硬件安装
棋盘安装
在棋盘下侧的两个角落,贴上二维码

在棋盘帽的两个角落,贴上二维码

有二维码的一面,面向机械臂放置到棋盘底座上

拧上棋子架的螺丝

机械臂安装
根据机型和螺丝孔位图确定安装位置

先使用螺丝固定机械臂到底盘上

取出下棋装置和连接件;注意这里装置上的微小固定结构
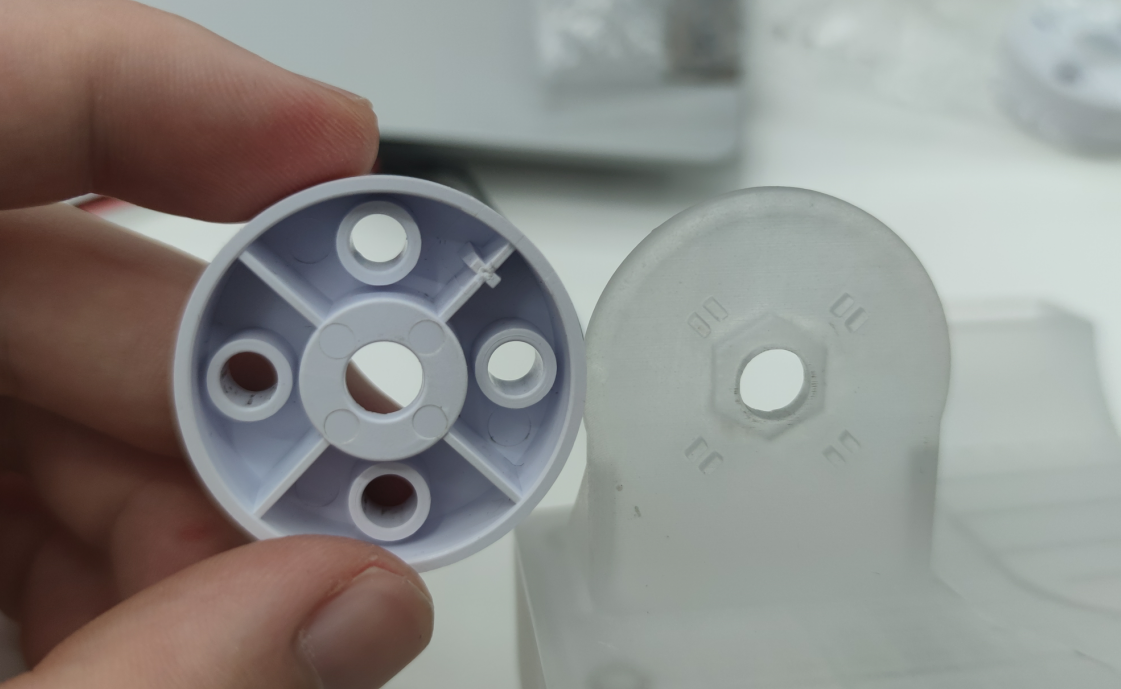
使用螺丝连接在一起

使用乐高件和相机连接在一起
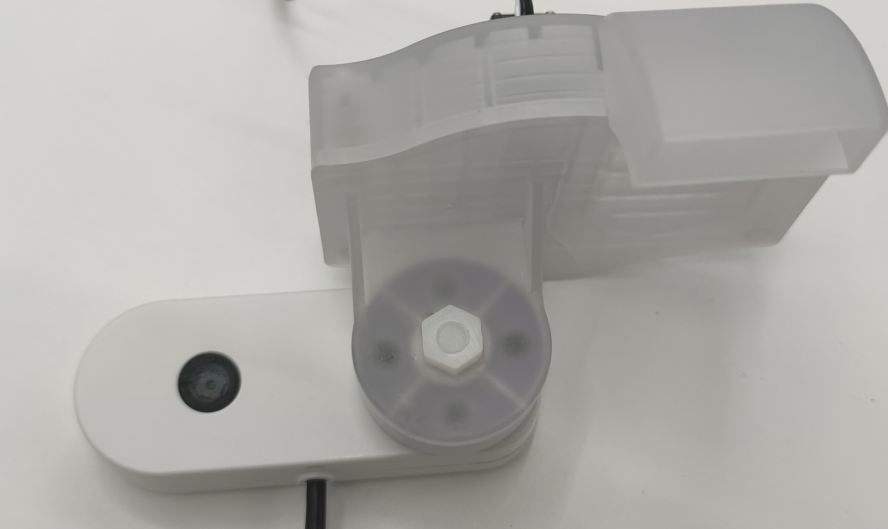
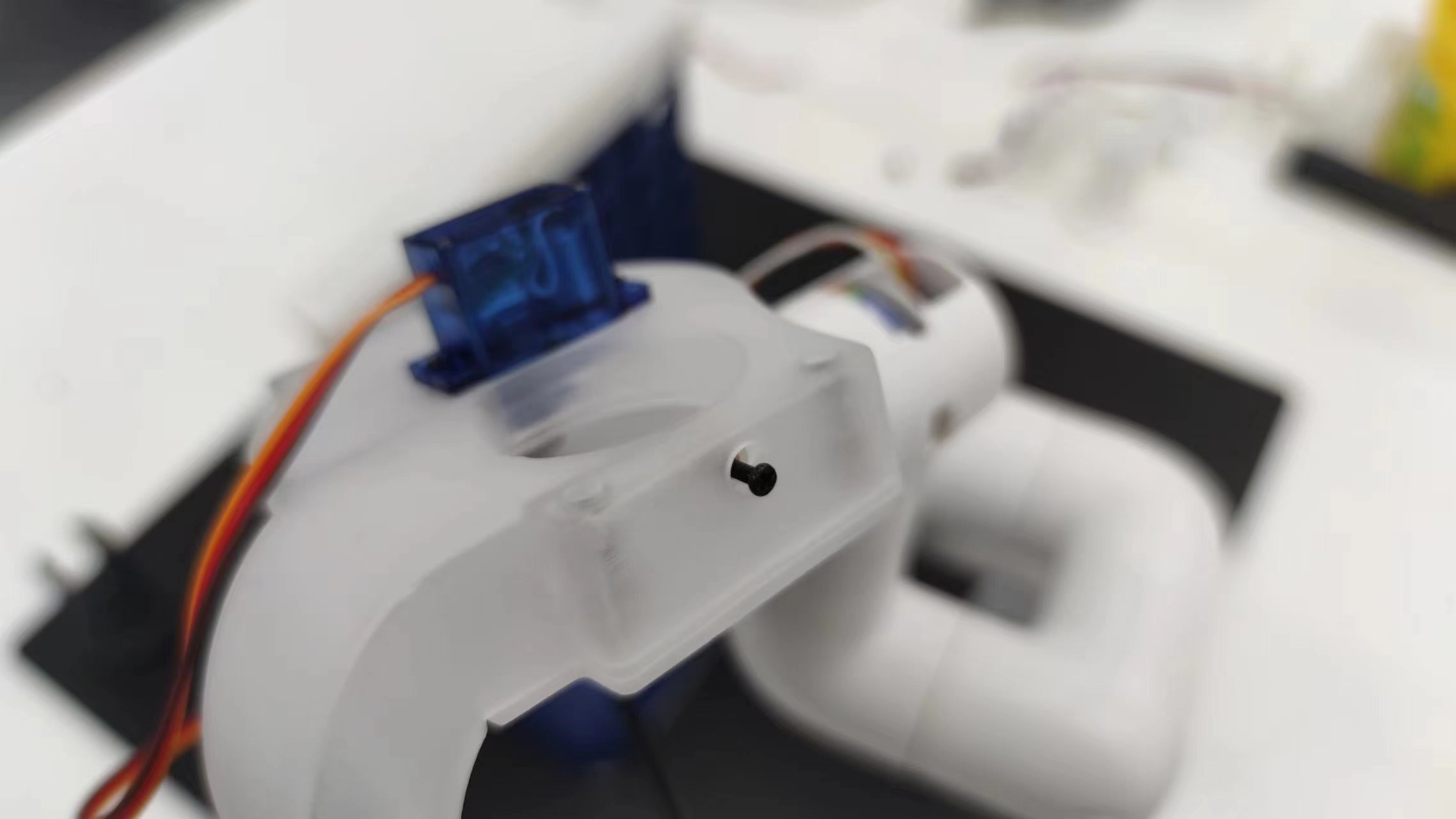
将连接好的相机模组和下棋模组安装到机械臂上 注意:区分安装方向
以机械臂的旋转标志为参照物,如图所示安装

将下棋模组的线,连接到机械臂上

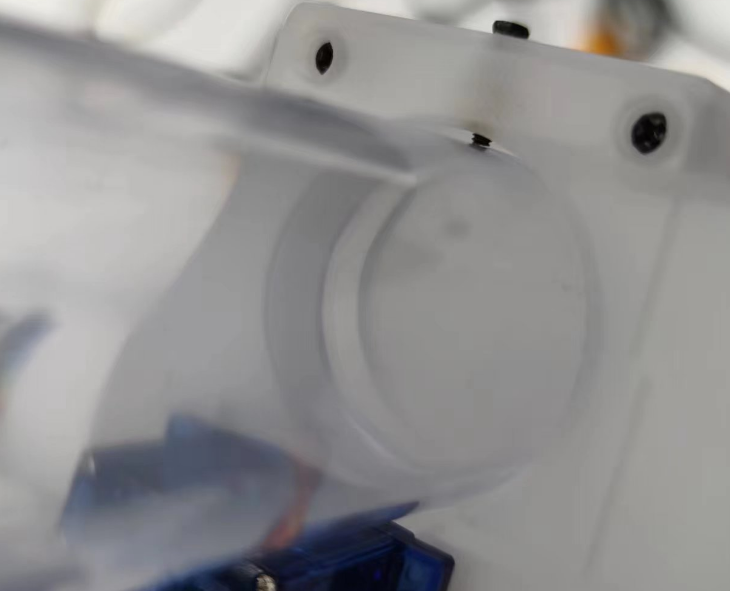
略微拧松下棋模组侧面的螺丝
插入棋桶以后拧紧
将机械臂扶正,接入电源;(机械臂上电以后关节会锁定)

至此,机械臂硬件部分安装完成
通信连接
M5版本
机械臂本体和相机需要连接到PC,其中相机使用USB连接到电脑, 机械臂需要使用一根type-c接口线连接到电脑
机械臂的连接端口

确保机械臂的屏幕上显示"Atom : OK"字样
MyCobot 280 Pi版本
Pi版本机械臂的安装流程和280类似,只是不需要通过Type-C线连接上位机了,且相机模块需要连接到机械臂上的USB端口
MyArm
MyArm的安装方式与280类似,需要注意的是相机-下棋装置与机械臂的连接位置略有变化,

同样的,相机需要插在机械臂本体后方的USB插孔上