Tracer 小车遥控功能
1. 遥控器说明
使⽤遥控器可以轻松控制TRACER通⽤机器⼈底盘,其定义及其功能如下:
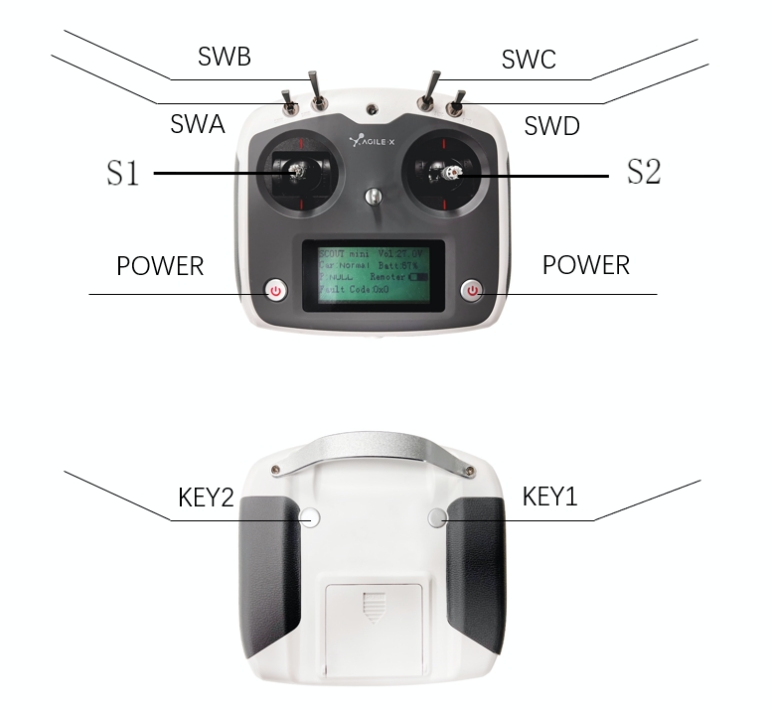
按键的功能定义为: SWA、SWD 暂时未被启用,其中 SWB 为控制模式选择按钮,拨⾄最 上⽅为指令控制模式,拨⾄中间为遥控控制模式;SWC 为灯光控制按钮;S1 为油门按钮,控 制TRACER前进和后退;S2 控制旋转,POWER为电源按钮,同时按住即可开关机 。
遥控界⾯说明:
| 参数 | 说明 |
|---|---|
| Tracer | ⻋型 |
| Vol | 电池电压 |
| Car | 底盘状态 |
| Batt | 底盘电量百分比 |
| P | 驻车 |
| Remoter | 遥控器电量 |
| Fault Code | 错误信息 |
2. 控制指令与运动说明
我们将地⾯移动⻋辆根据 ISO 8855 标准建立坐标参考系,如下:
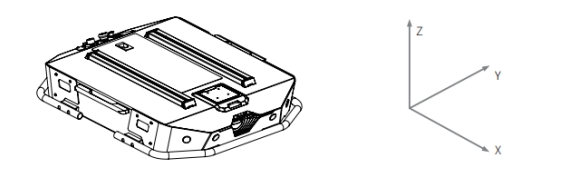
TRACER 车体与建立的参考坐标系 X 轴为平⾏状态。
在 遥控器控制模式下,遥控器摇杆S1往前推动则为往 X 正方向运动,S1 往后推动则往 X 负方向运动,S1 推动至最⼤值时,往X正方向运动速度最⼤,S1推动⾄最小值时,往 X 负方向运动速度最大;遥控器摇杆S2 左右控制⻋体的旋转运动,S2往左推动⻋体则由 X 轴正方向往 Y 正方向旋转,S2往右推动⻋体则由 X 轴正方向往 Y 负方向旋转,S2往左推动⾄最⼤值时,逆时针方向旋转线速度最⼤,S2往右推动⾄最⼤值时,顺时针旋转线运动速度⼤。
在 控制指令模式下,线速度的正值表示往X轴正方向运动,线速度的负值表示往X轴负⽅向运动;⻆速度的正值表示⻋体由X轴正方向往 Y 轴正⽅向运动,⻆速度的负值表示⻋体由 X 轴正⽅向往Y轴负⽅向运动。
注意:使用遥控器摇杆进行操作时,需缓慢轻推摇杆,避免速度过快。当小车顶部有载重时,速度过快容易出现重心不稳,影响运动控制的平稳性。
3. 使用与操作
检查
检查⻋体状态。检查⻋体是否有明显异常;如有,请联系售后⽀持。
关闭操作
旋转旋钮开关,即可切断电源。
启动
- 急停开关状态。确认急停按钮均处于释放状态;
- 旋转旋钮开关,正常情况下,电压表正常显示电池电压,前灯正常亮起。
急停
按下⻋体左右尾部的急停开关即可。
遥控控制基本操作流程
正常启动 TRACER 移动机器底盘后,启动遥控器,将控制模式选择为遥控控制模式,即可通过遥KO控控制 TRACER平台运动。