配件相关问题
Q:模块化吸盘上箭头指向的这个凸起是否需要割掉
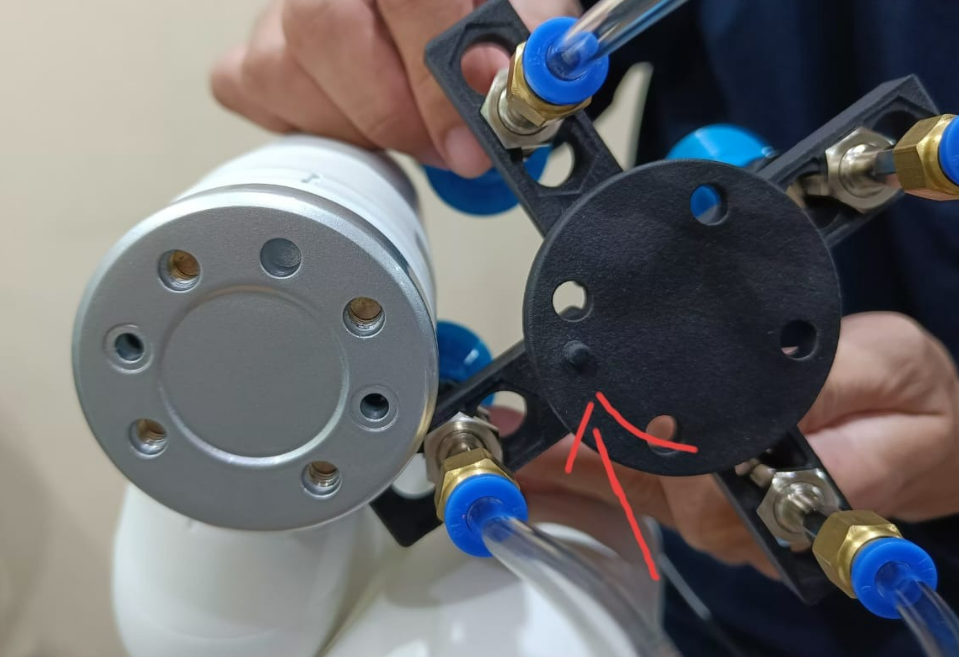
- A: 需要手动去掉的
Q:mycobot pro自适应夹爪的引脚线序与连接方式是怎样的?
mycobot自适应夹爪的引脚介绍参考下图:

夹爪连接方式:

Q:320+自适应夹爪无法控制开合怎么处理?
A:根据以下方法进行检查:
- 检查机械臂能否控制,如无法控制请参考本文档“首次使用关节验证”排查
- 使用mystudio烧录PICO1.3,Atom5.0版本固件(注意版本一致),如无法正常烧录固件,请查询本文档Q:minirobot、Atom、PICO固件下载异常排查方法是什么?
- 使用下面的指令将pymycobot更新到3.9.7版本:
pip install pymycobot==3.9.7
在机械臂能正常控制的情况下,让夹爪手动张开到最大角度,然后再接线上电,并参考下面的控制源码:
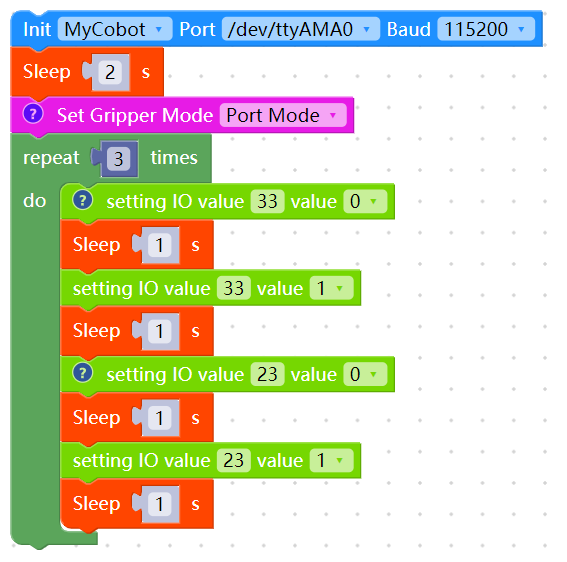
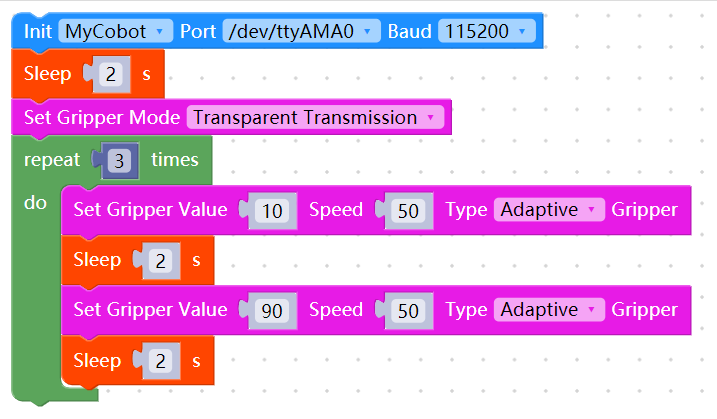
myblockly控制夹爪源码:
- IO模式(注意从透传模式切换回IO模式时,夹爪需要断电重新连接):
- 透传模式
- IO模式(注意从透传模式切换回IO模式时,夹爪需要断电重新连接):
- pyhton控制夹爪源码:
# coding=utf-8
from pymycobot import MyCobot320
import time
# 需要将串口号更改为电脑实际的串口号,将夹爪张开到最大,再运行此脚本
mc = MyCobot320('/dev/ttyAMA0',115200)
#初始化夹爪
# mc.set_init_gripper("CAG-1")
# #IO模式
# # # #夹爪全开全闭合控制代码,注意在夹爪透传切换IO模式时需要先关闭机器再重启机器人一次,才能切换回夹爪IO模式
mc.set_gripper_mode(1)#IO模式
for i in range(3):
mc.set_digital_output(33,0)#IO恢复低电平
time.sleep(1)
mc.set_digital_output(33,1)
time.sleep(1)
mc.set_digital_output(23,0)#闭合夹爪
time.sleep(1)
mc.set_digital_output(23,1)#IO恢复低电平
time.sleep(1)
# #透传模式
# mc.set_gripper_mode(0)
# time.sleep(2)#必须有延时
# for i in range(3):
# mc.set_gripper_value(26,20)
# time.sleep(1)
# mc.set_gripper_value(86,20)
# time.sleep(1)
- 注意夹爪出厂默认设置端口模式,如使用透传需要切换成透传模式,另外如果想从透传切换回端口模式需使用power_off()或者拔插夹爪接线,让夹爪重启后才能完成切换,否则切换无效,无法使用端口模式控制。
- 夹爪异常情况下,需要进行零位校准,在正常情况下,夹爪能够完全打开到最大位置,如果夹爪正常使用请忽略下面的内容,如果夹爪无法完全打开,请参考下面的源码进行零位校准:
# coding=utf-8
from pymycobot import MyCobot
import time
# You need to change the serial port number to the actual serial port number of the computer,
# open the gripper to the maximum, and then run this script.
mc = MyCobot('COM4',115200)
time.sleep(1)
mc.release_all_servos()
print("Please open the gripper manually to the maximum angle position within 5 seconds.")
time.sleep(5)
mc.power_on()
# #Tranmission mode
mc.set_gripper_mode(0)
time.sleep(1)
mc.set_gripper_calibration()
print("gripper calibrated successfully!")
可多运行几次,直到当你看到下面的信息时,即校准完成。

Q:320pro自适应夹爪使用get_gripper_value()读取的数值未能正确读取0-100,有时是255这些正常吗?pro自适应有读取角度的接口吗?
A:正常的,目前320pro自适应夹爪没有读取角度的接口,而get_gripper_value()是mycobot280的自适应夹爪专用的角度读取接口。
Q:关于夹持物体与机械臂运动之间有什么需要注意的吗?
当负载 > 500g时,速度需要低于 50%。
Q:请问有320与气缸和模块化吸盘的使用视频吗?
参考链接:https://drive.google.com/file/d/1Ei0JRjXn_YWDyYPPZeBVrAW_VzPUlx6e/view?usp=sharing
Q:请问有320与气动夹爪的使用视频吗?
参考链接:https://drive.google.com/file/d/1nL4mgUf0OYOyCJPf4d5GNkWmbkuWBoup/view?usp=sharing
Q:请问有320与pro自适应夹爪的使用视频吗?
参考链接:https://drive.google.com/file/d/1nL4mgUf0OYOyCJPf4d5GNkWmbkuWBoup/view?usp=sharing