拖动示教
可以实现轨迹录制(包括自适应夹爪)和播放。
Python版本拖动示教仅支持280、270、320机型中的Pi、Jetson Nano版本使用。
使用方法:
- 1.下载拖动示教Python代码文件
- 2.将下载的文件拷贝到机械臂系统内。
3.打开终端运行该文件即可:
python drag_trial_teaching.py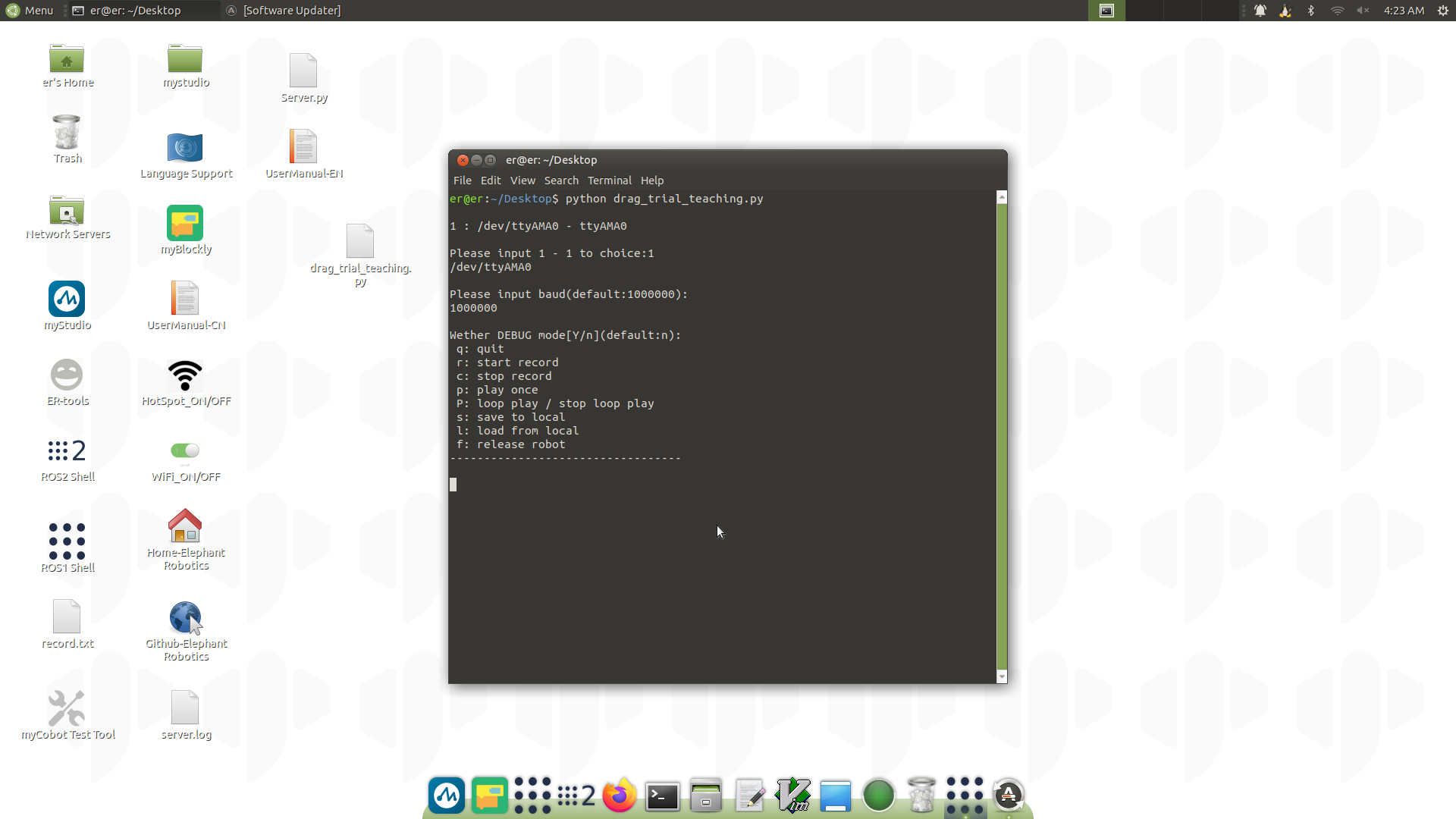
文件运行以后:
- 3.1 选择机械臂端口
- 3.2 输入波特率,默认为1000000 | 机器型号 | 串口号 | 波特率 | |:---------:| :--------:|:--------:| |270 PI| /dev/ttyAMA0|1000000| |280 PI| /dev/ttyAMA0|1000000| |320 PI| /dev/ttyAMA0|115200| |280 Jetson Nano| /dev/ttyTHS1|1000000|
- 3.3 选择是否需要调试,默认不开启调试
- 3.4 最后进入功能选择列表,功能选择均通过键盘按键实现:
q: 退出r: 开始录制c: 停止录制p: 播放一次P: 循环播放 / 停止播放s: 保存本次录制信息,会将录制信息保存到drag_trial_teaching.py同目录下的record.txt文件中l: 会将drag_trial_teaching.py同目录下的record.txt文件中的信息加载进来f: 放松机械臂所有关节