单元测试
请确保所有单元测试均通过的情况下再开始运行程序, 可以提前排除问题
注意: 所有的测试都必须从项目根目录,通过python tests/testX.py启动
机器人运动测试
进入根目录,在此处打开终端并输入python .\tests\test1_robot.py

先选择机械臂的型号,通过数字输入
根据提示输入连接机器人的串口(输入序号即可,例如上面的输入 0, 请根据实际情况选择串口)
以下的测试均需要选择机械臂型号和串口, 根据实际情况选择即可
观察机器人的运动,如果 6 个轴都有正负角度变化,说明机械臂的通信正常;如果机器人没有动作,则说明可能通信或者固件存在问题。
相机测试
进入根目录,在此处打开终端并输入python .\tests\test2_camera.py
部分系统上相机打开速度可能有些缓慢,请耐心等待
如果相机没有图像,可以尝试修改test2_camera.py中的 cam_index, 可以尝试0,1,2,3等数字
观察相机图像是否清晰,如果图像模糊,可能需要考虑擦拭镜片。
测试完毕后在图像显示的框内按 Q 键即可退出
![]()
下棋装置测试
下棋装置是一个固定在机械臂末端的特殊结构,测试这个项目需要先安装好下棋装置是否能够正常运行 注意:运行前下棋装置的需要装入足量的棋子(>5 个)
<ReactPlayer playing controls url="/docs/connect-4/videos/test3.mp4" />
进入根目录,在此处打开终端并输入python .\tests\test3_trigger.py
观察下棋装置是否能将棋子推出装置
机器人运动点测试
这个测试需要完全安装好棋盘和机械臂,机械臂会按顺序尝试访问所有点位,你需要观察机械臂抵达的点位的精准度
进入根目录,在此处打开终端并输入python .\tests\test4_drop_point.py
如何根据结果调整点位
下棋的点位在机械臂系统中是固定的角度值,由于机械精度原因,每台机械臂可能都会存在一些误差,因此需要手动校准。下面我来演示一下如何修改校准点位。
首先打开myBlockly软件

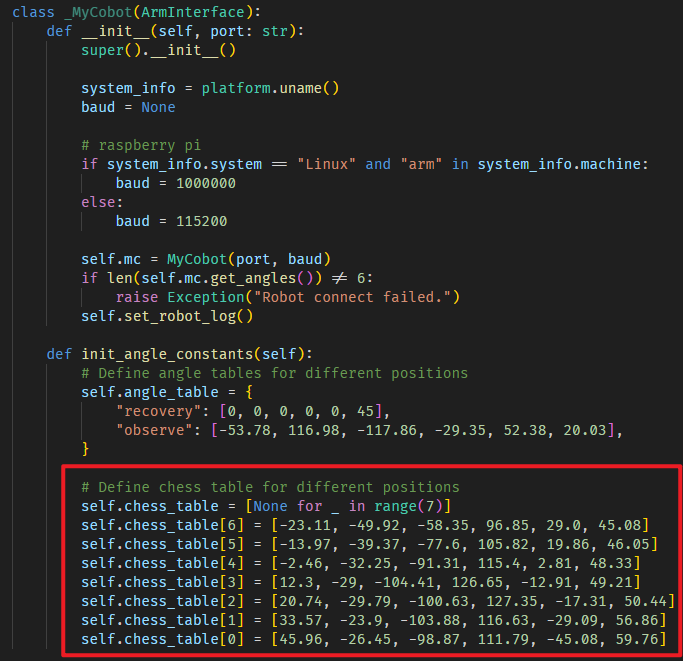
然后打开您的代码编辑器,找到core\ArmInterface.py
如果您使用的是MyCobot系列机械臂, 请定位到_MyCobot类, 如果是MyArm系列, 则定位到_MyArm类
棋盘角度的定义在self.chess_table
需要注意的是: MyCobot是6轴机械臂, MyArm是7轴机械臂; 因此MyCobot的每个棋盘点位有6个数值, 而MyArm有7个
假设您要修改第一个下棋点,也就是self.chess_table[0],先使用 myBlocky 将机械臂运动到这个位置


可以看到,机械臂的位置距离目标有些靠前了,需要调整一下
机械臂的坐标系定义为,机械臂的前方是 X 轴正方向,左边是 Y 轴正方向,上面是 Z 轴正方形
因此根据情况,我们需要降低 X 坐标


现在,读取一下角度值,然后将这个值写回到core\ArmInterface.py中
注意: chess_table的内容是角度值,不是坐标值
图像采集点测试
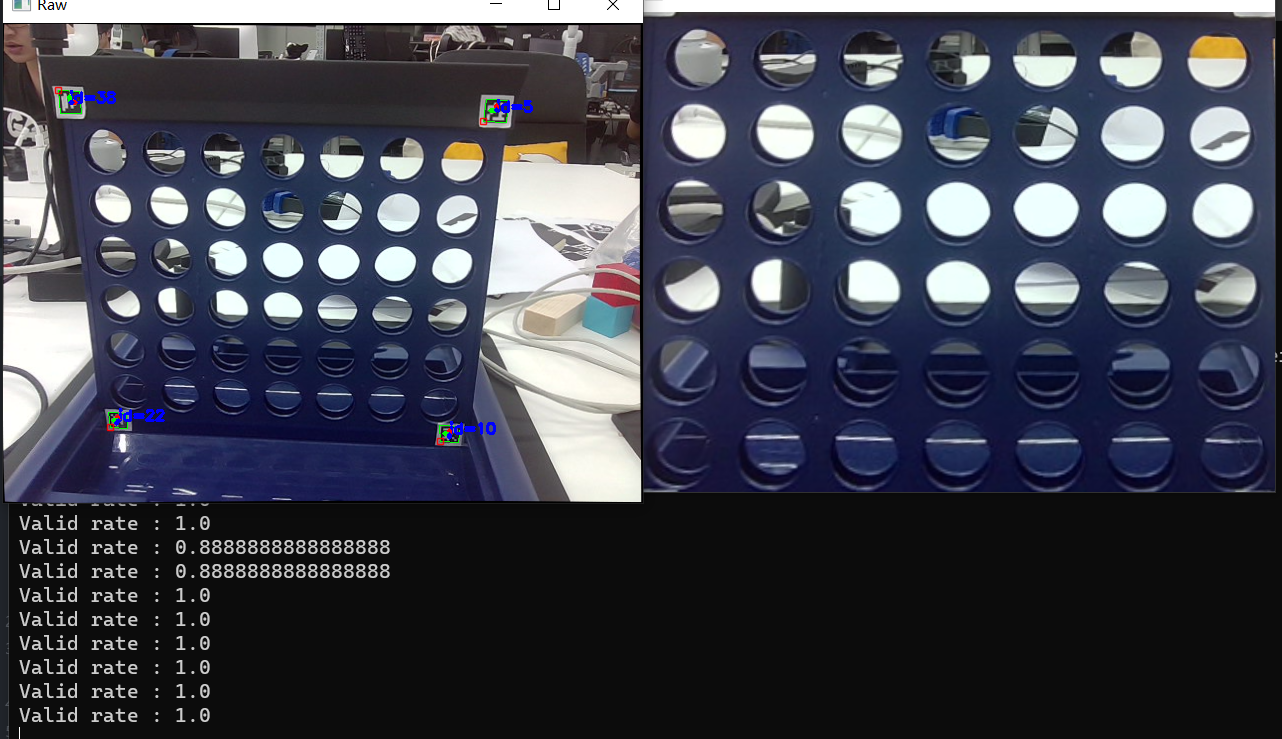
在这个测试中,机械臂会自动移动到观察姿态,如果二维码和机械臂的相对位置正确,你会看到另一个仅有棋盘的窗口
![]()
 进入根目录,在此处打开终端并输入
进入根目录,在此处打开终端并输入python .\tests\test5_detect.py
如果相机没有图像,可以尝试修改test5_detect.py中的 cam_index, 可以尝试0,1,2,3等数字
这个测试还会在命令行输出valid rate, 这表示识别率。这个数字越接近 1 越好, 1 代表每一帧都能识别到 4 个二维码, 一般来说要保证程序运行正常, 至少需要 0.8 以上的识别率