套装搭建
安装视频
1 安装底座
1.1 根据不同机型选择不同的底座类型安装
- mechArm 270 M5版本机械臂,先使用M3X38 沉头内六角螺丝安装机械臂底座。

- myCobot 280 M5和myCobot 280 PI版本机械臂,先使用M4X14 沉头内六角螺丝安装机械臂底座。

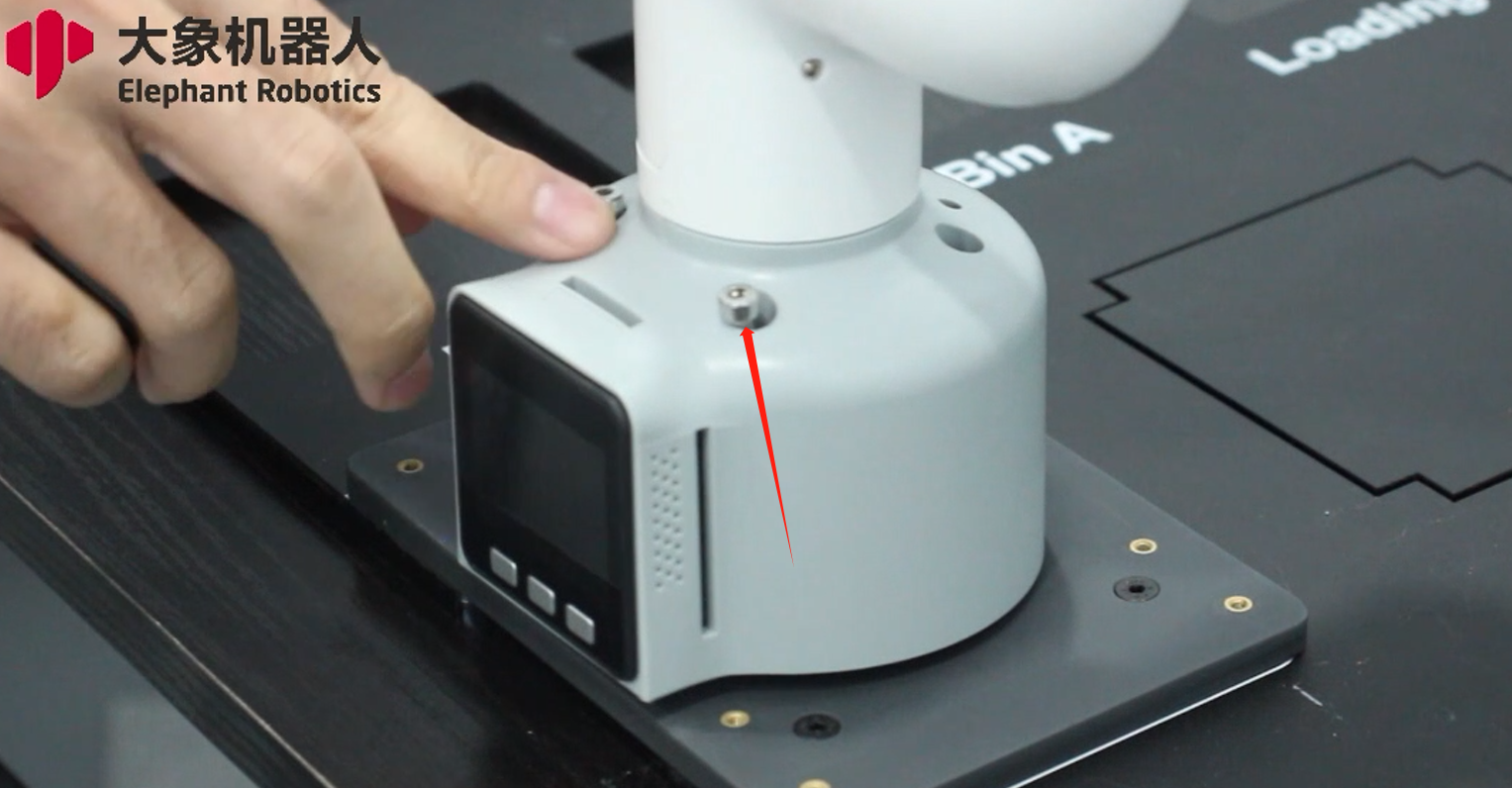
1.2 以myCobot 280 M5机器为例,机械臂对准孔位,使用M4x35螺丝固定。

2 安装摄像头支架
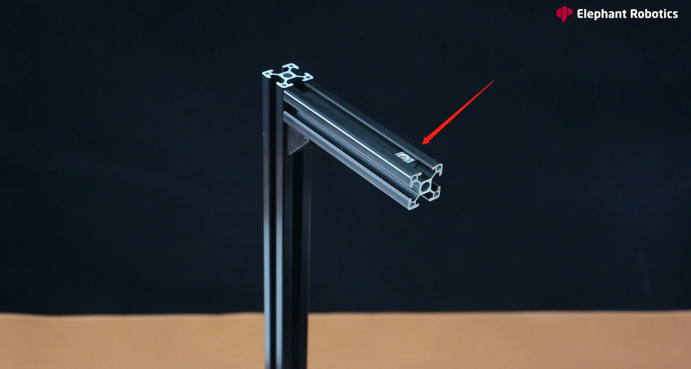
2.1 T型螺母放进长型材凹槽处,使用M5x8盘头内六角螺丝安装角码,依次安装3个。
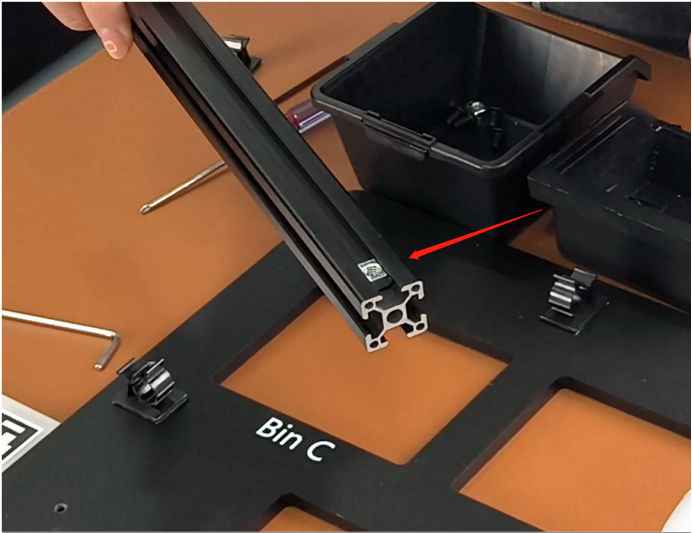
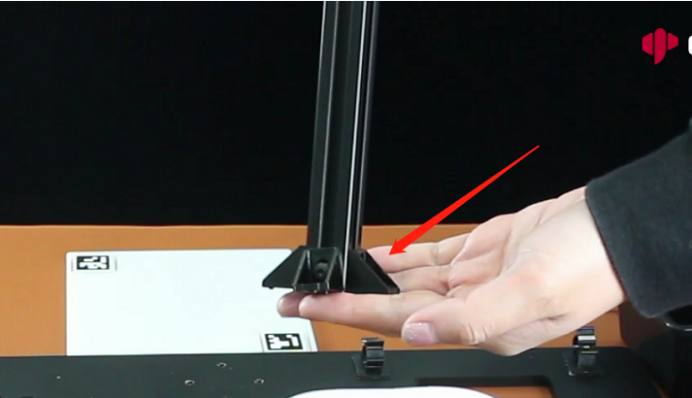
2.2 重复上述,安装短型材角码。
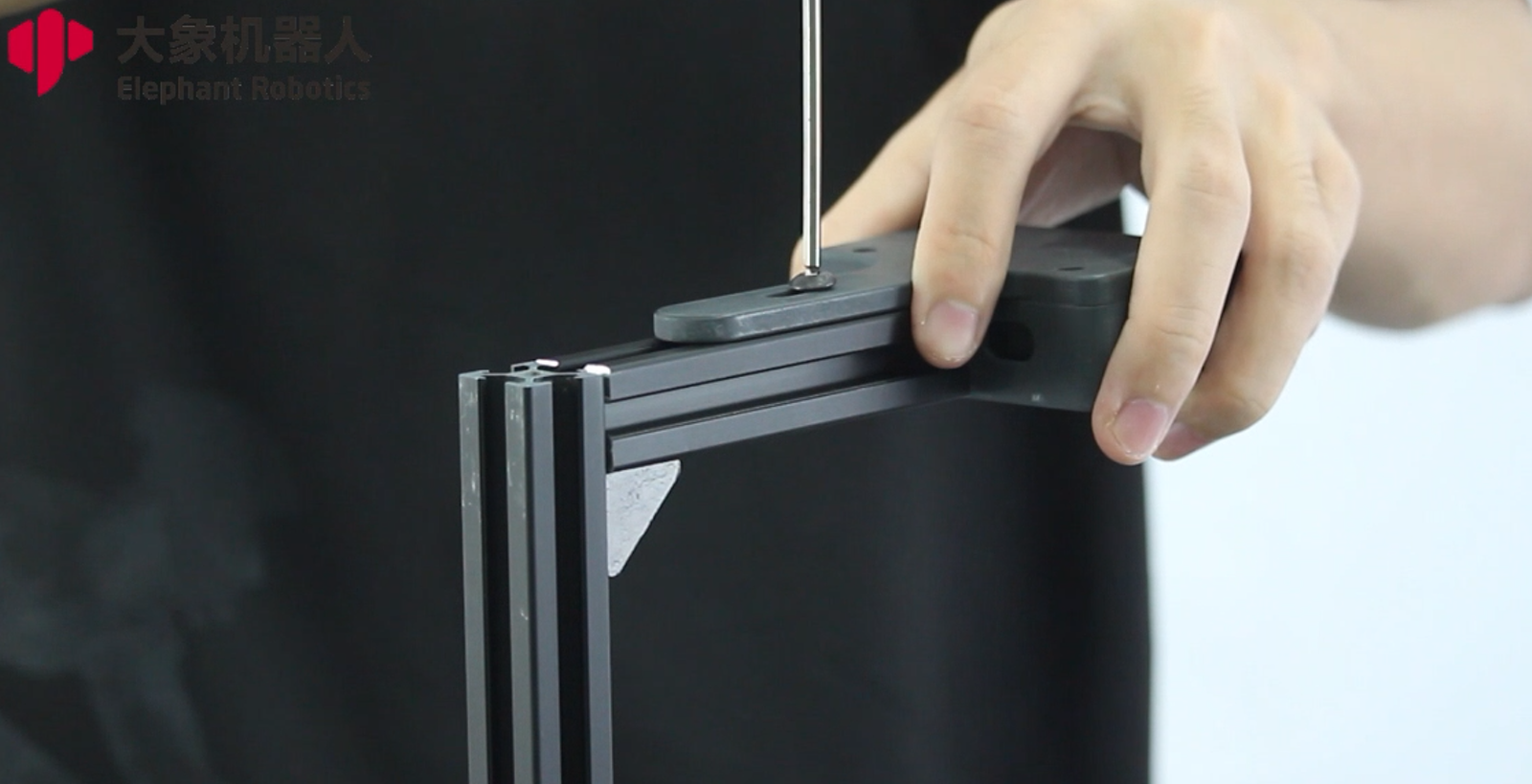
2.3 T型螺母放进型材凹槽处,使用M5x8盘头内六角螺丝将短型材安装在长型材上。

2.4 将组装好的摄像头支架对准亚克力板孔位,使用M5x10盘头内六角螺丝固定,注意先将3个螺丝简单固定,之后在依次拧紧螺丝,避免孔位偏离。
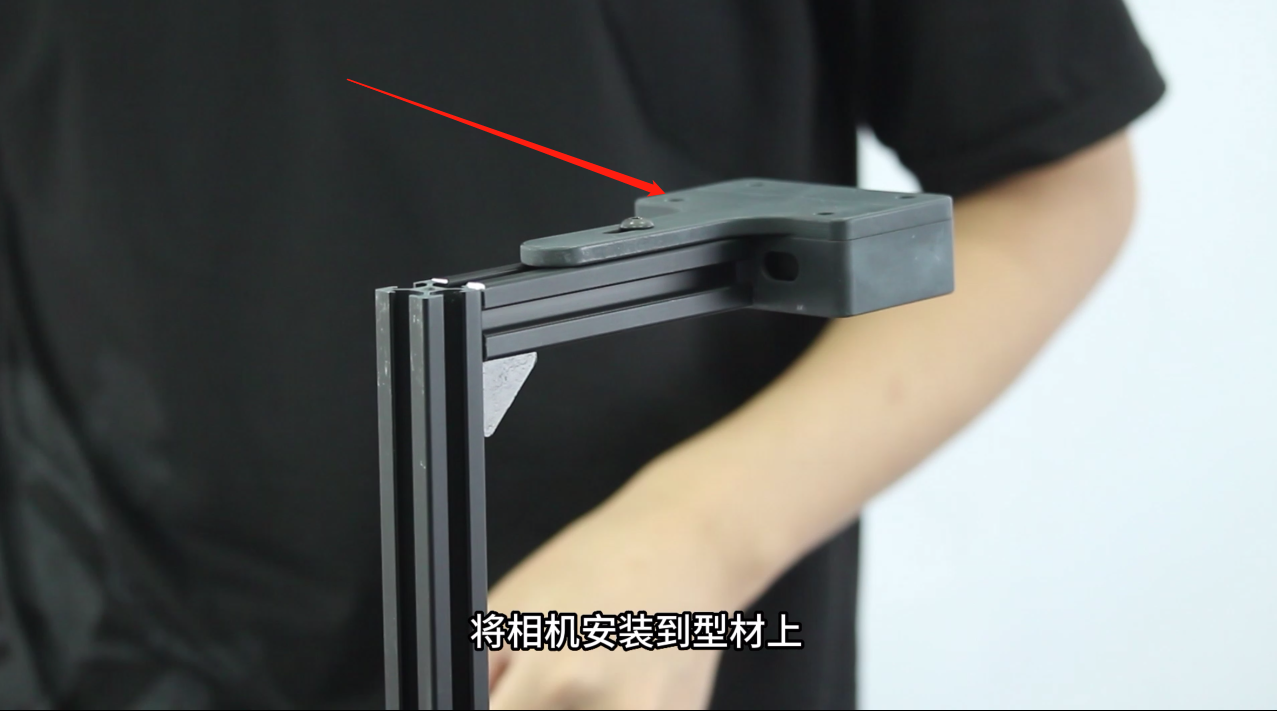
2.5 先放T型螺母 ,使用M5x10盘头内六角螺丝固定摄像头,这样就安装好啦。
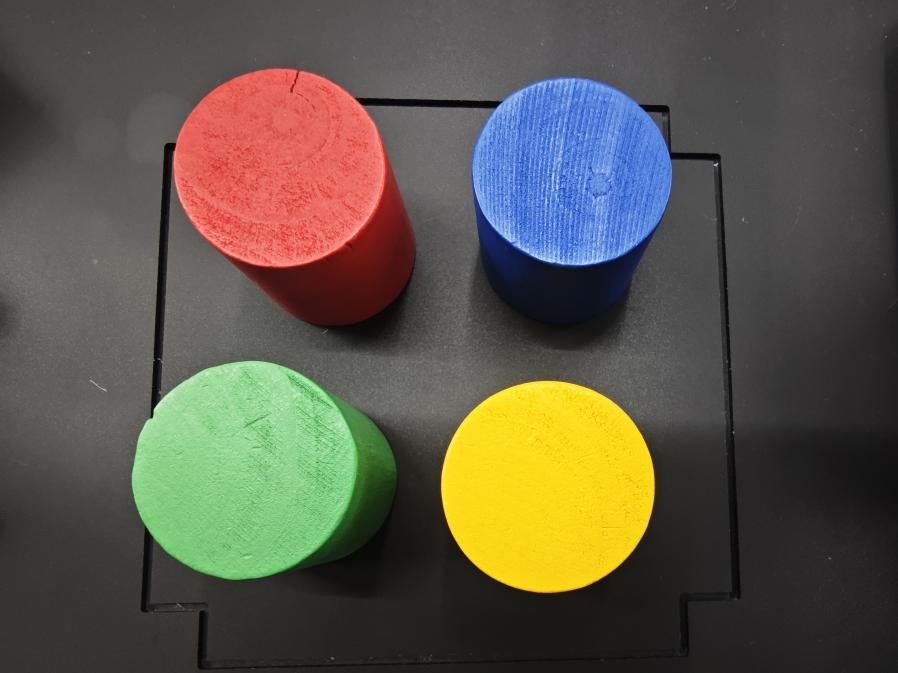
3 摆放零件
3.1 摆放大小零件盒。

4 安装吸泵
4.1 吸泵插满乐高键安装在机械臂末端。
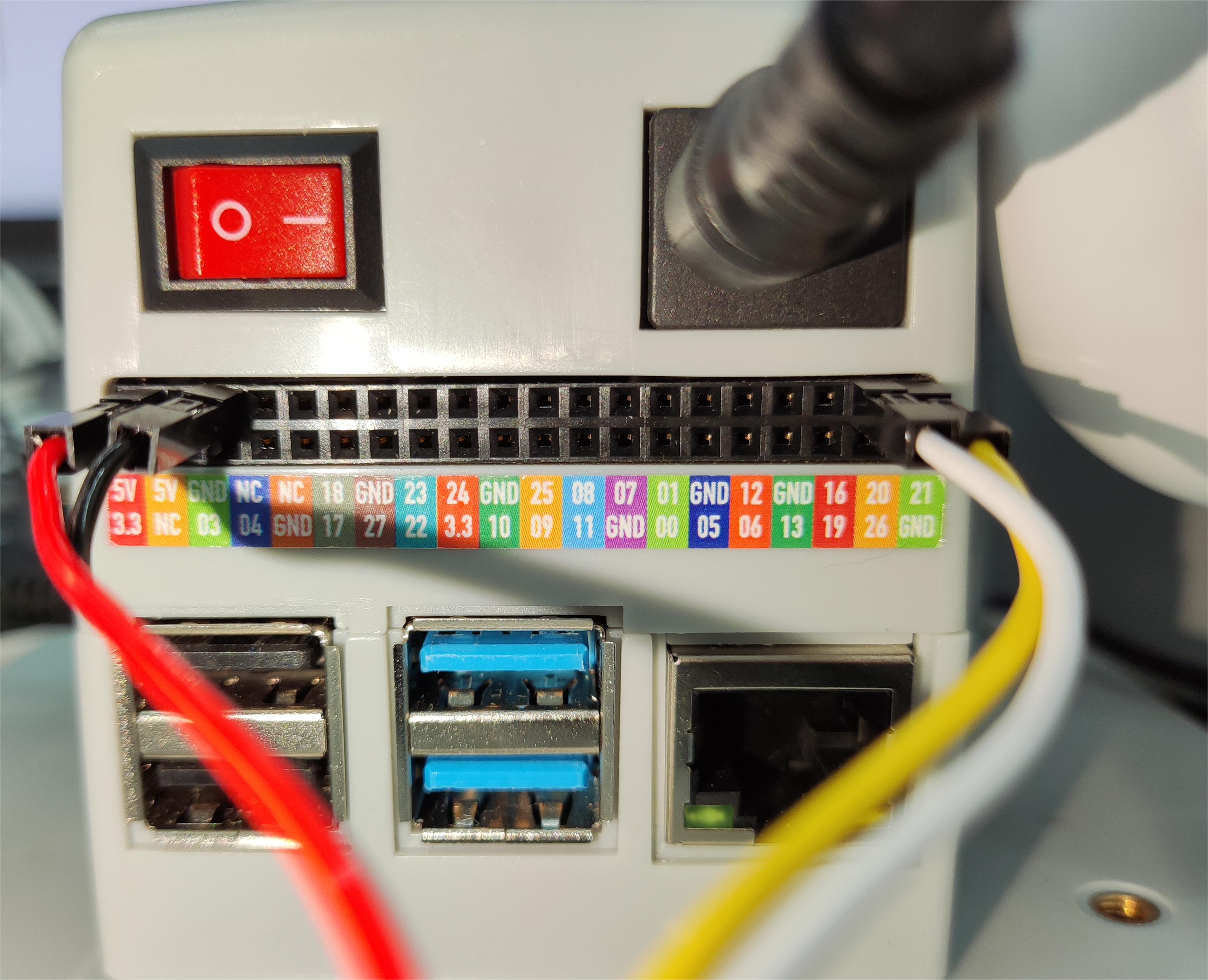
4.2 Grove口连接吸泵,根据引脚定义,另一端依次连接树莓派的GND、5V、21、22;
myCobot 280 M5、mechArm 270 M5 版本:
选出公-母杜邦线,母头端插入吸泵方盒上标有引脚的插口


然后将线接到机械臂的底座IO
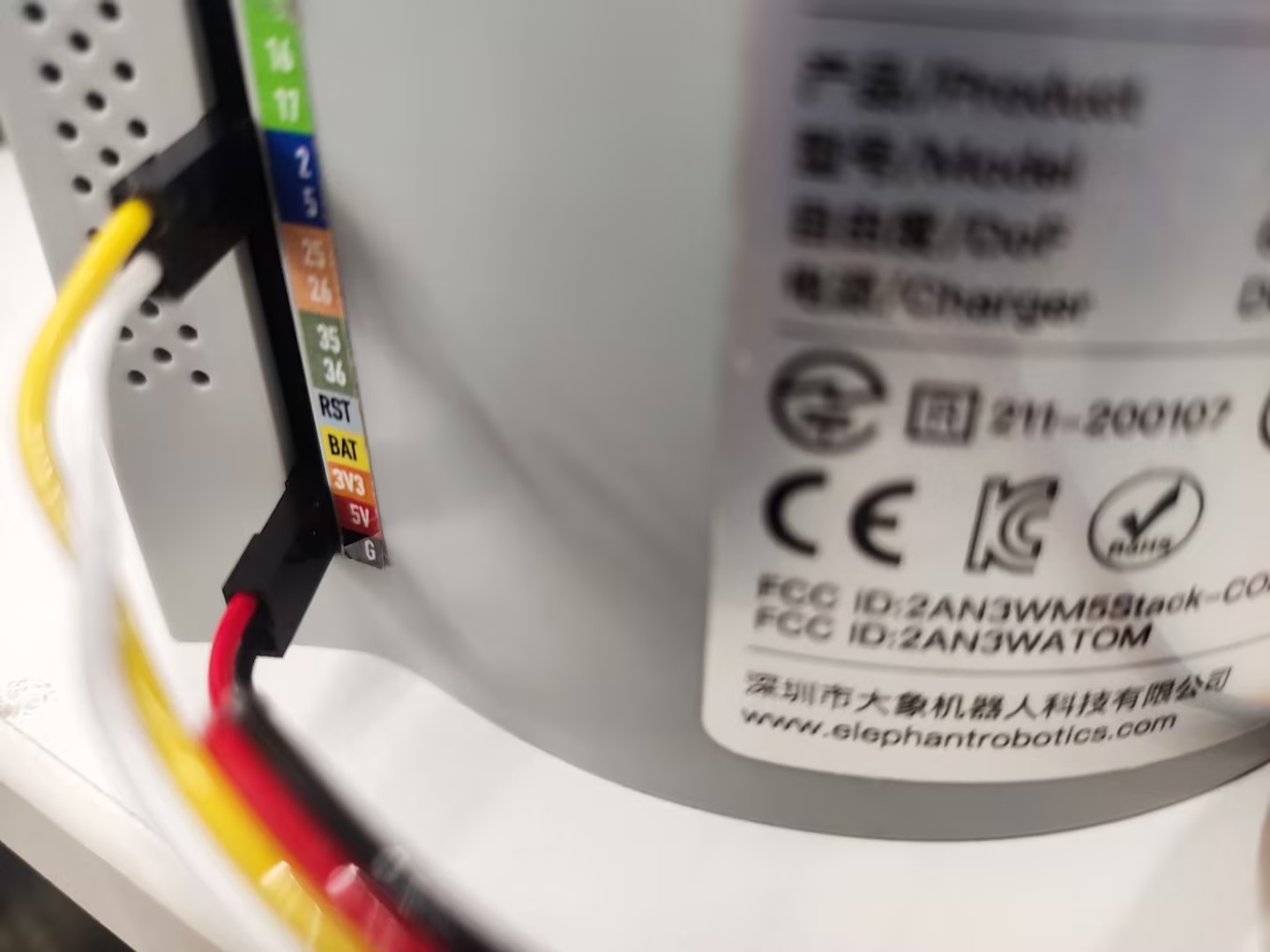
左侧为吸泵引脚,右侧为机械臂引脚
GND -> GND
5V -> 5V
G2 -> 2
G5 -> 5

myCobot 280 PI 版本:
选出公-母杜邦线,母头端插入吸泵方盒上标有引脚的插口
然后将线接到机械臂的底座IO
左侧为吸泵引脚,右侧为机械臂引脚
GND -> GND
5V -> 5V
G2 -> 21
G5 -> 20
5 安装夹爪
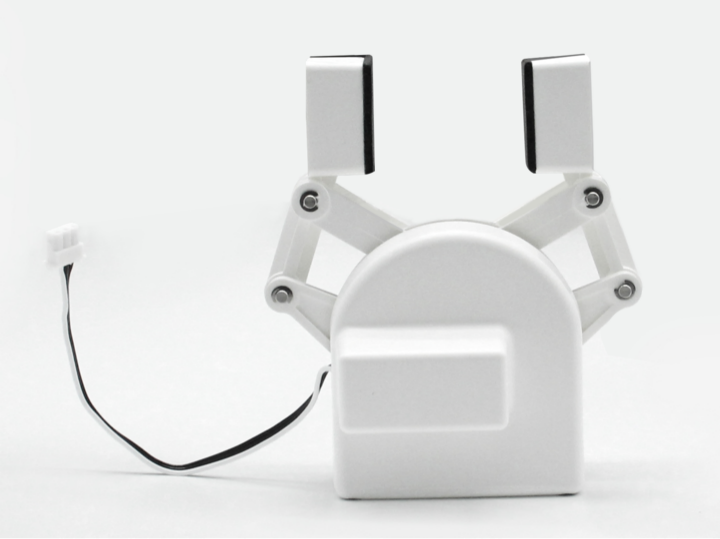
- 具体连接请查看myCobot 自适应夹爪 章节介绍。
6 固定走线
6.1 自粘式线夹根据摄像头走线位置粘贴在亚克力底板上。

6.2 使用黑色魔术贴固定摄像头的线。
6.3 将线放进线夹固定。
6.4 再使用白色魔术贴固定吸泵气管,至此搭建完毕。
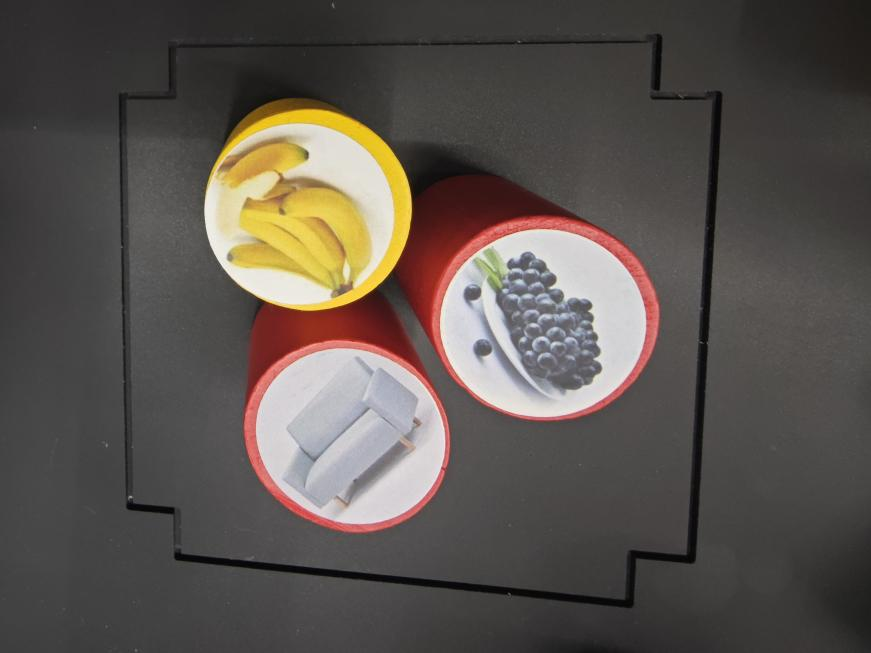
7 物料使用说明
不同的末端执行器使用不同的物料。
1.颜色识别-吸泵

2.形状识别-吸泵:

3.yolov8识别-吸泵

4.拆码垛-吸泵


5.颜色识别-夹爪
6.yolov8识别-夹爪