I. Simulation
We provide some static simulations and dynamic simulations to interact with the MyController S570.
1.1 Static Simulation
Static simulation here refers to interacting with the MyController S570 in the simulation using the sliding module in rviz.
To do this, open a terminal in the workspace and enter the following commands:
source devel/setup.bash # Add environment variables
roslaunch myarm_m test02.launch
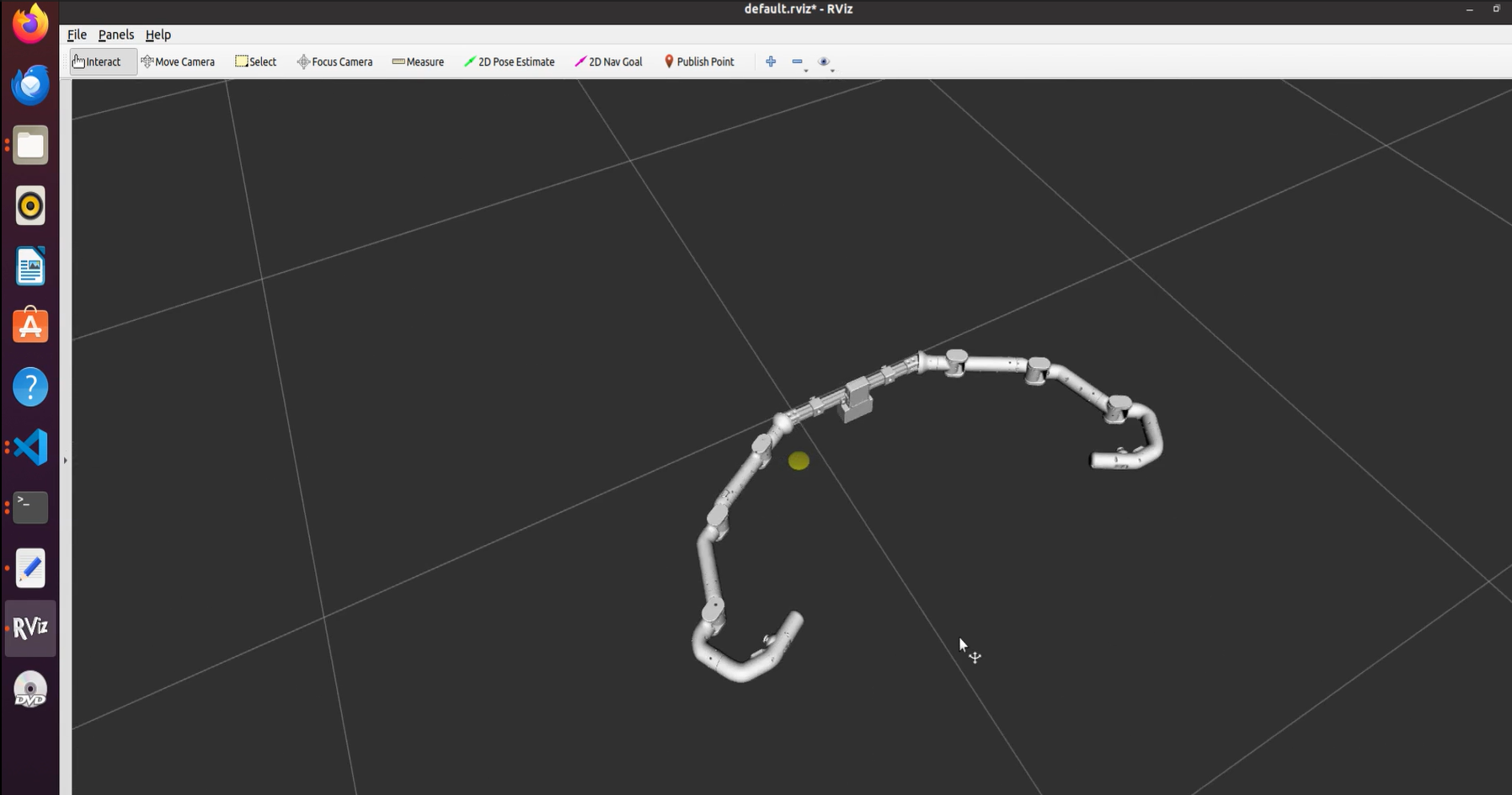
This will also open rviz and generate the simulation model of MyController S570.
1.2 Dynamic Simulation
① First turn on the switch on MyController S570, and check whether the screen displays normally (that is, the Angle of each joint and the information of the button appear).
② Connect the MyController S570 to the computer through the serial port
③ In the system, open the terminal command line and enter:
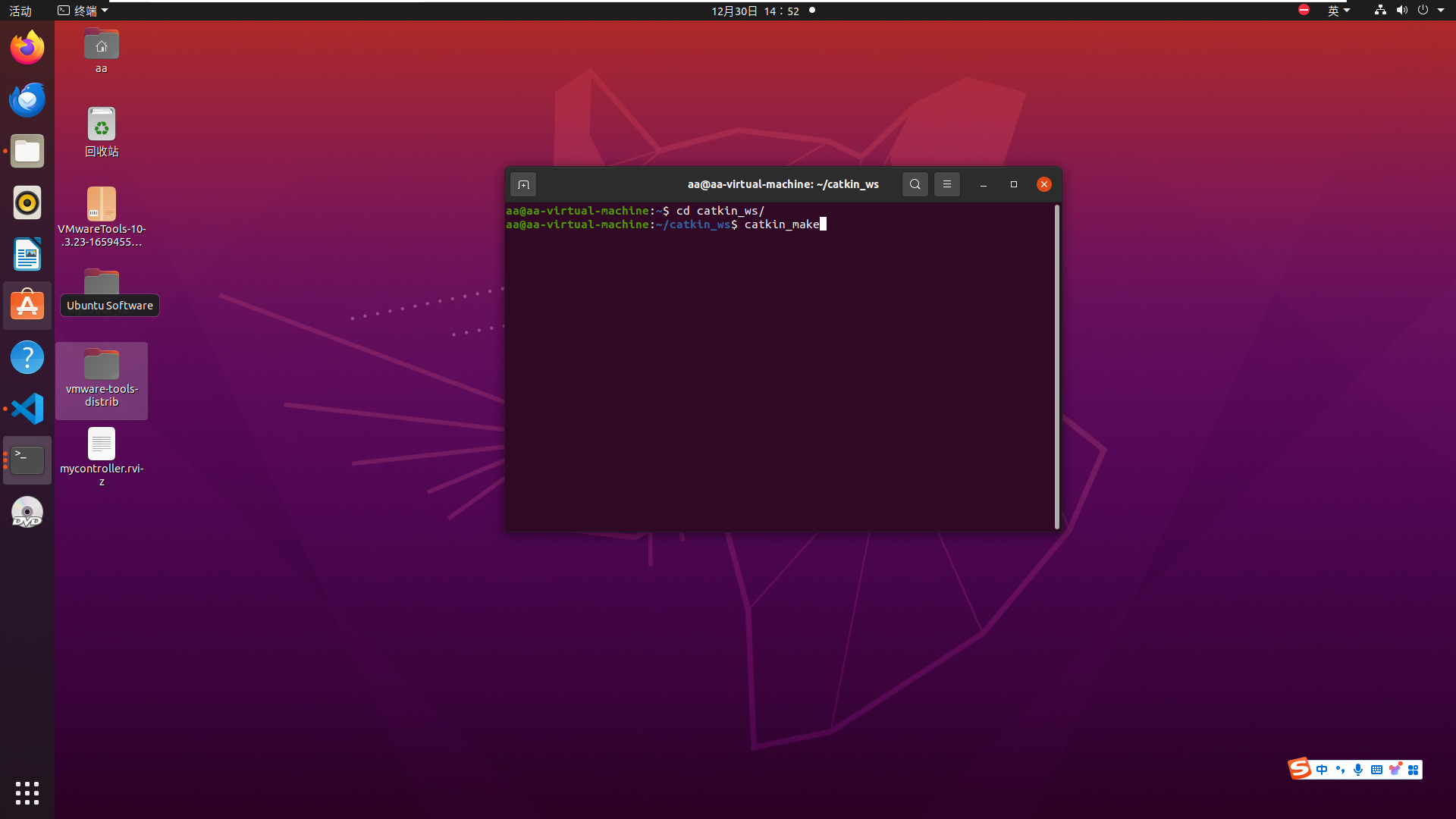
cd catkin_ws
catkin_make
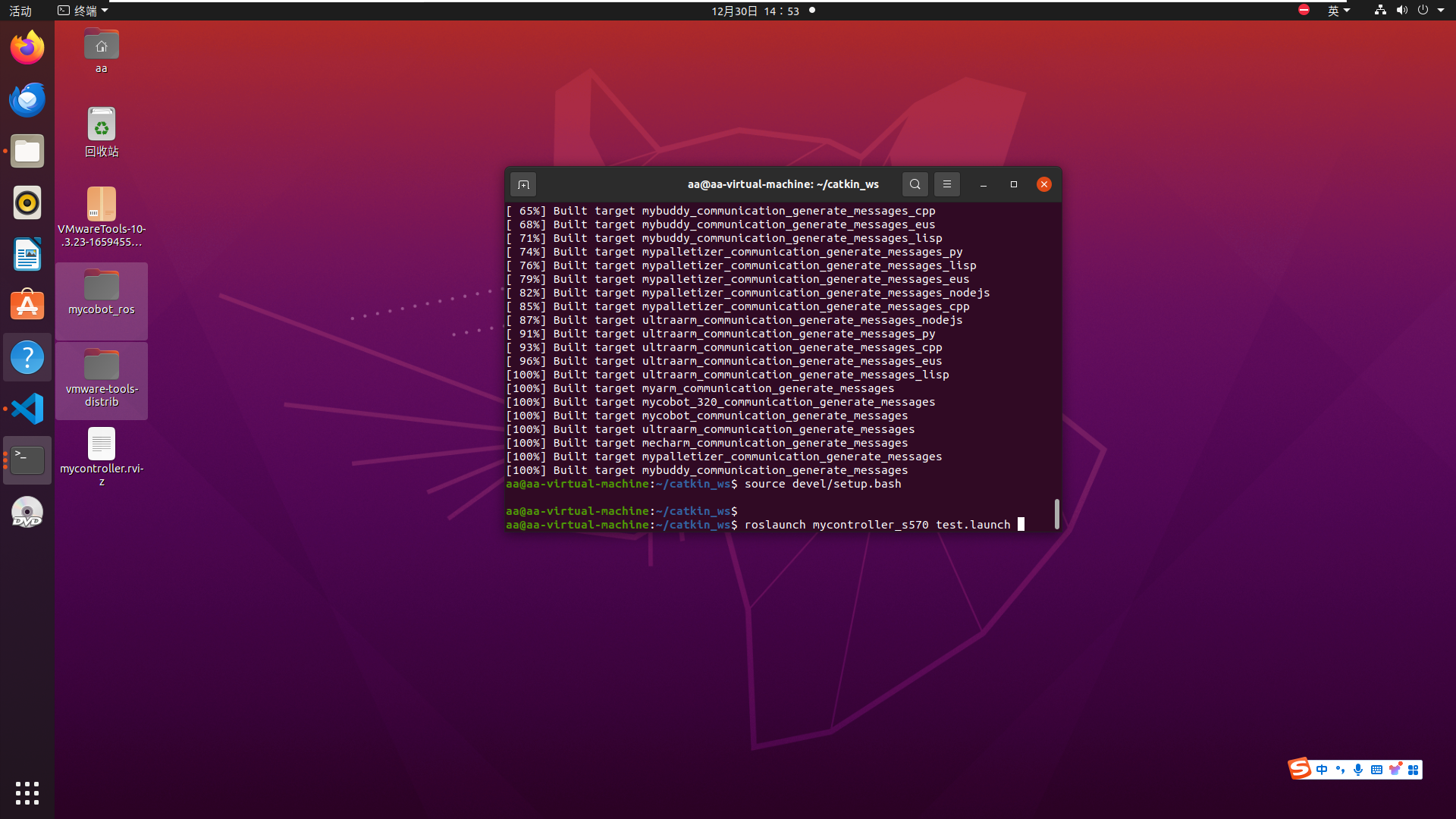
source devel/setup.bash
roslaunch mycontroller_s570 test.launch
At the same time, rviz will be opened to generate a simulation model of MyController S570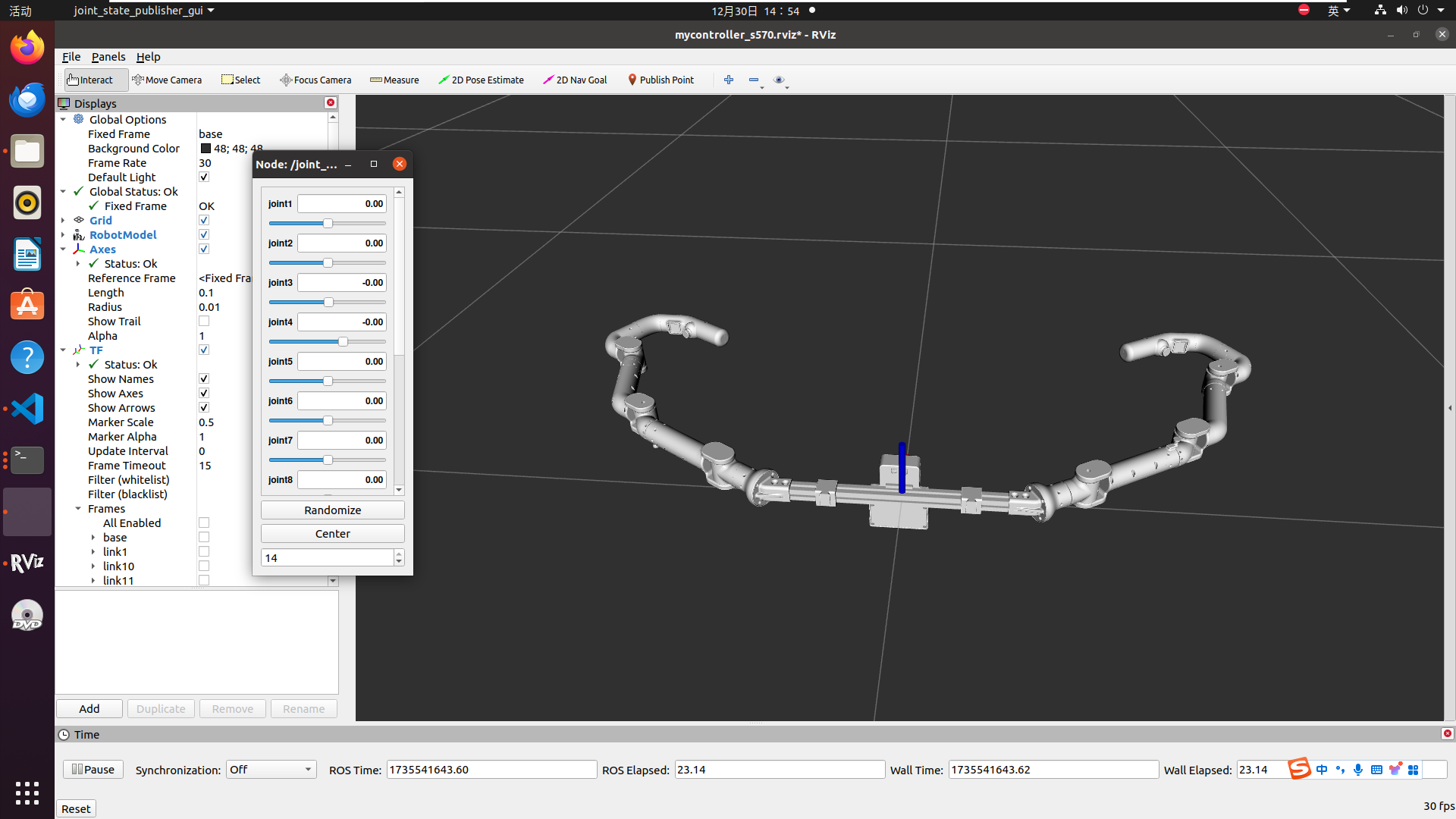
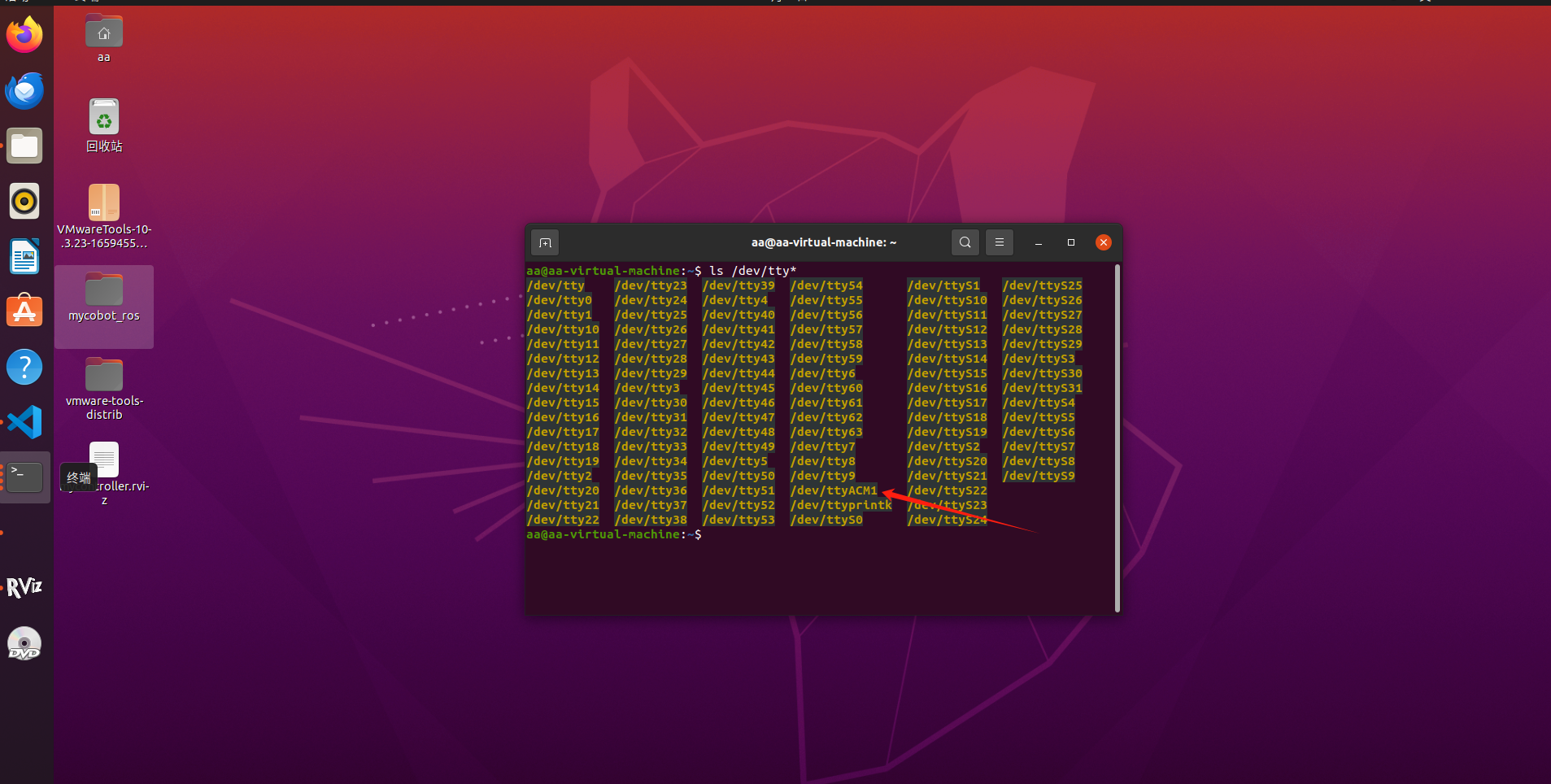
④ Create a terminal and enter: (You can view the serial port number of the S570 connecting to the system)
ls /dev/tty*
⑤ Open the script file, modify the serial port number, and save: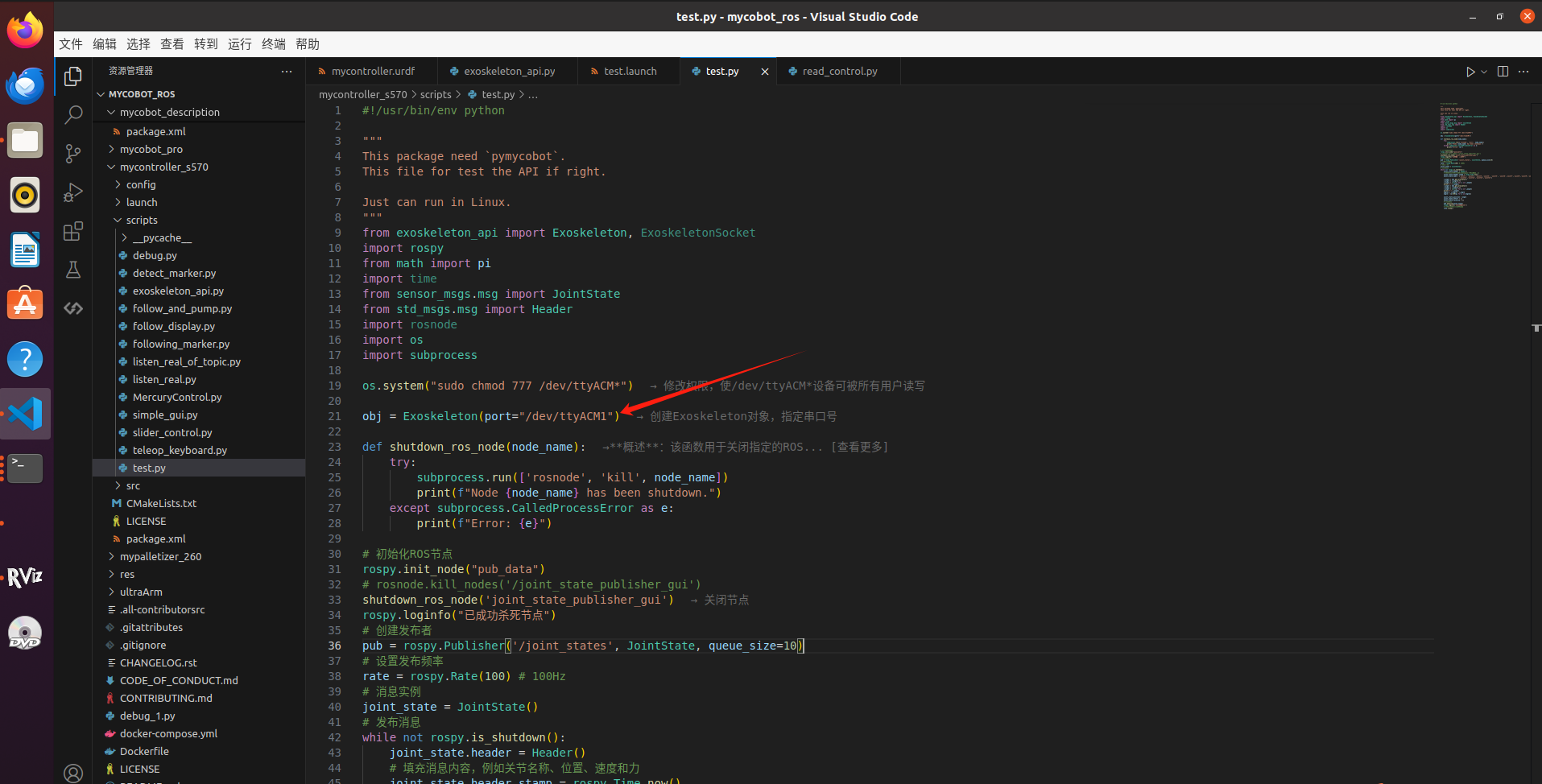
⑥ Create a new terminal and enter:
cd catkin_ws/src/mycobot_ros/mycontroller_s570/scripts
python3 test.py

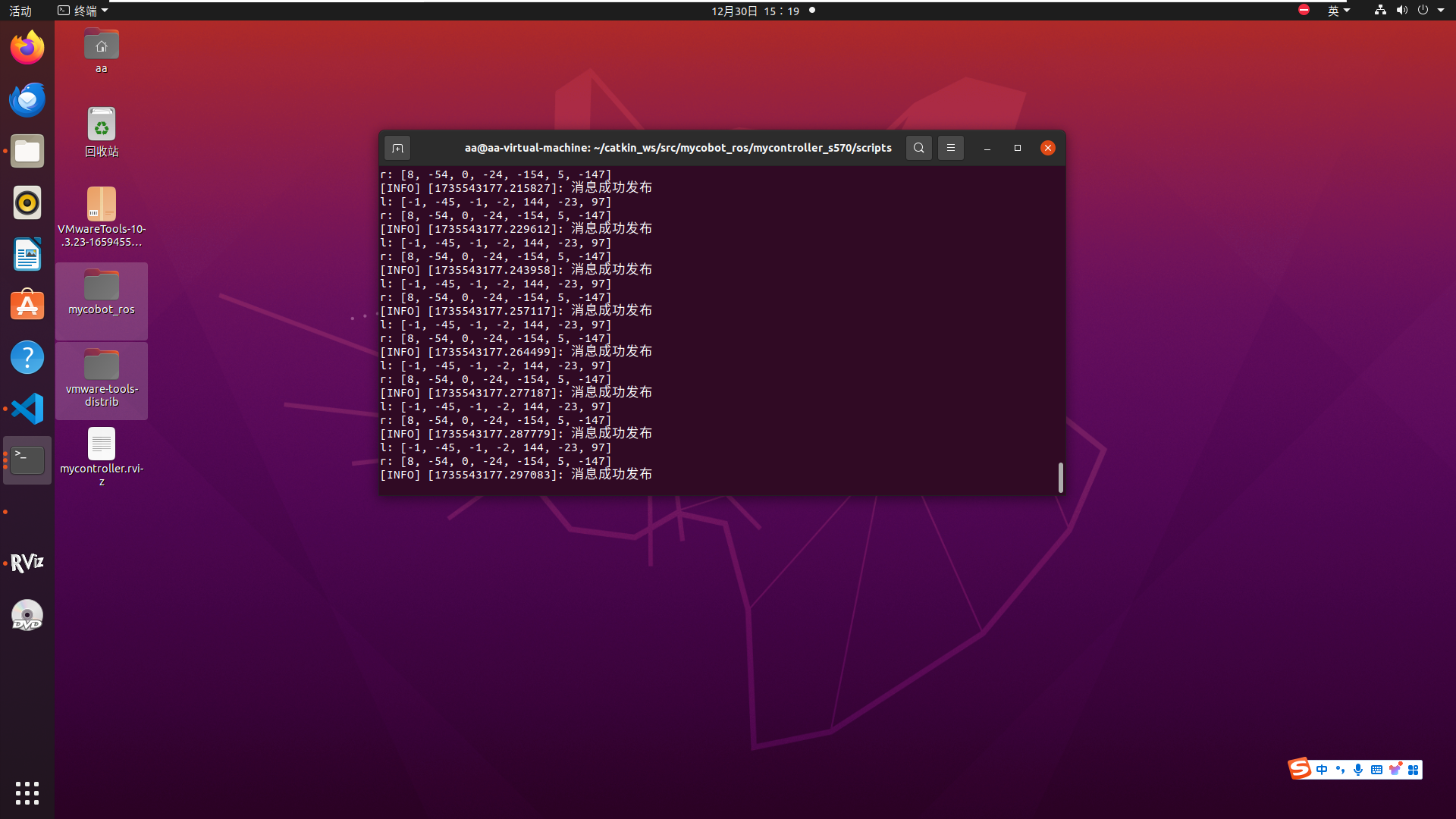
At this point, the exoskeleton successfully achieved model following motion
Effects Video: