Communication and Message Commands
Notice: Before the direct communication via communication protocol,
Transponderis required to be burnt on M5Stack-basic, and the latest atomMain on Atom.
1 Mechanical arm motion parameters
| Joint | minimum value° | maximum value° | Maximum speed (°/s) | Maximum acceleration (°/s²) |
|---|---|---|---|---|
| J1 | -168 | 168 | 150 | 200 |
| J2 | -135 | 135 | 150 | 200 |
| J3 | -150 | 150 | 150 | 200 |
| J4 | -145 | 145 | 150 | 200 |
| J5 | -165 | 165 | 150 | 200 |
| J6 | -180 | 180 | 150 | 200 |
| Axis | minimum value /mm | maximum value/mm** | Maximum speed (mm/s) | Maximum acceleration(mm/s²) |
|---|---|---|---|---|
| x | -281.45 | 281.45 | 100 | 400 |
| y | -281.45 | 281.45 | 100 | 400 |
| z | -70 | 412.76 | 100 | 400 |
| rx | -180° | 180° | 40° | 66°/s² |
| ry | -180° | 180° | 40° | 66°/s² |
| rz | -180° | 180° | 40° | 66°/s² |
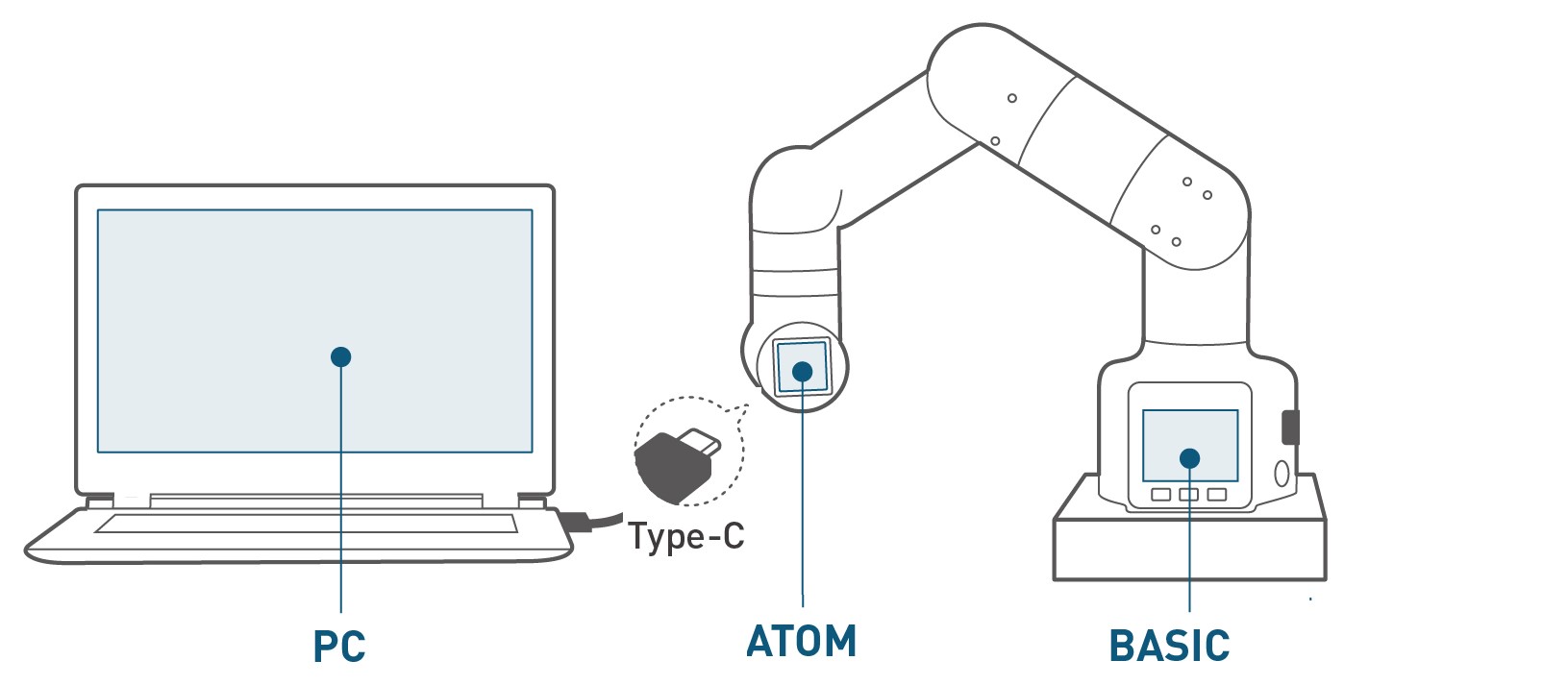
2 Settings of USB Communication
Make sure the following settings are prepared:
- Interface of mainline: USB Type-C connection
- Port ratio: 11520
- Data bit: 8
- Parity bit: none
- Stop bit: 1
3 Introduction to Command Frame & Sole Instruction
The main PC transmit data via M5Stakc-basic to peripheral PC. The peripheral PC decodes the data like commands with return values and then send the results back to the main PC within 500ms.
4 Formats of Message Commands' Sending and Receiving
Both sending and receiving should be represented in hexadecimal. Each command should contain 5 parts as shown below. Part 3 and 4 can be left a blank.
- 1 Pin of command: 0xFE 0xFE
- Invariable
- Indispensable
- 2 Effective lengthen:
- Aggregated length including pin, serial number, functional codes and end
- Indispensable
- 3 Serial number: 00 ~ 8F
- Corresponding number of developed commands
- You may leave it blank.
- 4 Functional codes:
- Purpose-oriented
- You may leave it blank.
- 5 End: 0XFA
- Invariable
- Indispensable
5 Explanation for Commands
The main PC transmit data via M5Stakc-basic to peripheral PC. The peripheral PC decodes the data like commands with return values and then send the results back to the main PC within 500ms.
| Type | Data | Length | Function |
|---|---|---|---|
| Command Frame | start bit: 0 | 1 | Head frame identification, 0XFE |
| start bit: 1 | 1 | Head frame identification, 0XFE | |
| bit of data length | 1 | Different commands correspond to different data length | |
| command bit | 1 | depending on different commands | |
| Command Frame | data | 0-16 | commands with data, depending on different commands |
| End Frame | end bit | 1 | stop bit, 0XFA |
6 Explanation for Sole-Instruction Commands
Powering up
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X10 |
| Data[4] | end frame | 0XFA |
Example:
Port transmission: FE FE 02 10 FA
no return value
Power Decreasing and Connection Breaking up
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X11 |
| Data[4] | end frame | 0XFA |
Example:
Port transmission: FE FE 02 11 FA
no return value
Checking the Status of Atom
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X12 |
| Data[4] | end frame | 0XFA |
Example:
Port transmission: FE FE 02 12 FA
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | return value: identification frame | 0XFE |
| Data[1] | return value: identification frame | 0XFE |
| Data[2] | return value: data-length frame | 0X03 |
| Data[3] | return value: command frame | 0X12 |
| Data[4] | power on/off | 0X01/0X00 |
| Data[5] | end frame | 0XFA |
Example:
Given that Atom is powered on:
port return: FE FE 03 12 01 FA
Power Decreasing
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X13 |
| Data[4] | end frame | 0XFA |
Example:
Port transmission: FE FE 02 13 FA
no return value
Robot System Checking: Normal
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X14 |
| Data[4] | end frame | 0XFA |
Example:
Port transmission: FE FE 02 14 FA
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | return value: identification frame | 0XFE |
| Data[1] | return value: identification frame | 0XFE |
| Data[2] | return value: data-length frame | 0X03 |
| Data[3] | return value: command frame | 0X14 |
| Data[4] | connection/connection breaking up | 0X01/0X00 |
| Data[5] | end frame | 0XFA |
Example:
Given that Atom is successfully connected:
port return: FE FE 03 14 01 FA
Command Updating Mode (Interpolation Setting/Motion Mode Updating)
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X03 |
| Data[3] | command frame | 0X16 |
| Data[4] | connection/connection breaking up | 0X01/0X00 |
| Data[5] | end frame | 0XFA |
Example:
Setting updating motion mode:
Port transmission: FE FE 03 16 01 FA
Setting interpolation motion mode:
Port transmission: FE FE 03 16 00 FA
Free Mode (switch off torsion output)
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X03 |
| Data[3] | command frame | 0X1A |
| Data[4] | turn on/off | 01/00 |
| Data[5] | end frame | 0XFA |
Example:
Setting free motion mode:
Port transmission: FE FE 03 1A 01 FA
Checking whether free mode is set
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X1B |
| Data[5] | end frame | 0XFA |
Example:
Port return: FE FE 02 1B FA
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | return value: identification frame | 0XFE |
| Data[1] | return value: identification frame | 0XFE |
| Data[2] | return value: data-length frame | 0X03 |
| Data[3] | command frame | 0X1B |
| Data[4] | turn on/off | 0X01/0X00 |
| Data[5] | end frame | 0XFA |
Example:
Given that Atom is in free mode:
port return: FE FE 03 1B 01 FA
Reading Angles (blocking information)
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X20 |
| Data[4] | end frame | 0XFA |
Example:
Port transmission: FE FE 02 20 FA
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | return value: head frame | 0XFE |
| Data[1] | return value: head frame | 0XFE |
| Data[2] | return value: data-length frame | 0X0E |
| Data[3] | return value: command frame | 0X20 |
| Data[4] | high angle of No.1 steering gear | Angle1_high |
| Data[5] | low angle of No.1 steering gear | Angle1_low |
| Data[6] | high angle of No.2 steering gear | Angle2_high |
| Data[7] | low angle of No.2 steering gear | Angle2_low |
| Data[8] | high angle of No.3 steering gear | Angle3_high |
| Data[9] | low angle of No.3 steering gear | Angle3_low |
| Data[10] | high angle of No.4 steering gear | Angle4_high |
| Data[11] | low angle of No.4 steering gear | Angle4_low |
| Data[12] | high angle of No.5 steering gear | Angle5_high |
| Data[13] | low angle of No.5 steering gear | Angle5_low |
| Data[14] | high angle of No.6 steering gear | Angle6_high |
| Data[15] | low angle of No.6 steering gear | Angle6_low |
| Data[16] | end frame | 0XFA |
Example:
Return value of port: FE FE 0E 20 00 8C 00 3D FF E6 FF 3F 00 AF FF 51 FA
How to get the angle of joint 1:
temp = angle1_low+angle1_high*256
Angle1=(temp \ 33000 ?(temp – 65536) : temp)/100
Explanation: if temp is greater than 33000, temp minus 65536, and then is divided by 100; if temp is less than 33000, then temp is divided by 100 directly.
Other joint angles are counted in a similar way.
Sending Sole Angle
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X06 |
| Data[3] | command frame | 0X21 |
| Data[4] | serial number of steering gear | joint_no |
| Data[5] | high angle | angle_high |
| Data[6] | low angle | angle_low |
| Data[7] | specified speed | sp |
| Data[8] | end frame | 0XFA |
Example:
Let the No.1 steering gear move to zero position
Port transmission: FE FE 06 21 01 00 00 14 FA
joint number: 1-6
angle_high: byte
counting method: angle value is multiplied by 100 and converted into integral form to get the hexadecimal highbyte
angle_low: byte
counting method: angle value is multiplied by 100 and converted into integral form to get the hexadecimal lowbyte
no return value
Sending Entire Angles
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X0F |
| Data[3] | command frame | 0X22 |
| Data[4] | high angle of No.1 steering gear | Angle1_high |
| Data[5] | low angle of No.1 steering gear | Angle1_low |
| Data[6] | high angle of No.2 steering gear | Angle2_high |
| Data[7] | low angle of No.2 steering gear | Angle2_low |
| Data[8] | high angle of No.3 steering gear | Angle3_high |
| Data[9] | low angle of No.3 steering gear | Angle3_low |
| Data[10] | high angle of No.4 steering gear | Angle4_high |
| Data[11] | low angle of No.4 steering gear | Angle4_low |
| Data[12] | high angle of No.5 steering gear | Angle5_high |
| Data[13] | low angle of No.5 steering gear | Angle5_low |
| Data[14] | high angle of No.6 steering gear | Angle6_high |
| Data[15] | low angle of No.6 steering gear | Angle6_low |
| Data[16] | specified speed | Sp |
| Data[17] | end frame | 0XFA |
Example:
Send 0 angle to entire joint, and let the steering gear move to zero position.
Port transmission: FE FE 0F 22 00 00 00 00 00 00 00 00 00 00 00 00 1E FA
angle1_high: byte
counting method: angle value is multiplied by 100 and converted into integral form to get the hexadecimal highbyte
angle1_low: byte
counting method: angle value is multiplied by 100 and converted into integral form to get the hexadecimal lowbyte
Other angles are counted in a similar way.
no return value
Reading the Entire Coordinates
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X23 |
| Data[4] | end frame | 0XFA |
Example:
Port transmission: FE FE 02 23 FA
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | return value: head frame | 0XFE |
| Data[1] | return value: head frame | 0XFE |
| Data[2] | return value: data-length frame | 0X0E |
| Data[3] | return value: command frame | 0X23 |
| Data[4] | specify high status of x coordinate | x_high |
| Data[5] | specify low status of x coordinate | x_low |
| Data[6] | specify high status of y coordinate | y_high |
| Data[7] | specify high status of z coordinate | z_high |
| Data[8] | specify low status of z coordinate | z_low |
| Data[9] | low angle of No.3 steering gear | Angle3_low |
| Data[10] | high angle of No.4 steering gear | Angle4_high |
| Data[11] | low angle of No.4 steering gear | Angle4_low |
| Data[12] | high angle of No.5 steering gear | Angle5_high |
| Data[13] | low angle of No.5 steering gear | Angle5_low |
| Data[14] | high angle of No.6 steering gear | Angle6_high |
| Data[15] | low angle of No.6 steering gear | Angle6_low |
| Data[16] | end frame | 0XFA |
Example:
Port return value: FE FE 0E 23 01 BC FD A0 10 15 DC 66 FF 54 DE 21 FA
How to get x coordinate:
temp = x_low + x_high*256
x coordinate =(temp\33000 ?(temp – 65536) : temp)/10
Explanation: if temp is greater than 33000, temp minus 65536, and then is divided by 100; if temp is less than 33000, then temp is divided by 100 directly.
y coordinate is counted in a similar way.
How to get rx coordinate:
temp = rx_low + rx_high*256
x coordinate =(temp \ 33000 ?(temp – 65536) : temp)/100
Explanation: if temp is greater than 33000, temp minus 65536, and then is divided by 100; if temp is less than 33000, then temp is divided by 100 directly.
y coordinate is counted in a similar way.
Sending Parameters of Sole Coordinate
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X06 |
| Data[3] | command frame | 0X24 |
| Data[4] | axis | x/y/z/rx/ry/rz |
| Data[5] | specify high status of the parameters of xyz/rxryrz | xyz/ rxryrz_high |
| Data[6] | specify low status of the parameters of xyz/rxryrz | xyz/rxryrz_low |
| Data[7] | specified speed | Sp |
| Data[8] | end frame | 0XFA |
Example:
Given that the x coordinate is 200 and target speed is 20,
port transmission: FE FE 06 24 01 07 D0 14 FA
specified axis coordinate: byte
range: 1-6
data type of xyz_high: byte
counting method: value of x/y/z coordinate is multiplied by 100 and converted into integral form to get the hexadecimal highbyte
data type of xyz_low: byte
counting method: value of x/y/z coordinate is multiplied by 100 and converted into integral form to get the hexadecimal lowbyte
data type of rxryrz_high: byte
counting method: value of rx/ry/rz coordinate is multiplied by 100 and converted into integral form to get the hexadecimal highbyte
data type of rxryrz_low: byte
counting method: value of rx/ry/rz coordinate is multiplied by 100 and converted into integral form to get the hexadecimal lowbyte
no Return Value
Sending Parameters of Entire Coordinate
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X10 |
| Data[3] | command frame | 0X25 |
| Data[4] | specify high status of x coordinate | x_high |
| Data[5] | specify low status of x coordinate | x_low |
| Data[6] | specify high status of y coordinate | y_high |
| Data[7] | specify low status of y coordinate | y_low |
| Data[8] | specify high status of z coordinate | z_high |
| Data[9] | specify low status of z coordinate | z_low |
| Data[10] | specify high status of rx coordinate | rx_high |
| Data[11] | specify low status of rx coordinate | rx_low |
| Data[12] | specify high status of ry coordinate | ry_high |
| Data[13] | specify low status of ry coordinate | ry_low |
| Data[14] | specify high status of rz coordinate | rz_high |
| Data[15] | specify low status of rz coordinate | rz_low |
| Data[16] | specifyd speed | Sp |
| Data[17] | mode | 0X01 |
| Data[17] | end frame | 0XFA |
Example:
Given that the coordinate of the end of robotic arm is (150.3,-68.7,101.8,10.18,0,-90), and speed is 10,
port transmission: FE FE 10 25 05 DF FD 51 03 FA BC 30 00 00 DC D8 0A 01 FA
data type of x_high: byte
counting method: value of x coordinate is multiplied by 10 and get the hexadecimal highbyte
data type of x_low: byte
counting method: value of x coordinate is multiplied by 10 and get the hexadecimal highbyte
y coordinate is counted in a similar way.
data type of rx_high: byte
counting method: value of rx coordinate is multiplied by 10 and get the hexadecimal highbyte
data type of rx_low: byte
counting method: value of rx coordinate is multiplied by 100 and get the hexadecimal highbyte
ry coordinate is counted in a similar way.
no return value
Program pause
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X26 |
| Data[4] | end frame | 0XFA |
Example:
Port transmission: FE FE 02 26 FA
no return value
Judging Whether Program Stops
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X27 |
| Data[4] | end frame | 0XFA |
Example:
Port transmission: FE FE 02 27 FA
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X27 |
| Data[4] | suspend/not suspend | 0X01/0X00 |
| Data[5] | end frame | 0XFA |
Example:
Given that program suspends,
port return value: FE FE 03 27 01 FA
Program Recover
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X28 |
| Data[4] | end frame | 0XFA |
Port transmission: FE FE 02 28 FA
no return value
Program Stops
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X29 |
| Data[4] | end frame | 0XFA |
Example:
Port transmission: FE FE 02 29 FA
no return value
Whether Reaching Specified Coordinate
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X0E/0X0F |
| Data[3] | command frame | 0X2A |
| Data[4] | high status of x coordinate/highbyte of angle of No.1 steering gear | x_high/Angle1_high |
| Data[5] | low status of x coordinate/lowbyte of angle of No.1 steering gear | x_low/Angle1_low |
| Data[6] | high status of y coordinate/highbyte of angle of No.2 steering gear | y_high/Angle2_high |
| Data[7] | low status of y coordinate/lowbyte of angle of No.2 steering gear | y_low/Angle2_low |
| Data[8] | high status of y coordinate/highbyte of angle of No.3 steering gear | z_high/Angle3_high |
| Data[9] | low status of z coordinate/lowbyte of angle of No.3 steering gear | z_low/Angle3_low |
| Data[10] | high status of rx coordinate/highbyte of angle of No.4 steering gear | rx_high/Angle4_high |
| Data[11] | low status of rx coordinate/lowbyte of angle of No.4 steering gear | rx_low/Angle4_low |
| Data[12] | high status of ry coordinate/highbyte of angle of No.5 steering gear | ry_high/Angle5_high |
| Data[13] | low status of ry coordinate/lowbyte of angle of No.5 steering gear | ry_low/Angle5_low |
| Data[14] | high status of rz coordinate/highbyte of angle of No.6 steering gear | rz_high/Angle6_high |
| Data[15] | low status of rz coordinate/lowbyte of angle of No.6 steering gear | rz_low/Angle6_low |
| Data[16] | coordinate/angle | 0X01/0X00 |
| Data[17] | end frame | 0XFA |
Example:
Judging whether robotic arm move to zero position:
port transmission: FE FE 0F 2A 00 00 00 00 00 00 00 00 00 00 00 00 00 FA
data type of x_high: byte
counting method: value of x coordinate is multiplied by 10 and converted into integral form to get the hexadecimal highbyte
data type of x_low: byte
counting method: value of x coordinate is multiplied by 10 and converted into integral form to get the hexadecimal lowbyte
y coordinate is counted in a similar way.
data type of rx_high: byte
counting method: value of rx coordinate is multiplied by 100 and converted into integral form to get the hexadecimal highbyte
data type of rx_low: byte
counting method: value of rx coordinate is multiplied by 100 and converted into integral form to get the hexadecimal lowbyte
ry coordinate is counted in a similar way.
data type of angle_high: byte
counting method: value angle is multiplied by 100 and converted into integral form to get the hexadecimal highbyte
data type of angle_low: byte
counting method: value of angle is multiplied by 100 and converted into integral form to get the hexadecimal lowbyte
Type: byte (temporarily unavailable)
Return Value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | return value: head frame | 0XFE |
| Data[1] | return value: head frame | 0XFE |
| Data[2] | return value: data-length frame | 0X03 |
| Data[3] | return value: command frame | 0X2a |
| Data[4] | reaching the point/not reaching the point | 0X01/0X00 |
| Data[5] | end frame | 0XFA |
Example:
Given that the robotic arm doesn't reach the point:
port return value: FE FE 03 2A 00 FA
Movement Check
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X2B |
| Data[4] | end frame | 0XFA |
Example:
port transmission: FE FE 02 2B FA
Return Value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | return value: head frame | 0XFE |
| Data[1] | return value: head frame | 0XFE |
| Data[2] | return value: data-length frame | 0X03 |
| Data[3] | return value: command frame | 0X2B |
| Data[4] | in motion/not in motion | 0X01/0X00 |
| Data[5] | end frame | 0XFA |
Example:
Given that the program is running:
port return value: FE FE 03 2B 01 FA
jog-Joint-Oriented Movement
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X05 |
| Data[3] | command frame | 0X30 |
| Data[4] | serial number of steering gear | Joint |
| Data[5] | direction of steering gear | direction |
| Data[6] | specified speed | sp |
| Data[7] | end frame | 0XFA |
Example:
Given that NO.1 steering gear is revolving clockwise at the speed of 20%:
port return value: FE FE 05 30 01 01 14 FA
range of serial number of joint: 1-6
di: data type of byte, either 0 or 1
sp: data type of byte, ranging from 0 to 100
no return value.
jod-Absolute Control
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X06 |
| Data[3] | command frame | 0X31 |
| Data[4] | serial number of steering gear | Joint |
| Data[5] | highbyte of angle of steering gear | Angle_high |
| Data[6] | lowbyte of angle of steering gear | Angle_low |
| Data[7] | specified speed | sp |
| Data[8] | end frame | 0XFA |
Example:
Given that No.1 steering gear moves to 45° at the speed of 20
port transmission: FE FE 06 31 01 11 94 14 FA
range of serial number of joint: 1-6
data type of Angle_high: byte
counting method: value of Angle_high is multiplied by 100 and converted into integral form to get the hexadecimal highbyte
data type of Angle_low: byte
counting method: value of Angle_low is multiplied by 100 and converted into integral form to get the hexadecimal lowbyte
sp: data type of byte, ranging from 0 to 100
no return value
jog-Coordinate-Oriented Movement
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X05 |
| Data[3] | command frame | 0X32 |
| Data[4] | specified coordinate | axis |
| Data[5] | direction of steering gear | di |
| Data[6] | specified speed | sp |
| Data[7] | end frame | 0XFA |
Example:
Given that robotic arm moves towards x coordinate at the speed of 20
port transmission: FE FE 06 32 01 01 14 FA
axis ranges from 1 to 6, representing x, y, z,rx, ry, rz
di: data type of byte, either 0 or 1
sp: data type of byte, ranging from 0 to 100
no return value
jog-Stepper Model
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X06 |
| Data[3] | command frame | 0X31 |
| Data[4] | serial number of steering gear | Joint |
| Data[5] | highbyte of angle of steering gear | Angle_high |
| Data[6] | lowbyte of angle of steering gear | Angle_low |
| Data[7] | specified speed | sp |
| Data[8] | end frame | 0XFA |
Example:
Given that the angle of No.1 steering expand by 45° and revolves at the speed of 20
port transmission: FE FE 06 33 01 11 94 14 FA
serial number of joint ranges from 1 to 6
data type of angle_high: byte
counting method: value angle is multiplied by 100 and converted into integral form to get the hexadecimal highbyte
data type of angle_low: byte
counting method: value of angle is multiplied by 100 and converted into integral form to get the hexadecimal lowbyte
sp: data type of byte, ranging from 0 to 100
no return value
Sending Potential
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X06 |
| Data[3] | command frame | 0X3A |
| Data[4] | serial number of steering gear | Joint |
| Data[5] | high status of potential | Encoder_high |
| Data[6] | low status of potential | Encoder_low |
| Data[7] | specified speed | sp |
| Data[8] | end frame | 0XFA |
Example:
Given that No.5 joint is set to 2048 and revolves at the speed of 20
port transmission: FE FE 05 3A 05 08 00 14 FA
serial number of joint ranges from 1 to 6
data type of Joint: byte
data type of Encoder_high: byte
counting method: get the high status of potential (in hexadecimal form)
data type of Encoder_low: byte
counting method: get the low status of potential (in hexadecimal form)
no return value
Get the Potential
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X03 |
| Data[3] | command frame | 0X3B |
| Data[4] | serial number of joint | joint |
| Data[5] | end frame | 0XFA |
Example:
get the potential of NO.2 steering gear
serial number of joint ranges from 1 to 6
Return Value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | return value: identification frame | 0XFE |
| Data[1] | return value: identification frame | 0XFE |
| Data[2] | return value: data-length frame | 0X04 |
| Data[3] | return value: command frame | 0X3B |
| Data[4] | high status of potential | Encoder_high |
| Data[5] | low status of potential | Encoders_low |
| Data[6] | end frame | 0XFA |
Example:
port transmission: FE FE 04 3B 08 07 FA
How potentials are counted:
potential = low status of potential + high status of potential * 256
Sending Potential of Six Steering Gears
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X0E/0X0F |
| Data[3] | command frame | 0X3C |
| Data[4] | highbyte of No.1 steering gear | encoder_1_high |
| Data[5] | lowbyte of No.1 steering gear | encoder_1_low |
| Data[6] | highbyte of No.2 steering gear | encoder_2_high |
| Data[7] | lowbyte of No.2 steering gear | encoder_2_low |
| Data[8] | highbyte of No.3 steering gear | encoder_3_high |
| Data[9] | lowbyte of No.3 steering gear | encoder_3_low |
| Data[10] | highbyte of No.4 steering gear | encoder_4_high |
| Data[11] | lowbyte of No.4 steering gear | encoder_4_low |
| Data[12] | highbyte of No.5 steering gear | encoder_5_high |
| Data[13] | lowbyte of No.5 steering gear | encoder_5_low |
| Data[14] | highbyte of No.6 steering gear | encoder_6_high |
| Data[15] | lowbyte of No.6 steering gear | encoder_6_low |
| Data[16] | specified speed | Sp |
| Data[17] | end frame | 0XFA |
Example:
Given that the potential of all is 2048, and the speed is 20
port transmission: FE FE 0F 3C 08 00 08 00 08 00 08 00 08 00 08 00 14 FA
Refer to the chart above for each potential.
data type of encoder_1_high: byte
counting method: convert the potential of No.1 steering gear into integral form and get the highbyte hexadecimal
data type of encoder_1_low: byte
counting method: convert the potential of No.1 steering gear into integral form and get the lowbyte hexadecimal
sp: data type of byte, ranging from 0 to 100
no return value
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X3D |
| Data[4] | end frame | 0XFA |
Example:
Port transmission: FE FE 02 3D FA
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X0E |
| Data[3] | command frame | 0X3D |
| Data[4] | highbyte of No.1 steering gear | encoder_1_high |
| Data[5] | lowbyte of No.1 steering gear | encoder_1_low |
| Data[6] | highbyte of No.2 steering gear | encoder_2_high |
| Data[7] | lowbyte of No.2 steering gear | encoder_2_low |
| Data[8] | highbyte of No.3 steering gear | encoder_3_high |
| Data[9] | lowbyte of No.3 steering gear | encoder_3_low |
| Data[10] | highbyte of No.4 steering gear | encoder_4_high |
| Data[11] | lowbyte of No.4 steering gear | encoder_4_low |
| Data[12] | highbyte of No.5 steering gear | encoder_5_high |
| Data[13] | lowbyte of No.5 steering gear | encoder_5_low |
| Data[14] | highbyte of No.6 steering gear | encoder_6_high |
| Data[15] | lowbyte of No.6 steering gear | encoder_6_low |
| Data[17] | end frame | 0XFA |
Example:
Given that all robotic arms are set in zero position,
port return value: FE FE 0E 3D 08 00 08 00 08 00 08 00 08 00 08 00 FA
How to count potential
How potentials are counted:
potential = low status of potential + high status of potential * 256
Reading Potential of Six Steering Gears
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X3D |
| Data[4] | end frame | 0XFA |
Example:
Port transmission: FE FE 02 3D FA
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X0E |
| Data[3] | command frame | 0X3D |
| Data[4] | highbyte of No.1 steering gear | encoder_1_high |
| Data[5] | lowbyte of No.1 steering gear | encoder_1_low |
| Data[6] | highbyte of No.2 steering gear | encoder_2_high |
| Data[7] | lowbyte of No.2 steering gear | encoder_2_low |
| Data[8] | highbyte of No.3 steering gear | encoder_3_high |
| Data[9] | lowbyte of No.3 steering gear | encoder_3_low |
| Data[10] | highbyte of No.4 steering gear | encoder_4_high |
| Data[11] | lowbyte of No.4 steering gear | encoder_4_low |
| Data[12] | highbyte of No.5 steering gear | encoder_5_high |
| Data[13] | lowbyte of No.5 steering gear | encoder_5_low |
| Data[14] | highbyte of No.6 steering gear | encoder_6_high |
| Data[15] | lowbyte of No.6 steering gear | encoder_6_low |
| Data[17] | end frame | 0XFA |
Example:
Given that all robotic arms are set in zero position,
port return value: FE FE 0E 3D 08 00 08 00 08 00 08 00 08 00 08 00 FA
How potentials are counted:
potential = low status of potential + high status of potential * 256
Setting Speed
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X03 |
| Data[3] | command frame | 0X41 |
| Data[4] | specified speed | Sp |
| Data[5] | end frame | 0XFA |
Sp: data type of byte, ranging from 0 to 100
Example:
Given that the speed is 50%
port return value: FE FE 03 41 32 FA
Reading the Smallest Angle
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X03 |
| Data[3] | command frame | 0X4A |
| Data[4] | serial number of steering gear | Joint_number |
| Data[5] | end frame | 0XFA |
Example:
Reading the smallest angle of joint 2
Port transmission: FE FE 03 4A 02 FA
serial number of joint ranges from 1 to 6
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | return value: identification frame | 0XFE |
| Data[1] | return value: identification frame | 0XFE |
| Data[2] | return value: data-length frame | 0X04 |
| Data[3] | return value: command frame | 0X4A |
| Data[4] | serial number of joint | Joint_number |
| Data[5] | high angle of steering gear | Angle_high |
| Data[6] | low angle of steering gear | Angle_low |
| Data[7] | end frame | 0XFA |
Example:
port return value: FE FE 05 4A 02 F9 F2 FA
How smallest angles are counted:
temp = angle1_low+angle1_high*256
Angle1=(temp \ 33000 ?(temp – 65536) : temp)/10
Explanation: if temp is greater than 33000, temp minus 65536, and then is divided by 10; if temp is less than 33000, then temp is divided by 10 directly.
Reading the Smallest Angle
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X03 |
| Data[3] | command frame | 0X4A |
| Data[4] | serial number of steering gear | Joint_number |
| Data[5] | end frame | 0XFA |
Serial number of joint ranges from 1 to 6
Example:
Reading the largest angle of joint 2
Port transmission: FE FE 03 4B 02 FA
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | return value: identification frame | 0XFE |
| Data[1] | return value: identification frame | 0XFE |
| Data[2] | return value: data-length frame | 0X05 |
| Data[3] | return value: command frame | 0X4A |
| Data[4] | serial number of joint | Joint_number |
| Data[5] | high angle of steering gear | Angle_high |
| Data[6] | low angle of steering gear | Angle_low |
| Data[7] | end frame | 0XFA |
Example:
port return value: FE FE 05 4B 02 06 72 FA
How the largest angles are counted:
temp = angle1_low+angle1_high*256
Angle1=(temp \ 33000 ?(temp – 65536) : temp)/10
Explanation: if temp is greater than 33000, temp minus 65536, and then is divided by 10; if temp is less than 33000, then temp is divided by 10 directly.
Setting the Smallest Angle
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | return value: identification frame | 0XFE |
| Data[1] | return value: identification frame | 0XFE |
| Data[2] | return value: data-length frame | 0X05 |
| Data[3] | return value: command frame | 0X4C |
| Data[4] | serial number of joint | Joint_number |
| Data[5] | high angle of steering gear | Angle_high |
| Data[6] | low angle of steering gear | Angle_low |
| Data[7] | end frame | 0XFA |
Example:
Given that the smallest angle of joint 2 is 0
Serial number of joint ranges from 1 to 6
data type of angle1_high: byte
counting method: angleis multiplied by 100 and converted into integral form to get the hexadecimal highbyte
data type of angle1_low: byte
counting method: angleis multiplied by 100 and converted into integral form to get the hexadecimal lowbyte
Port transmission: FE FE 05 4C 02 00 00 FA
no return value
Setting the Largest Angle
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X05 |
| Data[3] | command frame | 0X4D |
| Data[4] | serial number of joint | Joint_number |
| Data[5] | highbyte of steering gear | Angle_high |
| Data[6] | lowbyte of steering gear | Angle_low |
| Data[7] | end frame | 0XFA |
Example:
Given that the largest angle of joint 2 is 45
Serial number of joint ranges from 1 to 6
data type of angle1_high: byte
counting method: angleis multiplied by 100 and converted into integral form to get the hexadecimal highbyte
data type of angle1_low: byte
counting method: angleis multiplied by 100 and converted into integral form to get the hexadecimal lowbyte
Port transmission: FE FE 05 4C 02 11 94 FA
no return value
Checking Connection
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X03 |
| Data[3] | command frame | 0X50 |
| Data[4] | serial number of steering gear | Joint_number |
| Data[5] | end frame | 0XFA |
Serial number of joint ranges from 1 to 6
Example:
Checking whether No.1 steering gear is connected
Port transmission: FE FE 03 50 01 FA
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | return value: identification frame | 0XFE |
| Data[1] | return value: identification frame | 0XFE |
| Data[2] | return value: data-length frame | 0X03 |
| Data[3] | command frame | 0X50 |
| Data[4] | serial number of joint | Joint_number |
| Data[5] | connected/not connected | 0X01/0X00 |
| Data[6] | end frame | 0XFA |
Example:
No.1 steering gear is connected
Port return value: FE FE 04 50 01 01 FA
Checking Whether All Steering Gears Are Powered On
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X51 |
| Data[5] | end frame | 0XFA |
Example:
Port transmission: FE FE 02 51 FA
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | return value: identification frame | 0XFE |
| Data[1] | return value: identification frame | 0XFE |
| Data[2] | return value: data-length frame | 0X03 |
| Data[3] | return value: command frame | 0X51 |
| Data[4] | power on/off | 0X01/0X00 |
| Data[5] | end frame | 0XFA |
Example:
Not all steering gears are powered on
Port transmission: FE FE 03 51 01 FA
Reading Servo Parameters
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X04 |
| Data[3] | command frame | 0X53 |
| Data[4] | serial number of joint | Joint_number |
| Data[5] | data address | data_id |
| Data[6] | end frame | 0XFA |
Example:
Reading ratio parameter of P position of No.1 steering gear
Port transmission: FE FE 03 51 01 FA
Serial number of joint ranges from 1 to 6
Data_id: data type byte, referring to the chart below for specific value:
| Address | Function | Range | Initial Value | Explanation |
|---|---|---|---|---|
| 20 | LED siren | 0-254 | 0 | 1\0: turn on/off LED siren |
| 21 | position loop P | 0-254 | 10 | control the ratio coefficient |
| 22 | position loop I | 0-254 | 0 | control the differential coefficient |
| 23 | position loop D | 0-254 | 1 | control the integral-action coefficient |
| 24 | minimum starting force | 0-1000 | 0 | set the smallest torque output capability 1000 = 100% |
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | return value: identification frame | 0XFE |
| Data[1] | return value: identification frame | 0XFE |
| Data[2] | return value: data-length frame | 0X03 |
| Data[3] | return value: command frame | 0X53 |
| Data[4] | return value: data | data |
| Data[5] | end frame | 0XFA |
Setting Servo Parameters
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X05 |
| Data[3] | command frame | 0X52 |
| Data[4] | serial number of joint | Joint_no |
| Data[5] | data address | data_id |
| Data[6] | end frame | 0XFA |
Example:
Reading ratio parameter of P position of No.1 steering gear
Port transmission: FE FE 05 52 01 15 01 FA
Serial number of joint ranges from 1 to 6
no return value
Data_id: data type byte, referring to the chart below for specific value:
| Address | Function | Range | Initial Value | Explanation |
|---|---|---|---|---|
| 20 | LED siren | 0-254 | 0 | 1\0: turn on/off LED siren |
| 21 | position loop P | 0-254 | 10 | control the ratio coefficient |
| 22 | position loop I | 0-254 | 0 | control the differential coefficient |
| 23 | position loop D | 0-254 | 1 | control the integral-action coefficient |
| 24 | minimum starting force | 0-1000 | 0 | set the smallest torque output capability 1000 = 100% |
Setting Zero Position of Steering Gear
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X03 |
| Data[3] | command frame | 0X54 |
| Data[4] | serial number of joint | Joint_no |
| Data[6] | end frame | 0XFA |
Example:
Reading zero position of No.1 steering gear
Port transmission: FE FE 03 54 01 FA
Serial number of joint ranges from 1 to 6
no return value
Braking Single Motor
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X55 |
| Data[4] | serial number of joint | Joint_no |
| Data[5] | end frame | 0XFA |
Example:
Serial number of joint ranges from 1 to 6
Braking No.1 steering gear,
Port transmission: FE FE 03 55 01 FA
no return value
Power Failure of Single Motor
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X03 |
| Data[3] | command frame | 0X56 |
| Data[4] | serial number of steering gear | Servo_no |
| Data[5] | end frame | 0XFA |
Example:
Let No.3 steering gear reducing power
Serial number of servo ranges from 1 to 6
no return value
Powering On a Single Motor
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X03 |
| Data[3] | command frame | 0X57 |
| Data[4] | serial number of steering gear | Servo_no |
| Data[5] | end frame | 0XFA |
Example:
power on No.1 steering gear
Port transmission: FE FE 03 57 01 FA
Serial number of servo ranges from 1 to 6
no return value
Setting Mode of Atom
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X04 |
| Data[3] | command frame | 0X60 |
| Data[4] | serial number of pin | pin_no |
| Data[5] | input/output | 00X00/00X01 |
| Data[6] | end frame | 0XFA |
Example:
setting atom pin22 as input mode
Port transmission: FE FE 04 60 16 00 FA
Pin_no: data type byte
Pin_mode:0/1
no return value
Setting Atom IO (setDigitalOutput)
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X04 |
| Data[3] | command frame | 0X61 |
| Data[4] | serial number of pin | pin_no |
| Data[5] | signal of electrical level | 00X00/00X01 |
| Data[6] | end frame | 0XFA |
Example:
setting atom pin23 as high electrical level
Port transmission: FE FE 04 61 17 01 FA
no return value
Reading Atom IO(getDigitalInput)
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X04 |
| Data[3] | command frame | 0X61 |
| Data[4] | serial number of pin | pin_no |
| Data[5] | end frame | 0XFA |
Example:
reading signal of electrical level of pin23
Port transmission: FE FE 03 62 16 FA
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | return value: identification frame | 0XFE |
| Data[1] | return value: identification frame | 0XFE |
| Data[2] | return value: data-length frame | 0X03 |
| Data[3] | return value: command frame | 0X53 |
| Data[4] | pin number | pin_no |
| Data[5] | signal of electrical level | 0X00/0X01 |
| Data[6] | end frame | 0XFA |
Example:
Given that pin 22 is of high electrical level
Port return value: FE FE 04 62 16 01 FA
Reading the Angle of Gripper
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X65 |
| Data[4] | end frame | 0XFA |
Example:
Port transmission: FE FE 02 65 FA
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | return value: identification frame | 0XFE |
| Data[1] | return value: identification frame | 0XFE |
| Data[2] | return value: data-length frame | 0X03 |
| Data[3] | return value: command frame | 0X65 |
| Data[4] | span of gripper's opening | value |
| Data[5] | end frame | 0XFA |
value:0-100%
Example:
Given that gripper is completely opening
Port return value: FE FE 03 65 64 FA
value: 6 * 16 + 4 = 100
Setting the Mode of Gripper
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X04 |
| Data[3] | command frame | 0X66 |
| Data[4] | gripper opening/closing | 0X00/0X01 |
| Data[5] | speed | Sp |
| Data[6] | end frame | 0XFA |
Example:
making gripper open at the speed of 50
Port transmission: FE FE 04 66 00 32 FA
no return value
Setting Angles of Gripper
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X04 |
| Data[3] | command frame | 0X67 |
| Data[4] | span of gripper's opening/closing | value |
| Data[5] | speed | Sp |
| Data[6] | end frame | 0XFA |
Example:
Given that gripper opens by 50% at the speed of 30
Port transmission: FE FE 04 67 32 14 FA
The value can be converted into hexadecimal
no return value
Setting the Gripper to Zero Position
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X68 |
| Data[4] | end frame | 0XFA |
Example:
Setting the Gripper to Zero Position
Port transmission: FE FE 02 68 FA
Checking Whether the Gripper is Moving
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X69 |
| Data[4] | end frame | 0XFA |
Port transmission: FE FE 02 69 FA
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X04 |
| Data[3] | command frame | 0X69 |
| Data[4] | stop/move | 00/01 |
| Data[6] | end frame | 0XFA |
Given that gripper stops working
Port transmission: FE FE 03 69 00 FA
Setting RGB of Atom
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X05 |
| Data[3] | command frame | 0X6A |
| Data[4] | R | 0X00/0XFF |
| Data[5] | G | 0X00/0XFF |
| Data[6] | B | 0X00/0XFF |
| Data[7] | end frame | 0XFA |
Example:
Setting RGB color as blue
Port transmission: FE FE 05 6A 00 00 FF FA
no return value
Setting IO Output
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X04 |
| Data[3] | command frame | 0Xa0 |
| Data[4] | pin number | Pin_no |
| Data[5] | signal of electrical level | 0X00/0X01 |
| Data[4] | end frame | 0XFA |
Example:
Setting high electrical level of pin 2
Port transmission: FE FE 02 a0 02 01 FA
Reading IO Output
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X03 |
| Data[3] | command frame | 0Xa1 |
| Data[4] | pin number | Pin_no |
| Data[4] | end frame | 0XFA |
Port transmission: FE FE 02 a0 02 01 FA
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | return value: identification frame | 0XFE |
| Data[1] | return value: identification frame | 0XFE |
| Data[2] | return value: data-length frame | 0X04 |
| Data[3] | return value: command frame | 0Xa1 |
| Data[4] | pin number | Pin_no |
| Data[5] | signal of electrical level | 0X00/0X01 |
| Data[6] | end frame | 0XFA |
Example:
Given that pin 2 has high electrical level
Port return value: FE FE 04 a1 02 01 FA
Acquirng WiFi Account & Password
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0Xb1 |
| Data[4] | end frame | 0XFA |
Example:
Port transmission: FE FE 02 b1 FA
port return value: ssid: MyCobotWiFi2.4G password: mycobot123
ssid: WiFi account
password: WiFi password
Setting Port Number
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X04 |
| Data[3] | command frame | 0Xb2 |
| Data[4] | highbyte of port | port_high |
| Data[5] | lowbyte of port | port_low |
| Data[6] | end frame | 0XFA |
Example:
Given that port number is 7000
Port transmission: FE FE 04 b2 1b 58 FA
port_high: highbyte of hexadecimal port number
port_low: lowbyte of hexadecimal port number
No return value
Setting Tool Coordinate
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X0E |
| Data[3] | command frame | 0X81 |
| Data[4] | specify high status of x coordinate | x_high |
| Data[5] | specify low status of x coordinate | x_low |
| Data[6] | specify high status of y coordinate | y_high |
| Data[7] | specify low status of y coordinate | y_low |
| Data[8] | specify high status of z coordinate | z_high |
| Data[9] | specify low status of z coordinate | z_low |
| Data[10] | specify high status of rx coordinate | rx_high |
| Data[11] | specify low status of rx coordinate | rx_low |
| Data[12] | specify high status of ry coordinate | ry_high |
| Data[13] | specify low status of ry coordinate | ry_low |
| Data[14] | specify high status of rz coordinate | rz_high |
| Data[15] | specify low status of rz coordinate | rz_low |
| Data[16] | end frame | 0XFA |
Example:
Given that (0,0,50,0,0,0)is tool coordinate,
Port transmission: FE FE 0E 81 00 00 00 00 13 88 00 00 00 00 00 00 FA
no return value
Acquiring Tool Coordinate
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X82 |
| Data[4] | end frame | 0XFA |
Example:
Port transmission: FE FE 04 b2 1b 58 FA
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X0E |
| Data[3] | command frame | 0X81 |
| Data[4] | specify high status of x coordinate | x_high |
| Data[5] | specify low status of x coordinate | x_low |
| Data[6] | specify high status of y coordinate | y_high |
| Data[7] | specify low status of y coordinate | y_low |
| Data[8] | specify high status of z coordinate | z_high |
| Data[9] | specify low status of z coordinate | z_low |
| Data[10] | specify high status of rx coordinate | rx_high |
| Data[11] | specify low status of rx coordinate | rx_low |
| Data[12] | specify high status of ry coordinate | ry_high |
| Data[13] | specify low status of ry coordinate | ry_low |
| Data[14] | specify high status of rz coordinate | rz_high |
| Data[15] | specify low status of rz coordinate | rz_low |
| Data[16] | end frame | 0XFA |
Port return value: FE FE 0E 82 00 00 00 00 13 88 00 00 00 00 00 00 FA
How to get x coordinate:
temp = x_low + x_high*256
x coordinate =(temp\33000 ?(temp – 65536) : temp)/10
Explanation: if temp is greater than 33000, temp minus 65536, and then is divided by 100; if temp is less than 33000, then temp is divided by 100 directly.
y coordinate is counted in a similar way.
How to get rx coordinate:
temp = rx_low + rx_high*256
x coordinate =(temp \ 33000 ?(temp – 65536) : temp)/100
Explanation: if temp is greater than 33000, temp minus 65536, and then is divided by 100; if temp is less than 33000, then temp is divided by 100 directly.
ry coordinate is counted in a similar way.
Setting World Coordinate
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X0E |
| Data[3] | command frame | 0X81 |
| Data[4] | specify high status of x coordinate | x_high |
| Data[5] | specify low status of x coordinate | x_low |
| Data[6] | specify high status of y coordinate | y_high |
| Data[7] | specify low status of y coordinate | y_low |
| Data[8] | specify high status of z coordinate | z_high |
| Data[9] | specify low status of z coordinate | z_low |
| Data[10] | specify high status of rx coordinate | rx_high |
| Data[11] | specify low status of rx coordinate | rx_low |
| Data[12] | specify high status of ry coordinate | ry_high |
| Data[13] | specify low status of ry coordinate | ry_low |
| Data[14] | specify high status of rz coordinate | rz_high |
| Data[15] | specify low status of rz coordinate | rz_low |
| Data[16] | end frame | 0XFA |
Port return value: FE FE 0E 84 00 00 00 00 13 88 00 00 00 00 00 00 FA
How to get x coordinate:
temp = x_low + x_high*256
x coordinate =(temp\33000 ?(temp – 65536) : temp)/10
Explanation: if temp is greater than 33000, temp minus 65536, and then is divided by 100; if temp is less than 33000, then temp is divided by 100 directly.
y coordinate is counted in a similar way.
How to get rx coordinate:
temp = rx_low + rx_high*256
x coordinate =(temp \ 33000 ?(temp – 65536) : temp)/100
Explanation: if temp is greater than 33000, temp minus 65536, and then is divided by 100; if temp is less than 33000, then temp is divided by 100 directly.
ry coordinate is counted in a similar way.
Setting Base Coordinate
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X03 |
| Data[3] | command frame | 0X85 |
| Data[4] | base coordinate/world coordiante | 00/01 |
| Data[5] | end frame | 0XFA |
Example:
Given that the coordinate should be set as world coordinate
port transmission: FE FE 03 85 01 FA
no return value
Acquiring Base Coordinate
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X86 |
| Data[4] | end frame | 0XFA |
Example:
port transmission: FE FE 02 86 FA
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | return value: identification frame | 0XFE |
| Data[1] | return value: identification frame | 0XFE |
| Data[2] | return value: data-length frame | 0X03 |
| Data[3] | return value: command frame | 0X86 |
| Data[4] | base coordinate/world coordiante | 00/01 |
| Data[5] | end frame | 0XFA |
Example:
port transmission: FE FE 03 86 01 FA
Setting End Coordinate
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X03 |
| Data[3] | command frame | 0X89 |
| Data[4] | flange | 00/01 |
| Data[5] | end frame | 0XFA |
Example:
Given that end coordinate are set as tool
port transmission: FE FE 03 89 01 FA
no return value
Acquiring End Coordinate
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X02 |
| Data[3] | command frame | 0X8a |
| Data[4] | end frame | 0XFA |
Example:
port transmission: FE FE 02 8a FA
Return value: data structure
| Domain | Explanation | Data |
|---|---|---|
| Data[0] | identification frame | 0XFE |
| Data[1] | identification frame | 0XFE |
| Data[2] | data-length frame | 0X03 |
| Data[3] | command frame | 0X8a |
| Data[4] | flange | 00/01 |
| Data[5] | end frame | 0XFA |
Example:
port return value: FE FE 03 86 01 FA
Appendix
The specific method of adding coordinate-exchanging programs from Atom repository and sports repository are listed as following.
- Change end coordinate.
Set end coordinate by setEndType and getEndType.
FLANGE: Setting EndType as FLANG; TOOL: Setting EndType as TOOL End.
- Read tool coordinate via setToolReference and getToolReference. (FLANGE serves as relative coordinate and information about tool end is relevant to FLANGE coordinate.)
- After setting EndType as FLANGE, GetCoords and WriteCoords are counted depending on FLANG's position.
- After setting EndType as TOOL, GetCoords and WriteCoords are counted depending on end's position.
- Change base coordinate.
Set base coordinate by setReferenceFrame.
RFType: Base means setting robotic pedestal as base coordinate; RFType:WORLD means make world coordinate as base coordinate; getReferenceFrame serves to read the type of base coordinate.
- setWorldReference and getWorldReference works to read information about base coordinate. World coordinate serves as relative coordinate to type pedestal information of robots that is relevant to world coordinate.
- If base coordinate acts as pedestal, GetCoords and WriteCoords take base coordinate as reference coordinate.
- If world coordinate acts as pedestal, GetCoords and WriteCoords take world coordinate as reference coordinate.
Information Updating About Communication
These are newly-added functions: setting and reading of end coordinate, world coordinate, present coordinate, type of end, as well as moving method, and sending and receiving of information on robotic arms.
The communication is temporarily set as from 0x80 to 0x8A.
The roboticMessages space is specially added in ParameterList.h for more communication information. Now only No Analytical Solution signal has been added, while more will be added later.
The outline of MOVEL are listed as follows:
First, count the Euclidean Distance between starting point and target point. Second, interpolation points are inserted every 10mm, based on the Euclidean Distance. If interpolation points do not have analytical solution, then search for plus or minus PI/30 from three unchangeable direction for analytical solution. Avoid singular value and some distinctive position that cannot get analytical solution.
Change the interval between MOVEL and JOG into dynamic time. And then, count the time spend moving through the maximum joint. And then, minus the moving time by specific period to take it as interval.