mechArm 270-Pi

1 结构参数
1.1 机械臂参数
| 指标 | 参数 |
|---|---|
| 名称 | 大象小六轴机械臂 |
| 型号 | mechArm 270-Pi |
| 自由度 | 6 |
| 重复定位精度 | ±0.5 mm |
| 负载 | 250g |
| 自重 | 1kg |
| 工作半径 | 270mm |
| 电源输入 | 8-12V 5A |
| 电机类型 | 高精度磁编码器电机 *六颗 |
| 运动最大速度 | 120°/s |
| 控制 | 树莓派 |
1.2 工作范围
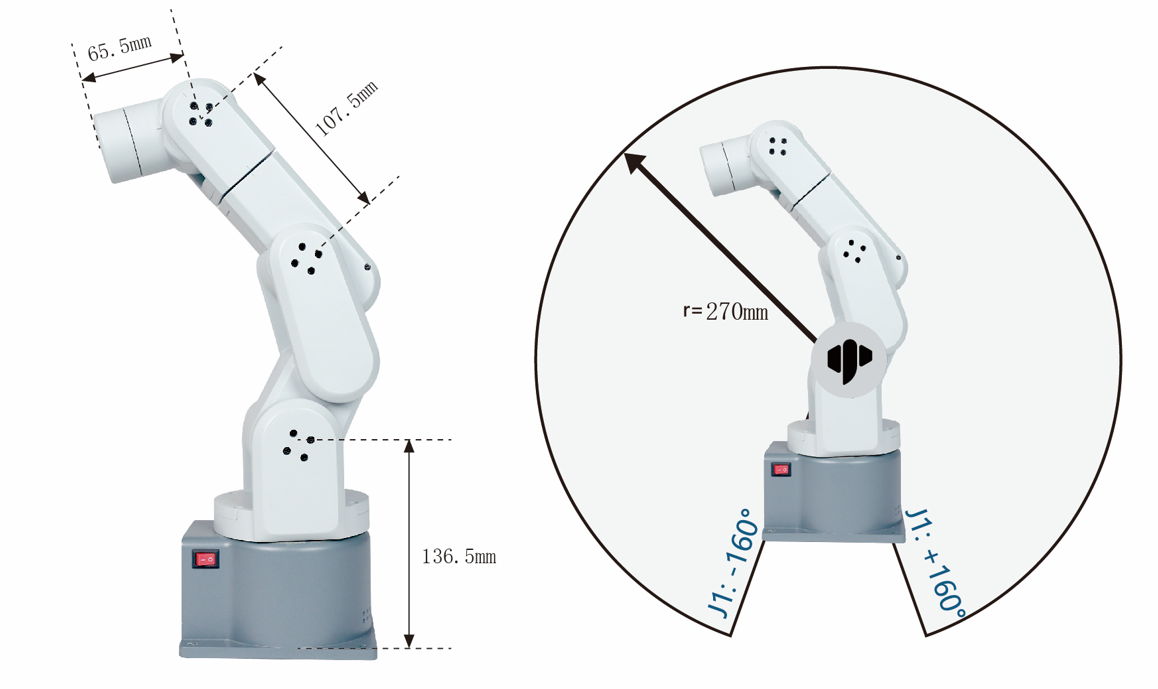
1.3 关节运动范围
| 关键 | 范围 |
|---|---|
| J1 | -165 ~ +165 |
| J2 | -90 ~ +90 |
| J3 | -180 ~ +65 |
| J4 | -165 ~ +165 |
| J5 | -115 ~ +115 |
| J6 | -175 ~ +175 |
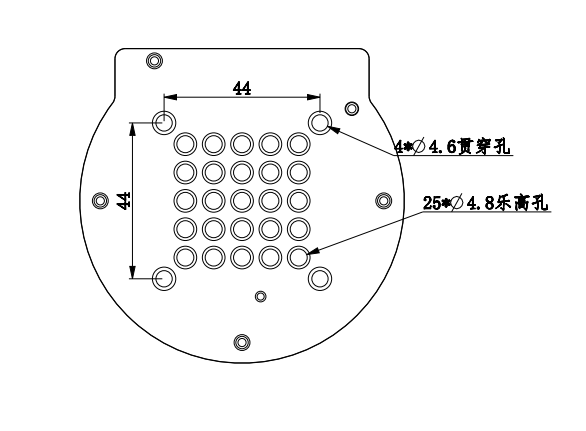
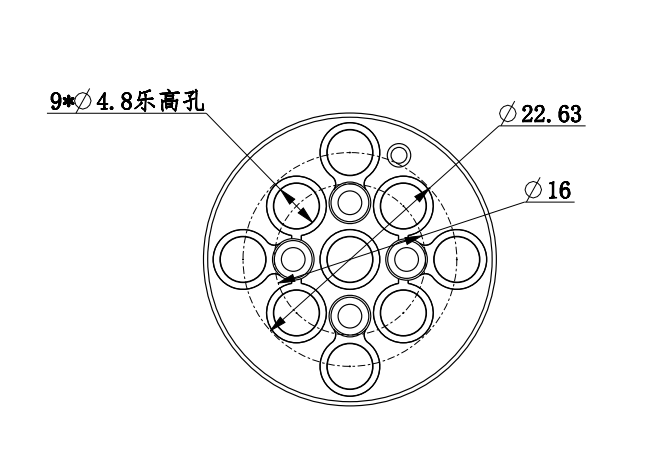
1.4 孔位安装
- 机器人底座安装法兰 底座同时兼容乐高科技件安装方式和M4螺丝安装方式。
- 机器人末端安装法兰 机械臂末端同时兼容乐高科技件孔与螺丝螺纹孔。
1.5 DH参数
