人工智能套装3D版

1 产品简介
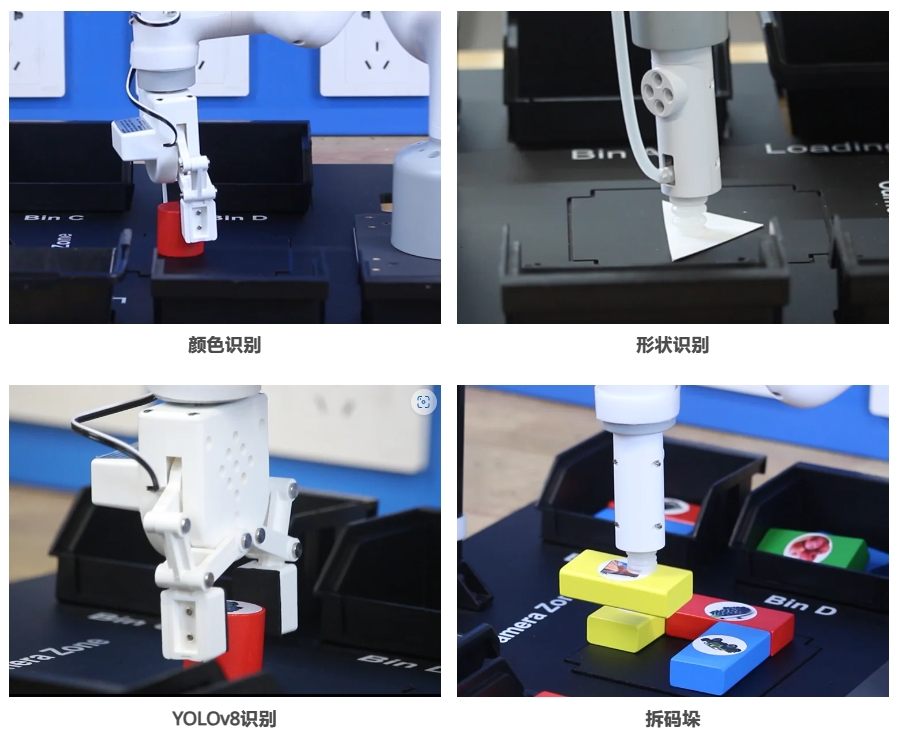
人工智能套装3D版,搭配3D摄像头进行三维识别定位,无需繁杂的位置标定,四种识别算法与两大应用,开源代码基于python平台,可通过开发软件实现机械臂的控制,简单易学,能够快速入门学习人工智能基础知识,启发创新思维,领悟开源创意文化。
本套装扩展性好,开放性高,可以被用于多种用途。可易用高校实训平台、机器人学科搭建、机器人实验室或个人学习与使用。
2 产品性能:
- 3D相机几乎能够满足你对大部分场景的抓取需求,智能抓取,支持无序抓取。
- 2种末端执行器:myCobot 自适应夹爪和myCobot 垂直吸泵 V2.0。

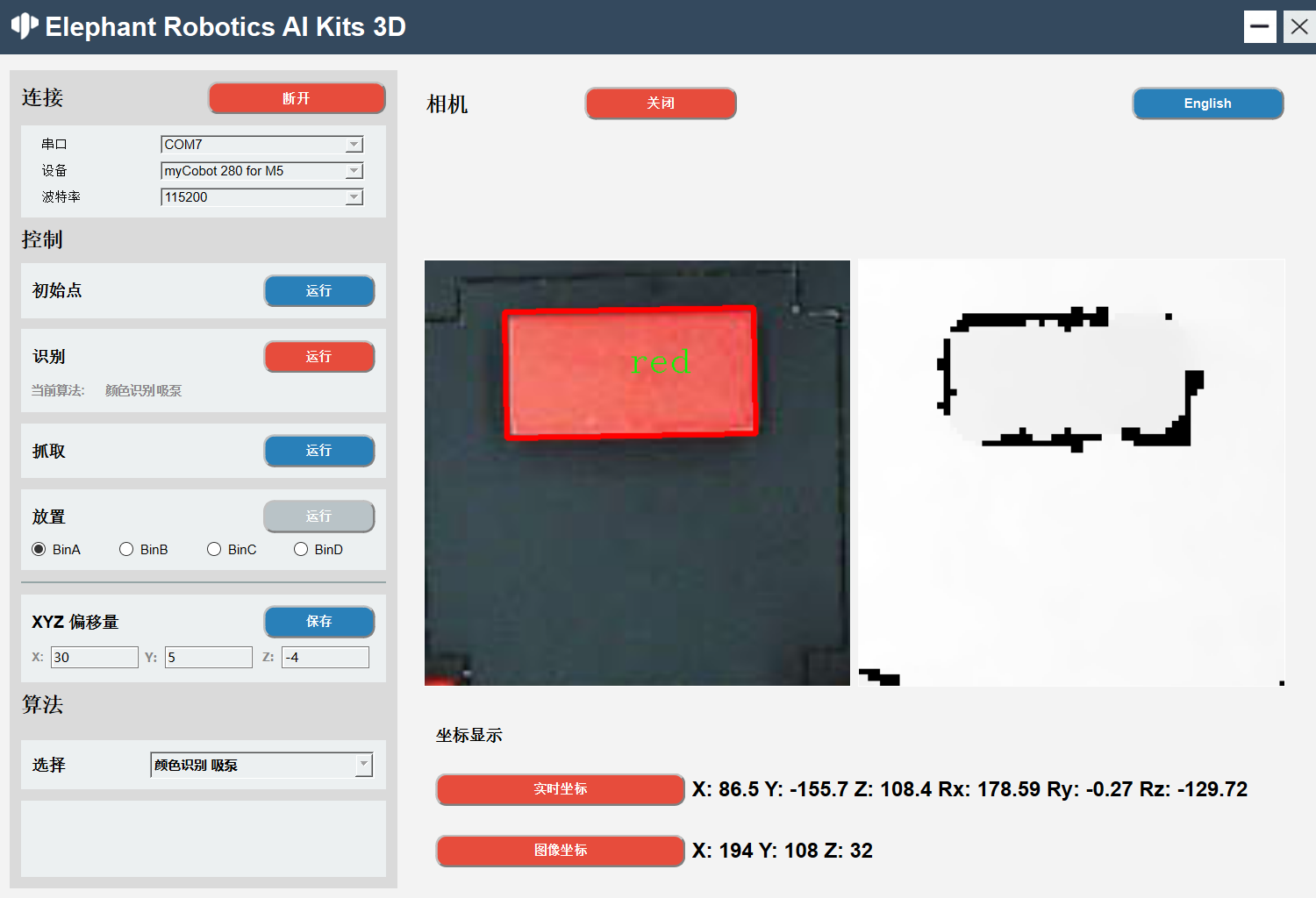
- 可视化软件:支持可视化软件操作,提供自定义简单操作方法,快速开启人工智能套装。
3 产品参数
| 指标 | 参数 |
|---|---|
| 名称 | 人工智能套装3D版 |
| 整体尺寸 | 510x369.2x8mm |
| 末端配件 | myCobot 吸泵V2.0 |
| 3D相机 | *1 |
| 套装配件 | 4色(红绿黄蓝) 木块,各 5个,长 6cm 宽 3cm 高 1.5cm 的木块,4色(红绿黄蓝) 木块,名 5个直径 3cm 高 3cm 的圆柱体木块,白色形状卡片,各两张; 正方形4x4cm; 等腰三角形,长方形3.5x7cm; 圆形直径 4cm,直径 3cm 图片贴纸15 张 |
| 载重 | 200g |
| 指标 | 参数 |
|---|---|
| 名称 | 奥比中光Deeyea |
| Baseline | 40mm |
| 深度距离 | 0.25-1.5m |
| 功耗 | 平均功耗<2.5W,待机功耗<1.5W峰值功耗<5W,峰值电流小于1000mA |
| 深度图分辨率 | USB2.0模式:1280×800@7fos; 640×400@30fos USB3.0模式: 1280×800@30fos; 640×400@60fos |
| 彩色图分辨率 | USB2.0模式: 1280720@7fps; 640x480@30fps USB3.0模式: 19201080@30fps; 1280720@30fps; 640x480@30fos; 640480@60fps |
| 精度 | 1m:+5mm |
| 深度视场角FOV | H67.9°V45.3° |
| 彩色视场角FOV | H71.5° V56.7°D84° |
| 适用场景 | 室内 |
| 数据传输 | USB3.0 Type-c |
| 支持操作系统 | Android/Linux/Windows7/8/10 |
| 供电方式 | USB3.0 Type-C |
| 安全性 | Class1 |
| 尺寸 | 68.60x22.30x14.80mm |
| 指标 | 参数 |
|---|---|
| 名称 | Realsense D435 |
| RGB摄像头 | 分辨率:1920 x 1080像素;帧率:最高30帧/秒 |
| 深度摄像头 | 分辨率:1280 x 720像素;帧率:最高30帧/秒 |
| 深度感知 | 最大测距范围:0.2米至10米;深度精度:±1%(在1米范围内) |
| 视场角度 | RGB摄像头:69.4°(水平)x 42.5°(垂直)x 77°(对角线) 深度摄像头:87°(水平)x 58°(垂直)x 95°(对角线) |
| 运动跟踪 | 最大可跟踪点数:不超过100万个点 最大可跟踪手势数:15个手势 |
| 接口 | USB3.0 Type-c |
| 其他特性 | 支持红外线投影和红外线模式、支持深度图像和彩色图像的对齐、内置加速度计和陀螺仪 |
4 产品系统组成结构
- 套装组件
