1 Windows 环境搭建
首先,需要明确的是所有案例实验都是基于python+opencv+pymycobot实现的,所以使用M5的机械臂时需要使用Mystudio在机械臂头部和底部分别烧入ATOM固件和M5Stack-basic固件。
使用环境: Windows 10 或者 Windows 11、Python3+OpenCV+pymycobot、Git
适用设备: mypalletizer 260 M5、mechArm 270 M5、myCobot 280 M5
1.1 安装Python+pymycobot
pymycobot 是一个和 myCobot 进行串口通讯的 Python 包,支持 Python2、Python3.5 及之后版本。
在使用 pymycobot控制机械臂之前需要搭建Python环境,具体搭建过程请查看 Pyhton 环境搭建 章节。
1.2 安装OpenCV
OpenCV-Python是基于Python的库,旨在解决计算机视觉问题。安装之前需确保Python环境已完成搭建。
打开一个控制台终端(快捷键Win+R,输入cmd进入终端),输入以下命令:
# 二者版本号需保持一致,这里安装4.6.0.66版本
pip install opencv-python==4.6.0.66
pip install opencv-contrib-python==4.6.0.66
# 安装pyqt5
pip install pyqt5


安装成功后,可通过下面的命令查看具体安装的版本以及安装位置:
# 也可查看其他python库 格式:pip show 库名称
pip show opencv-python
pip show opencv-contrib-python


1.3 安装Git
Git是一个开源的分布式版本控制系统,用以有效、高速的处理从很小到非常大的项目版本管理。
Git官方下载地址: https://gitforwindows.org/
点击
Download选项,开始下载Git

- 双击下载好的exe文件进行安装

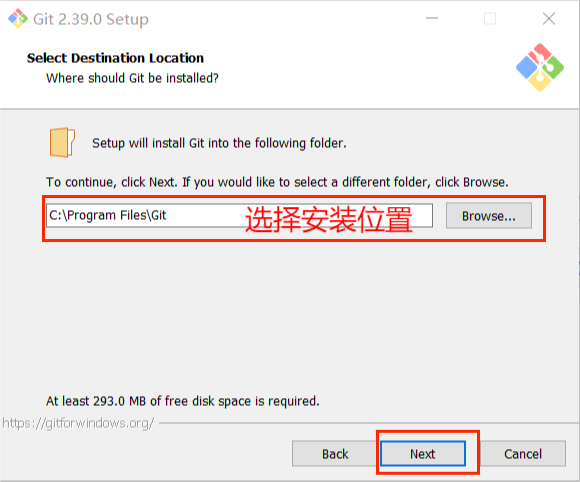
- 选择安装位置,默认是在C盘下,如果不想放在C盘下可以进行位置更换。选择好安装位置以后点击next。
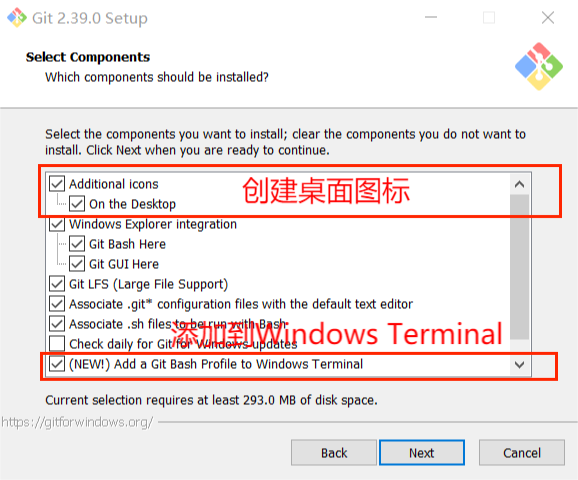
- 默认不会在桌面创建图标,并且增加了一个新的特性,将GItBash添加到Windows terminal中,建议勾选。
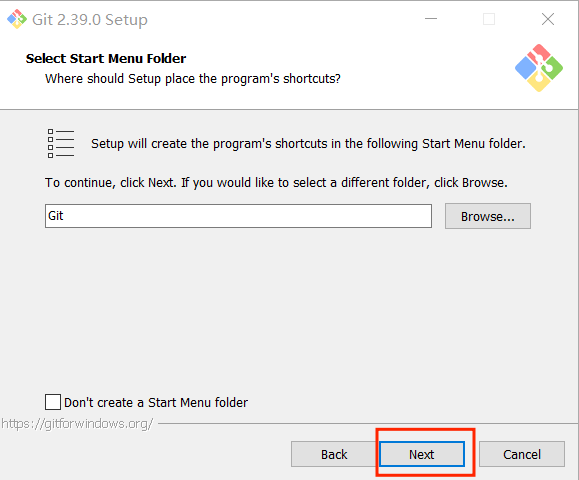
- 下一步默认,选择Next即可。
- 选择一个默认的编辑器,默认为Vim(Linux的),里面还有Notepad,我选择使用Vim

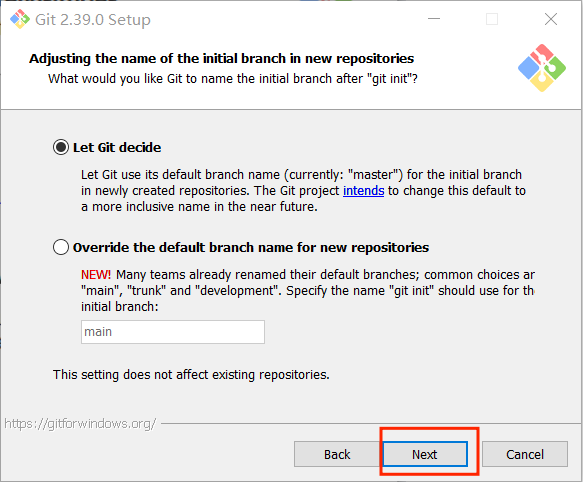
- 在Git创建分支后的默认的名字(master),如果没有特别的使用默认的设置,点击next即可。
- 下一步默认,选择Next即可。
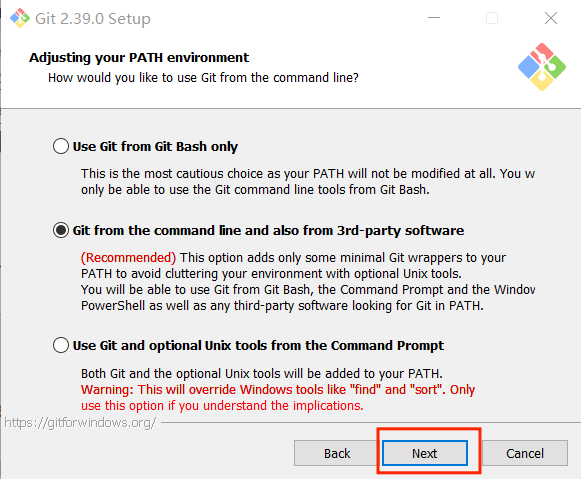
- 下一步默认,选择Next即可。
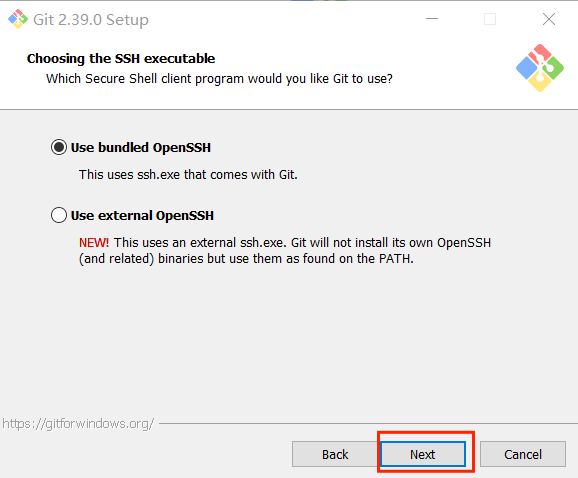
- 下一步默认,选择Next即可。

- 下一步默认,选择Next即可。
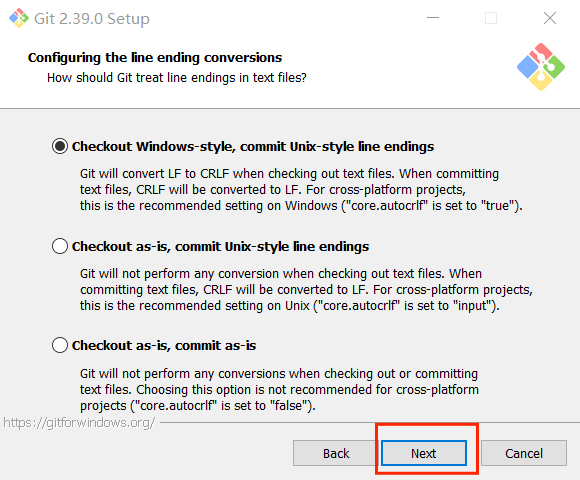
- 下一步默认,选择Next即可。

- 下一步默认,选择Next即可。
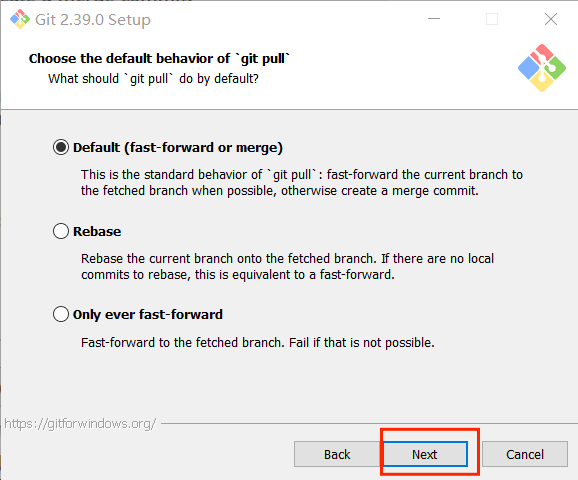
- 下一步默认,选择Next即可。

- 下一步默认,选择Next即可。

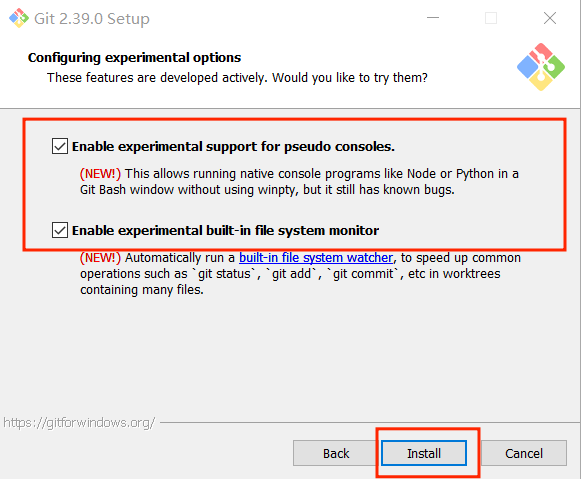
- 额外的配置选项,这里面默认都没有选,可以将这两个选框勾选上,支持(node、python虽然还有bug)然后选择install。
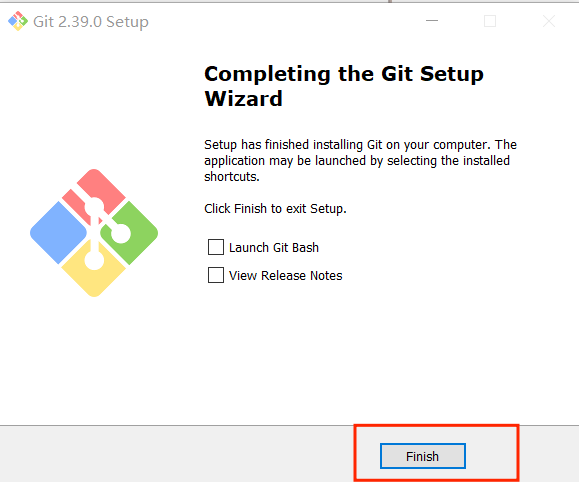
- 安装完成后,点击FInish安装完成。
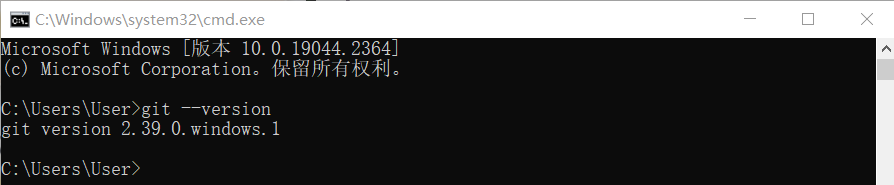
检查
打开一个控制台终端(快捷键Win+R,输入cmd进入终端),输入以下命令查看Git版本信息:
git --version
在后续下载 aikit 包需要用到git,git 的使用可以参考下面链接:
1.4 aikit_V2 安装
aikit_V2 是 ElephantRobotics 推出的,适配旗下桌面机械臂的人工智能套装V2.0 程序包。
项目地址:https://github.com/elephantrobotics/aikit_V2
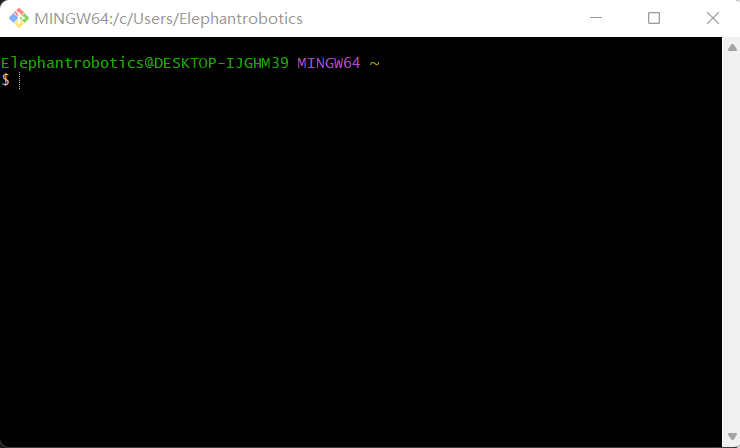
- 1 双击桌面
Git Bash图标,进入Git终端。

- 2 在Git终端输入以下命令:
cd Desktop
git clone https://github.com/elephantrobotics/aikit_V2.git


然后桌面会出现 aikit_V2 文件夹。

至此,Windows环境搭建完成。
2 树莓派环境搭建
由于树莓派版本已经内置Ubuntu 20.04系统,所以无需搭建环境。
- 适用设备: myCobot 280 Pi、mechArm 270 Pi
2.1 安装OpenCV依赖库
打开一个控制台终端(快捷键Ctrl+Alt+T),输入命令:
# 二者版本号需保持一致,这里安装4.6.0.66版本
pip install opencv-python==4.6.0.66
pip install opencv-contrib-python==4.6.0.66
2.2 aikit_V2 安装
aikit_V2 是 ElephantRobotics 推出的,适配旗下桌面机械臂的人工智能套装V2.0 程序包。
适用设备:myCobot 280 Pi、mechArm 270 Pi、myPalletizer 260 Pi、myArm 300 Pi
项目地址:https://github.com/elephantrobotics/aikit_V2
- 1 打开一个控制台终端(快捷键Ctrl+Alt+T),输入命令:
git clone https://github.com/elephantrobotics/aikit_V2.git
- 2 然后在主目录
/home/er下,会出现aikit_V2这个文件夹。
至此,aikit_V2 完成安装。
3 RISCV机型环境搭建
为便于版本管理,这里使用python虚拟环境运行程序。所有的命令执行均在虚拟环境下操作运行。
3.1 创建虚拟环境
打开一个控制台终端(快捷键Ctrl+Alt+T),输入下面命令:
注意: 这里所有的命令执行均在虚拟环境下操作运行
sudo apt install python3-virtualenv
# 创建虚拟环境,名称为elephant-venv
virtualenv elephant-venv
# 激活虚拟环境
source elephant-venv/bin/activate
3.2 安装OpenCV依赖项
sudo apt install libopenblas-dev
3.3 安装aikit_V2
aikit_V2 是 ElephantRobotics 推出的,适配旗下桌面机械臂的人工智能套装V2.0 程序包。
适用设备:myCobot 280 RISCV
项目地址:https://github.com/elephantrobotics/aikit_V2
打开一个控制台终端(快捷键Ctrl+Alt+T),输入下面命令:
git clone https://github.com/elephantrobotics/aikit_V2.git
完成操作后,在主目录 /home/er 下,会出现 aikit_V2 这个文件夹。