树莓派控制
1 连接PI和机械臂
如图所示,使用提供的串口线连接PC
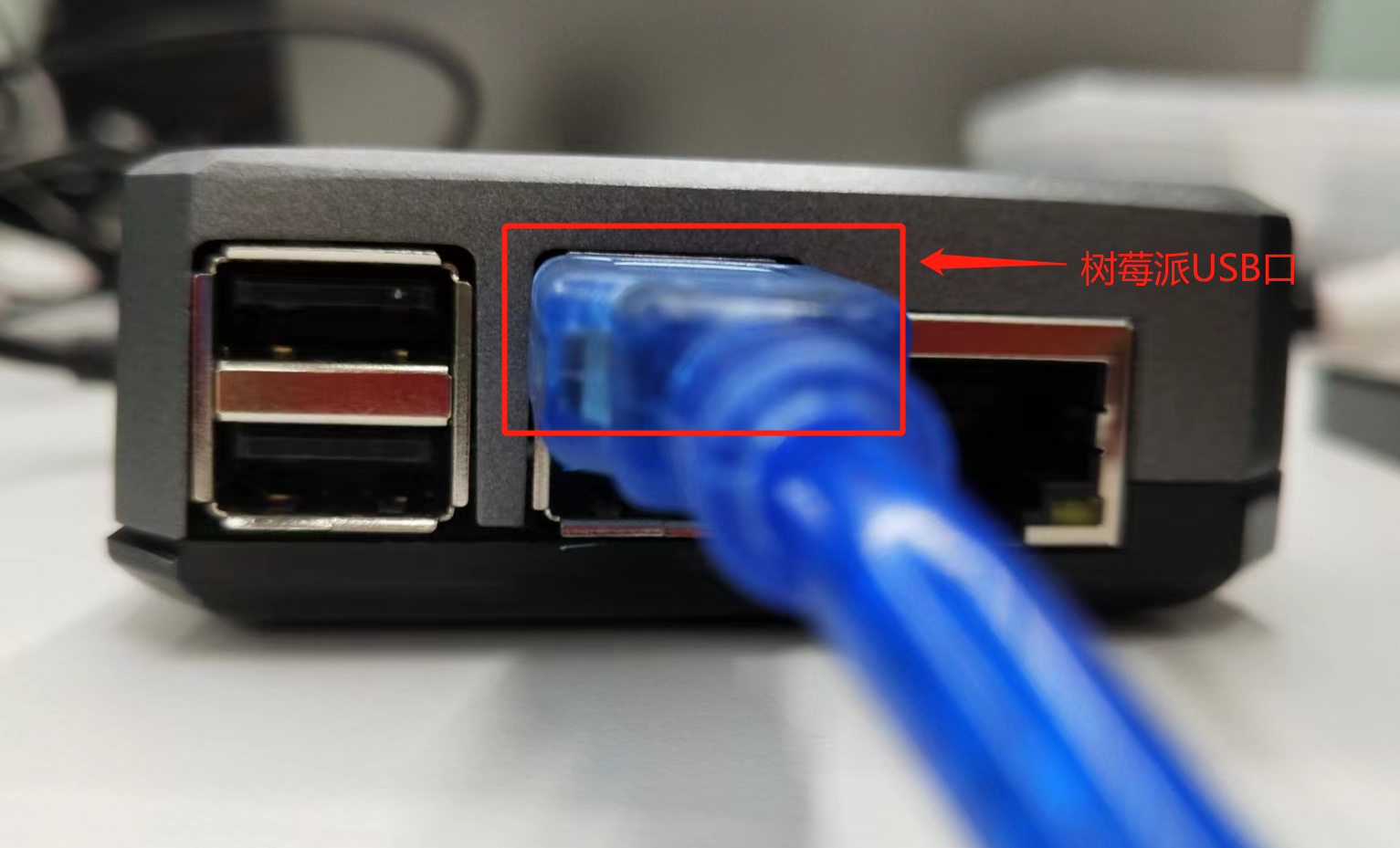
如图所示,使用提供的串口线连接机械臂

2 查看串口
- 使用串口连接机械臂后
PI连接显示屏,连接Type-C口供电口

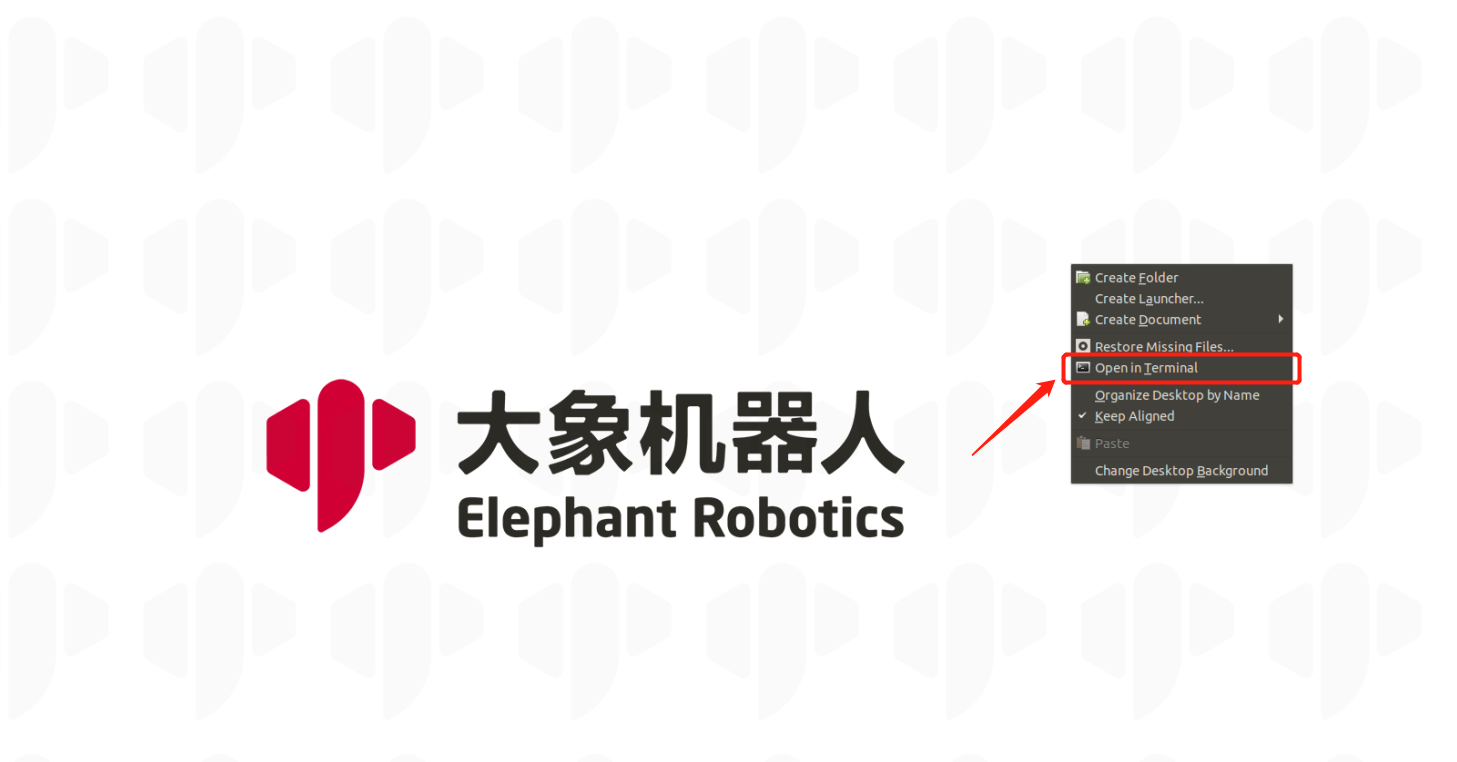
进入系统后,在桌面右键打开菜单,点击 “Open in Terminal”
输入 “ls /dev/ttyUSB*” 查询串口,如图所示 “/dev/ttyUSB0” 就是机械臂的串口号

3 简单控制
- 成功连接机械臂后,双击打开 myBlockly 编程软件
拖拽积木块进行如下编程
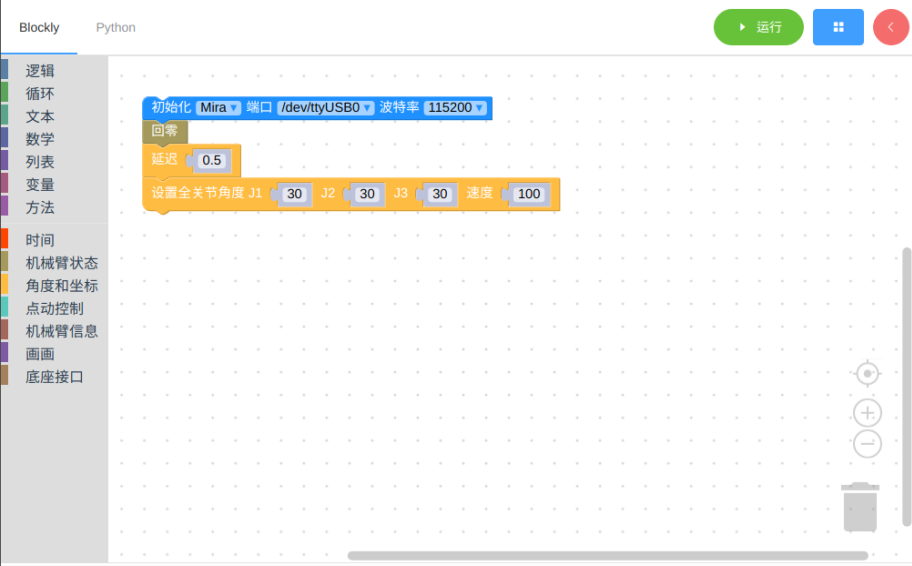
点击 “运行”,控制机械臂移动
