Control of the robotic arm
1 Slider control
Open a ROS2 environment terminal and run the command:
ros2 launch mercury_b1 slider_control.launch.py
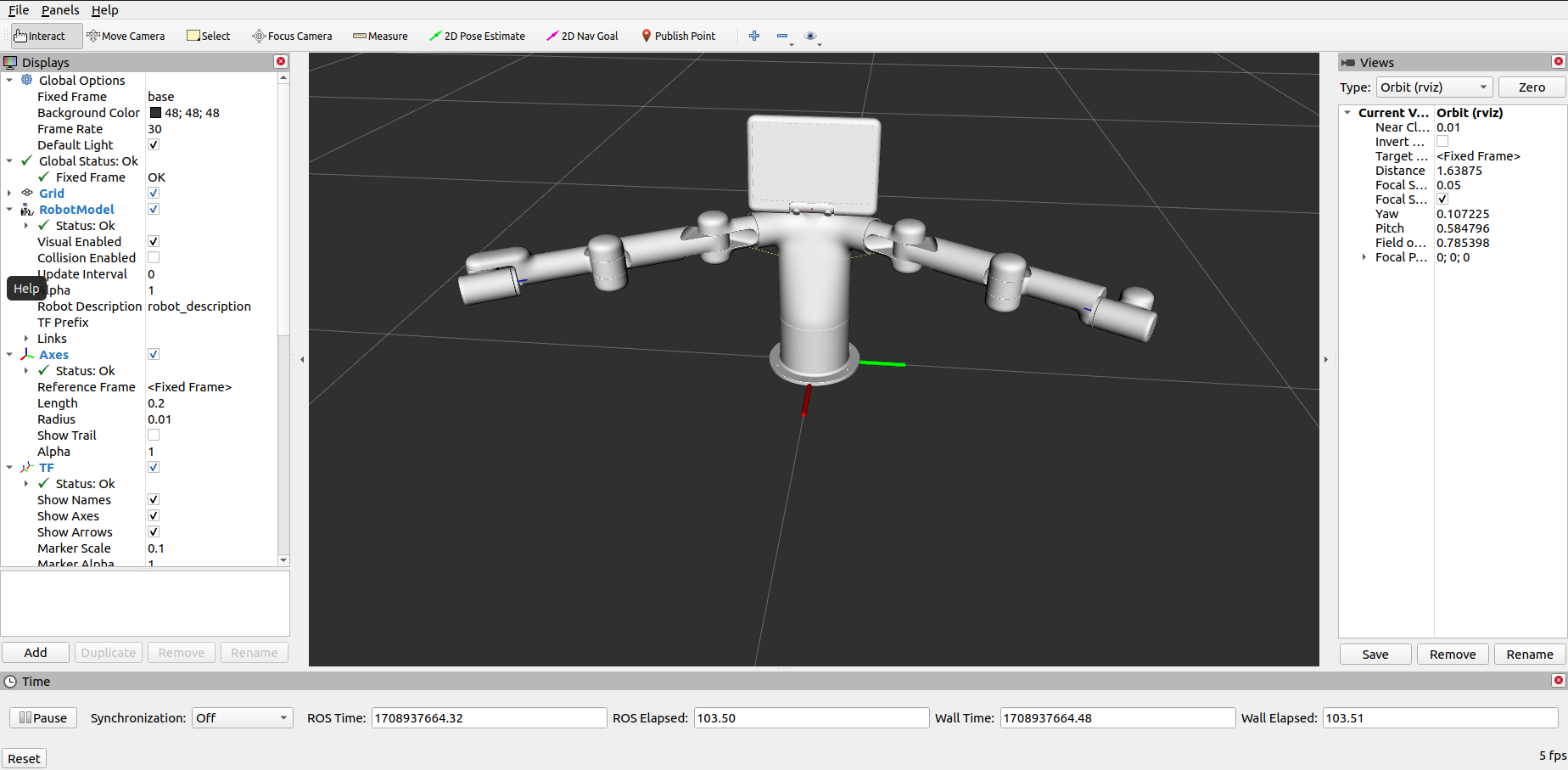
It will open rviz and a slider component, and you will see something like this:
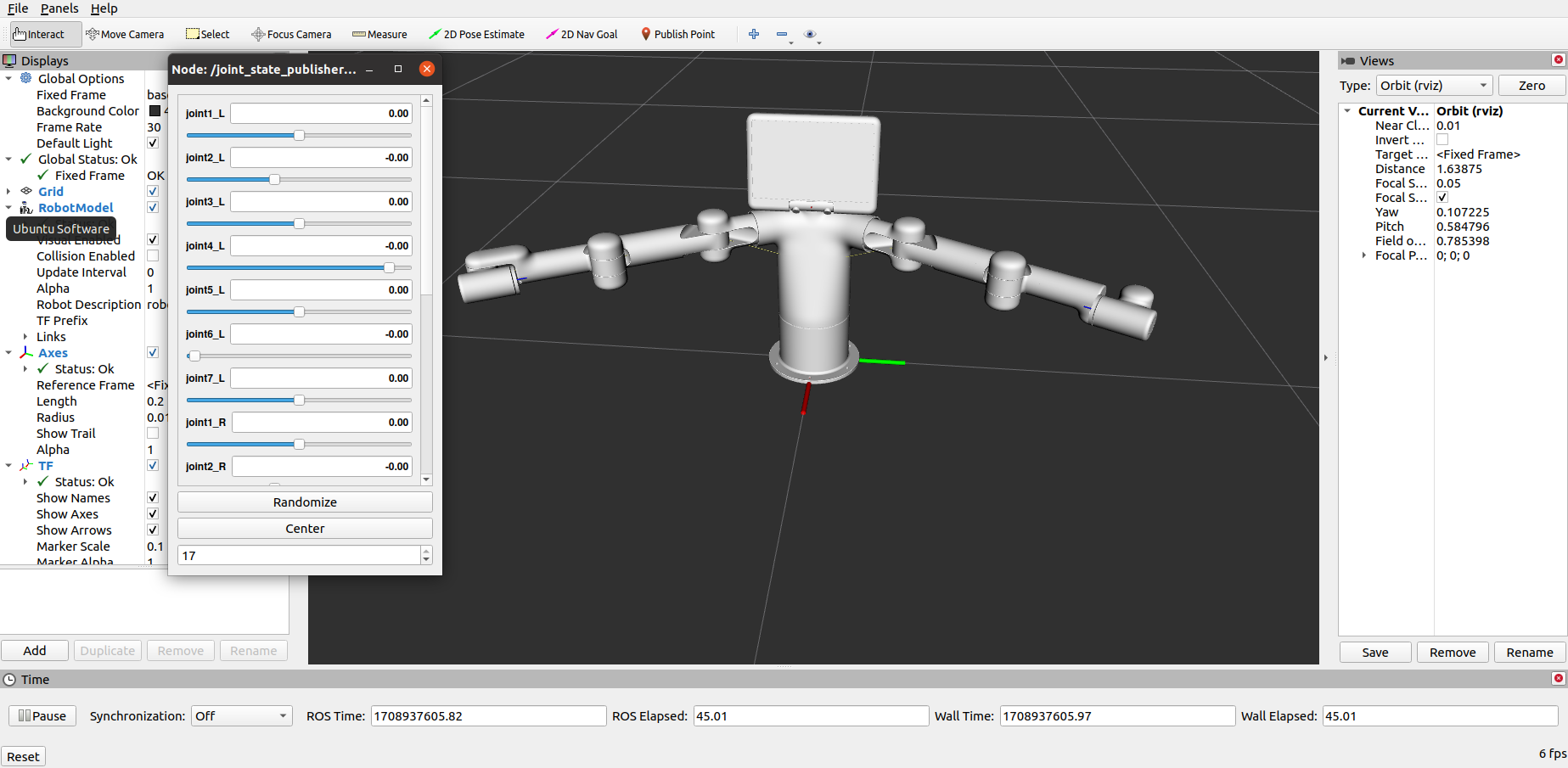
You can then control model movement in rviz2 by dragging the slider. A real Mercury B1 will move along.
Please note: Since the robot arm will move to the current position of the model when the command is entered, please make sure that the model in rviz2 does not have mold penetration before you use the command.
Do not quickly drag the slider after connecting the robotic arm to prevent damage to the robotic arm.
2 Model following
In addition to the above controls, we can also make the model follow the movement of the real robotic arm. Open a ROS2 environment terminal and run the command:
ros2 launch mercury_b1 mercury_follow.launch.py
It will open rviz to display the model following effect.