Hardware introduction
1 Equipment List
| Equipment picture | Equipment name | Equipment quantity |
|---|---|---|
 |
ultraArm P340 | 2 |
 |
USB Camera 2D | 2 |
 |
Camera Stand | 2 |
 |
Conveyor belt | 1 |
 |
Conveyor Controller | 1 |
 |
Vertical suction pump | 2 |
 |
Quick-change servos | 2 |
 |
Kit base plate | 1 |
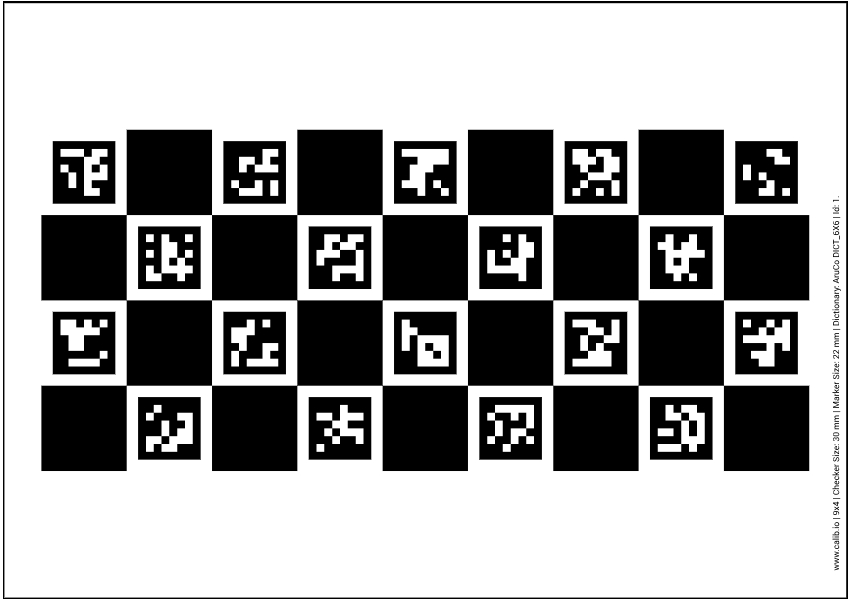 |
QR code stickers (set) | 1 |
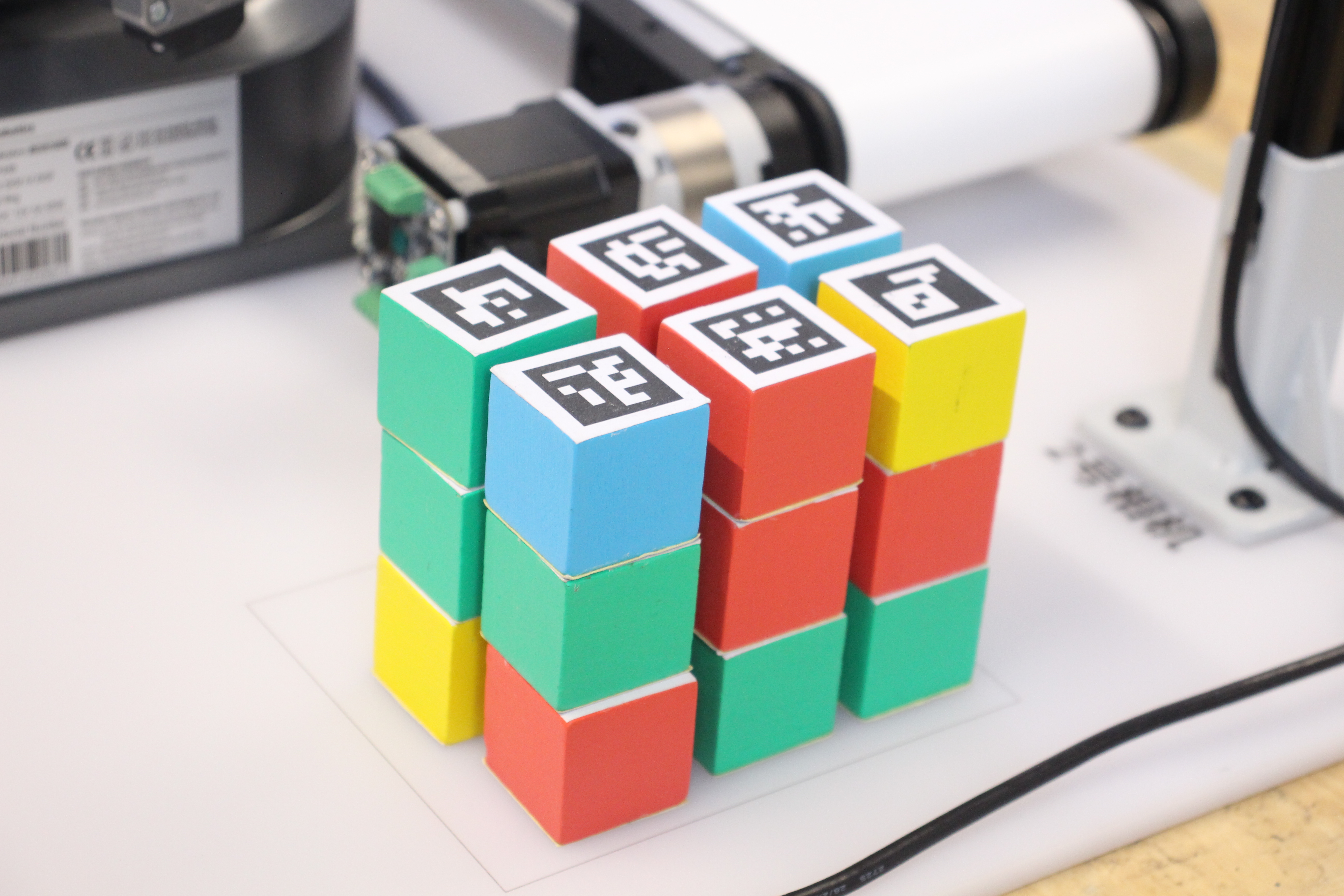 |
Identification block 3*3cm | 20 |
 |
USB docking station | 1 |
2 Equipment parameters
2.1 UltraArm P340 robotic arm parameters
| Project | Parameters |
|---|---|
| Model | ultraArm P340 |
| Degrees of freedom | 3DOF/4DOF |
| Payload | 650g |
| Working Radius | 340mm |
| Repeat positioning accuracy | ±0.1mm |
| Weight | 2.9kg |
| Service life | 5000 hours, support 7X24 hours |
| Input power supply | 12V 5A |
| Joint range | J1:-150° ~ +170°;J2:-20° ~ 90°;J3:-5° ~ 75° |
| Noise | 60 dB |
| Maximum end speed | 100mm/s |
| Power adapter | 100-240VAC 50-60Hz |
| Base interface | Laser engraving interface;Adaptive gripper interface;Suction pump interface;Burning switch |
| TCP end speed | 100 mm/s |
| Installation method | Desktop horizontal installation |
| Power module | High performance stepper motor |
| Programming methods | Elephant Luban, graphical programming myBlockly, Python, ROS1/ROS2 |
| Operating temperature | 0°~45° |
| Working environment humidity | 5%-80% |
2.2 Camera parameters
| Project | Parameters |
|---|---|
| Camera name | USB distortion-free camera |
| Image pixels | 2M 1080p |
| Supported image formats | 650g |
| Pixel size | 3.0umx3.0um |
| Maximum frame rate | MJPG: 1920 1080@30fps; YUV: 1920 1080@30fps |
| USB Protocol | USB2.0 HS/FS |
| Supported resolutions | 1280X720, 640X480, 320X240 |
| Power supply | 12V 5A |
| Supported resolutions | 1280X720, 640X480, 320X240 |
| Field of view | 110° without distortion |
| Supported systems | Windows XP/7/8/10/VISTA/SEVEN/MAC LINUX(include uvc)/Raspberry Pi/Android 4.2+ |
2.3 Conveyor belt parameters
| Project | Parameters |
|---|---|
| Motor type | Stepper motor |
| Controller | Mega 2560 Control Board |
| Power supply | DC24V |
| Conveyor belt length | 800mm |
| Maximum running speed | 0.5m/s |
| Conveyor belt width | 100mm |
| Conveyor belt height | 60mm |
| Loading capacity | 500g |