The Use of Sucking Pump
Preparation
M5Stack series: Make sure robot is connected with PC (Go to 5.1 myBlockly for more information).
Other series: Make sure the robot is in normal status.
This section takes myPalletizer 260 M5Stack as an example to explain the use of suction pump. Go to 2.8 Accessories for more information about sucking pump.
Purpose for this section
This section introduces instructions for using sucking pump.
Introduction to API
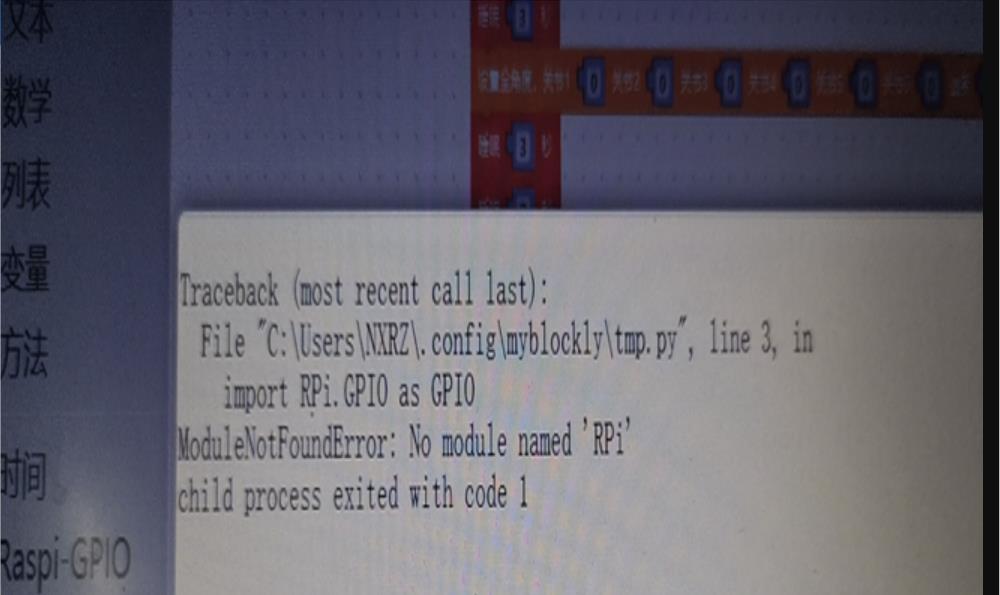
Notice: M5Stack version is unable to use the blocks belonging to Raspberry Pi version. Otherwise, the system may report an error.
Set Basic pin () output ()(for M5Stack version)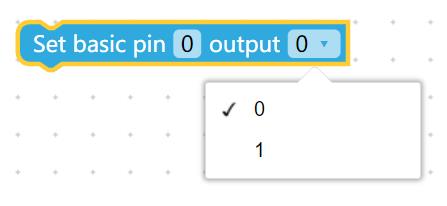
Applicable to myCobot 280 series, mechArm 270 series, and myPalletizer 260 series
Parameter:
pin (): the numerical part of the numbers marked at the bottom of the equipmentoutput ():0means setting to the running state, and1means setting to the stop state
Function: set the working state of the preset bottom pin
get_basic_input(pin_no)(for M5Stack version)

- Applicable to myCobot 280 series, mechArm 270 series, and myPalletizer 260 series
- Parameter:
pin(): the numerical part of the numbers marked at the bottom of the equipment
- Function: get the working state of the bottom pin number
set mode ()(for Raspberry Pi version )

- Applicable to myCobot 280 series, mechArm 270 series, and myPalletizer 260 series
- Parameter:
mode(): "BCM" or "BOARD"
- Function: set Raspberry Pi GPIO Pin Mode
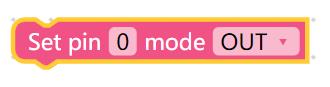
set pin() mode()(for Raspberry Pi version )
- Applicable to myCobot 280 series, mechArm 270 series, and myPalletizer 260 series
- Parameter:
pin (): the numerical part of the numbers marked at the bottom of the equipmentmode ():inmeans signal import, andOUTmeans signal output
- Function: set signal of the preset bottom pin
set pin() output()(for Raspberry Pi version )

- Applicable to myCobot 280 series, mechArm 270 series, and myPalletizer 260 series
- Parameter:
pin(): the numerical part of the numbers marked at the bottom of the equipmentoutput():HIGHmeans high level of sucking pump working state, andLOWmeans low level of sucking pump working state
- Function: set the working state of bottom pin to high level or low level
Simple Demo
- Program for display:
Vertical suction pump V1.0
The graphic code is as follows: (for M5 version)
 The graphic code is as follows: (for Raspberry Pi version)
The graphic code is as follows: (for Raspberry Pi version)
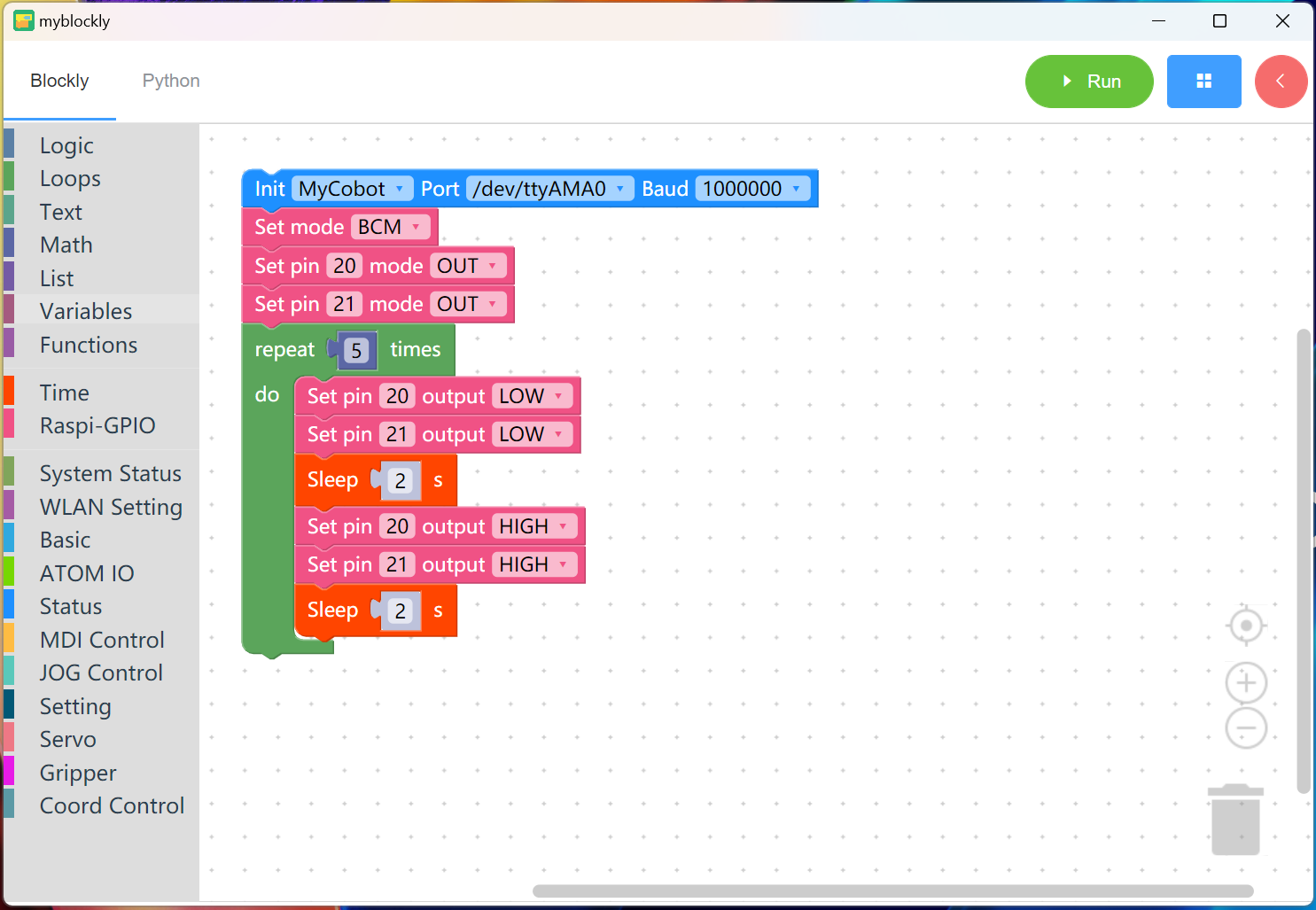
Motion:
Sucking pump vibrates and work to suck objects,
after 2 seconds, sucking pump put objects down,
after 2 seconds, it vibrates again. The whole process loops 5 times.
Vertical suction pump V2.0
The graphic code is as follows: (for M5 version)
 The graphic code is as follows: (for Raspberry Pi version)
The graphic code is as follows: (for Raspberry Pi version)
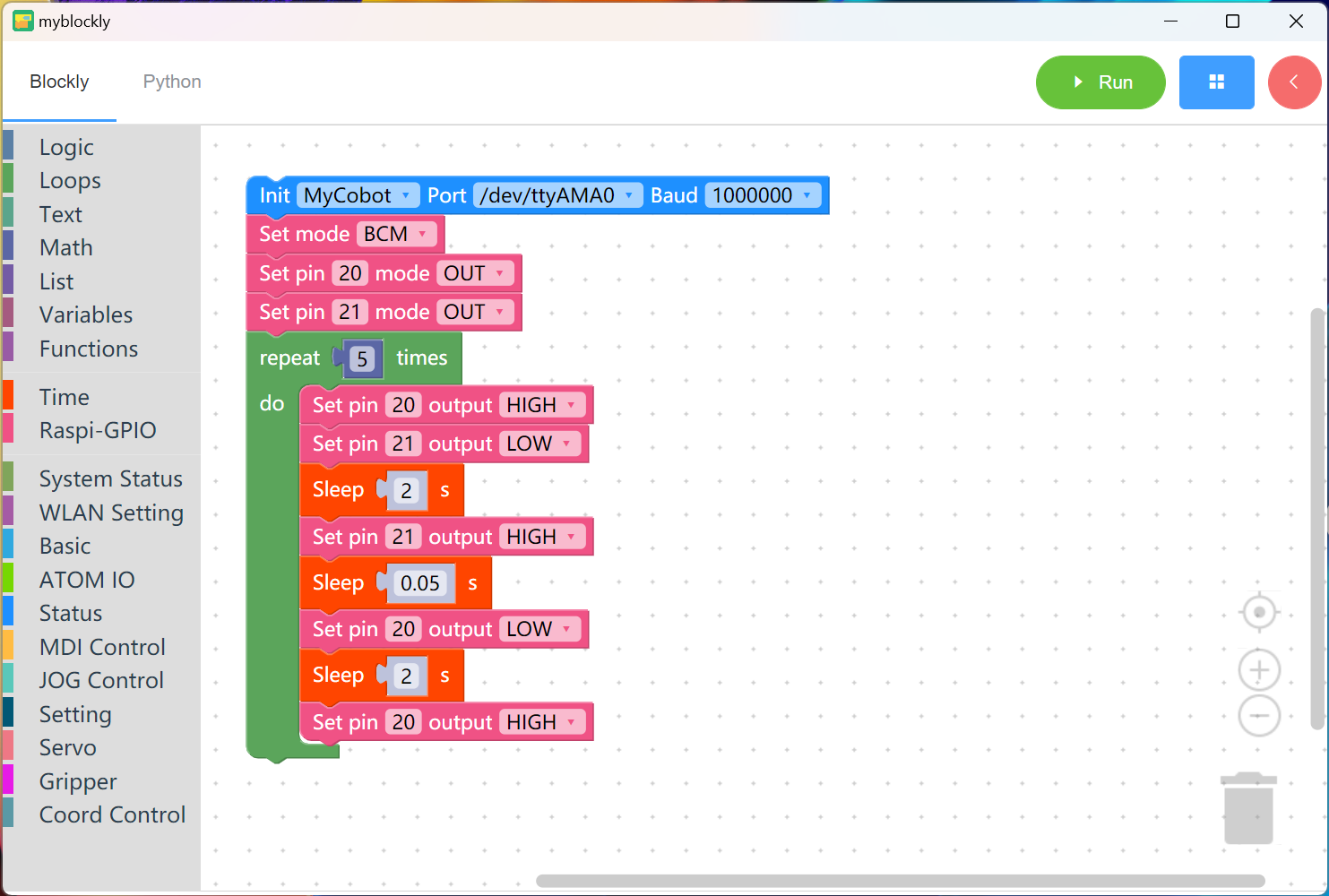
- Motion: First, close the solenoid valve and open the air release valve to prepare for starting the suction pump; After two seconds, close the vent valve. After 0.05 seconds, open the solenoid valve and the suction pump will vibrate, starting to work. The suction pump will pick up an object and after two seconds, put it down. Close the air release valve and repeat the previous action until the program is completed.