Connection
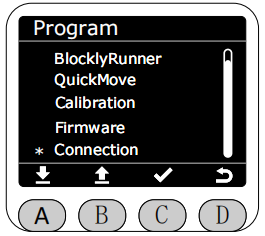
In the Program interface, select the Connection function by clicking the asterisk, and press the C key to enter the Connection function.
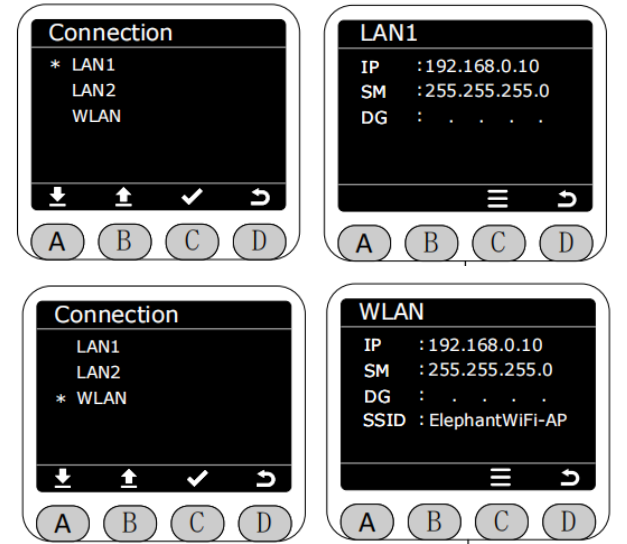
After entering the Connection function, you can select the corresponding network interface to display the configuration information of the current robotic arm network interface.