Control multiple joints
Preparation before starting
M5Stack series: Make sure the robot is connected to the computer
Other series: Make sure the machine is normal
Learning content in this chapter
How to use myBlockly to control the movement of multiple joints of the robot
API introduction
- Method module:
Set full angle
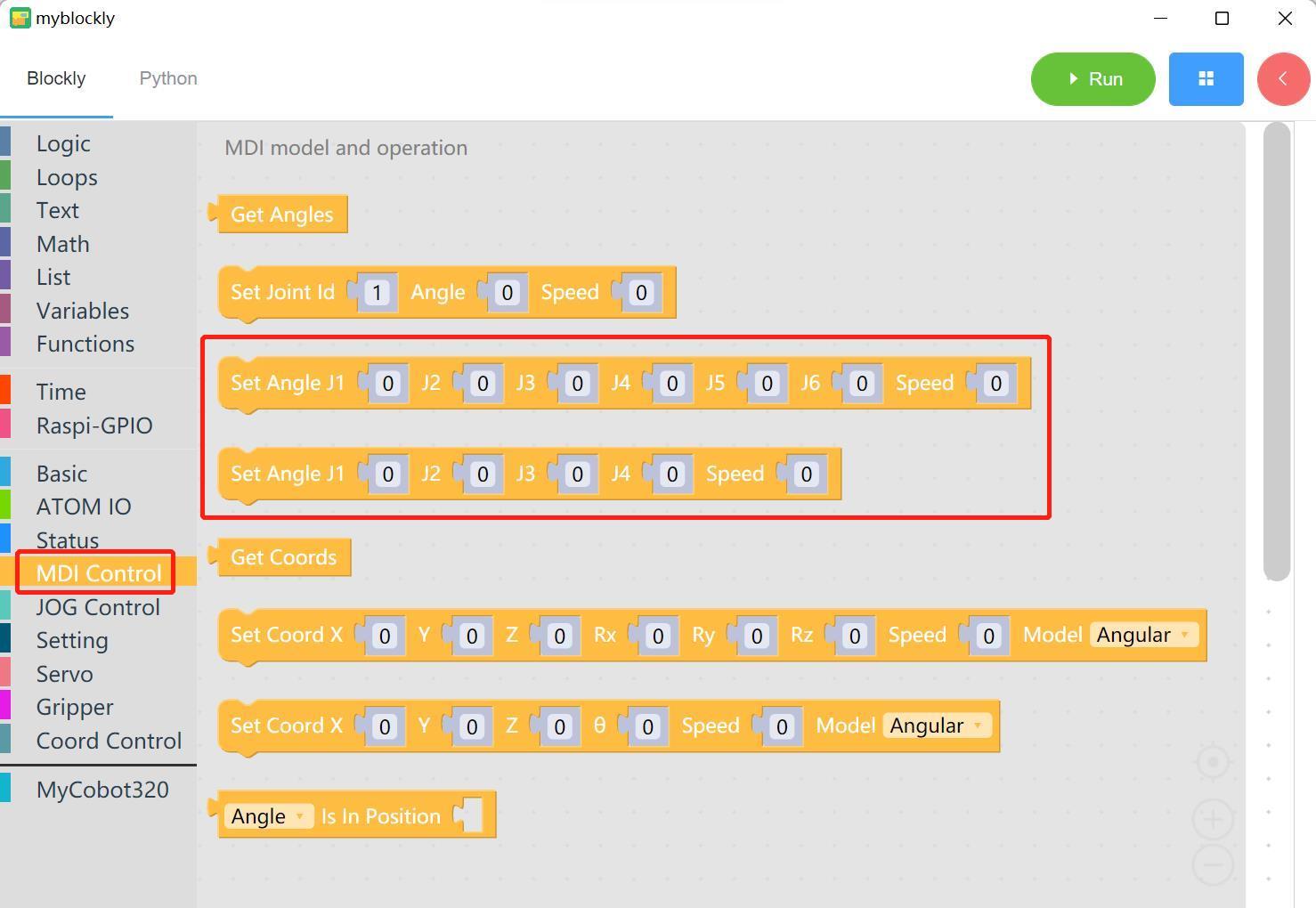

Scope of application: This module is applicable to the 6-axis myCobot 280 series, mechArm series, myCobot 320 series
Parameter introduction:
This module has two parameters that can be adjusted:
Joint angle parameters: You can set the parameters within the range of joint motion of the robot arm as needed (for details of the joint motion range, please refer to Product Introduction scetion.
Speed parameters: You can set the parameters within the range of robot arm motion speed as needed (for the maximum motion speed, please refer to Product Introduction scetion.
Purpose: Control the motion of multiple joints of the robot arm
Simple demonstration
- The graphic code is as follows:
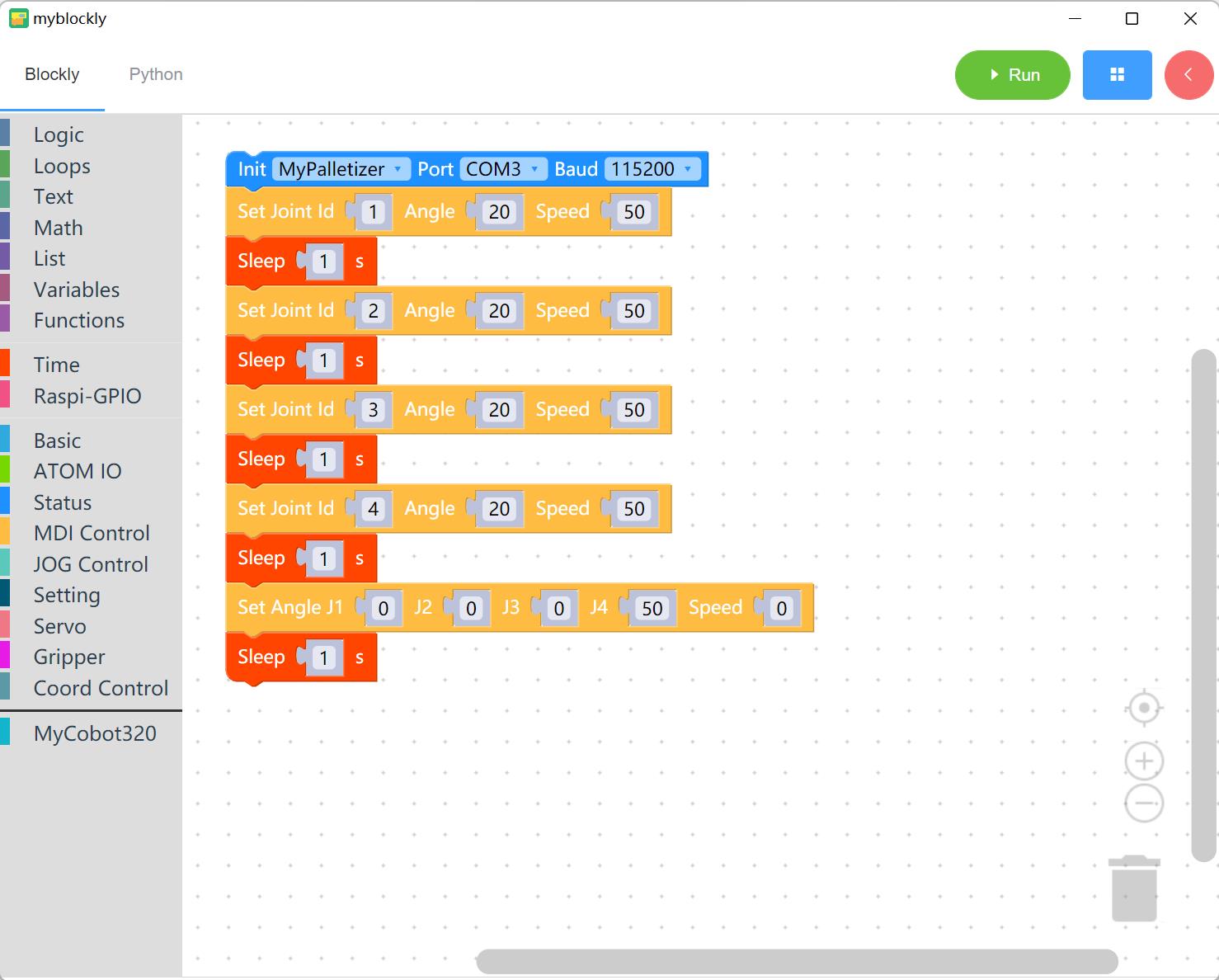
- Implementation content:
Control all joints of the robot to return to the origin. After two seconds,
Control joints 1, 2, 3 and 4 of the robot to run at a speed of 50 to 30 degrees, 30 degrees, -30 degrees and 50 degrees respectively. After two seconds,
Control all joints of the robot to return to the origin at a speed of 50. After two seconds,
Control joints 1, 2, 3 and 4 of the robot to run at a speed of 50 to -30 degrees, 0 degrees, 30 degrees and -50 degrees respectively. After two seconds, end the program.