myCobot 280 for Arduino 2023

1 Structural Parameters
1.1 Parameters of Robotic Arm
| Indicator | Parameter |
|---|---|
| Product | Collaborative Robotic Arm |
| Model | myCobot 280 for Arduino 2023 |
| Degree of Freedom | 6 |
| Effective Load | 250g |
| Effective Working Radius | 280mm |
| Net Weight | 860g |
| Charger | 12V,5A |
| Operational Temperature | -5-45℃ |
| Communications | USB(Depends on the development board) |
1.2 Space Parameters of Working
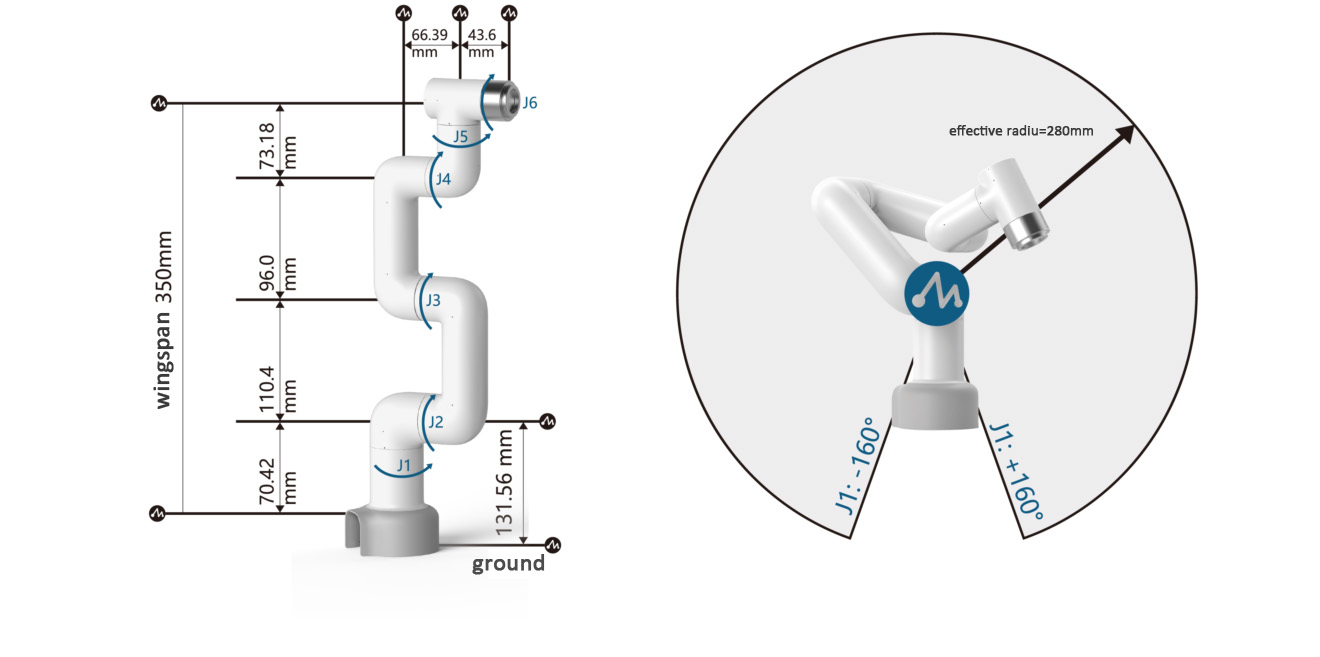
1.3 Diagram of Specification

1.4 Available Angle of Joints
| joint | Angle |
|---|---|
| J1 | -165 ~ +165 |
| J2 | -165 ~ +165 |
| J3 | -165 ~ +165 |
| J4 | -165 ~ +165 |
| J5 | -165 ~ +165 |
| J6 | -175 ~ +175 |
1.5 Installation Based on Positions of Holes
- Pedestal is installed with flange. It is also compatible with installation of LEGO parts and M4 screws.

- The end is installed with flange. It is compatible with both LEGO holes and holes for threaded holes of screw.

2 Electronic Parameters
| Indicator | Parameter |
|---|---|
| SOC | None |
| CPU | None |
| Bluetooth/Wireless | None |
| USB | None |
| Screen | None |
| HDMI interface | None |
| custom button | None |
| IO interface | Panel IOs are all adapter functions, depending on the expansion board. |
3 DH Parameters

SDH:
