C650控制M750程序案例
程序地址
首先我们需要将MyarmM750机械臂通过USB转typeC线连接到系统上,并给其通电
通过按钮选中 Transponder 再按“OK”按钮

然后屏幕会显示
我们可以看到箭头指向 “USB UART” ,再按“OK”按钮,进入之后会显示 “NO”,再按 “Exit” 按钮,回到箭头指向 “USB UART” ,再按“OK”按钮,这时会显示 “OK”

首先我们需要将MyarmC650机械臂通过USB转typeC线连接到系统上,并给其通电
通过按钮选中 Transponder 再按“OK”按钮
然后屏幕会显示
我们可以看到箭头指向 “USB UART” ,再按“OK”按钮,进入之后会显示 “NO”,再按 “Exit” 按钮,回到箭头指向 “USB UART” ,再按“OK”按钮,这时会显示 “OK”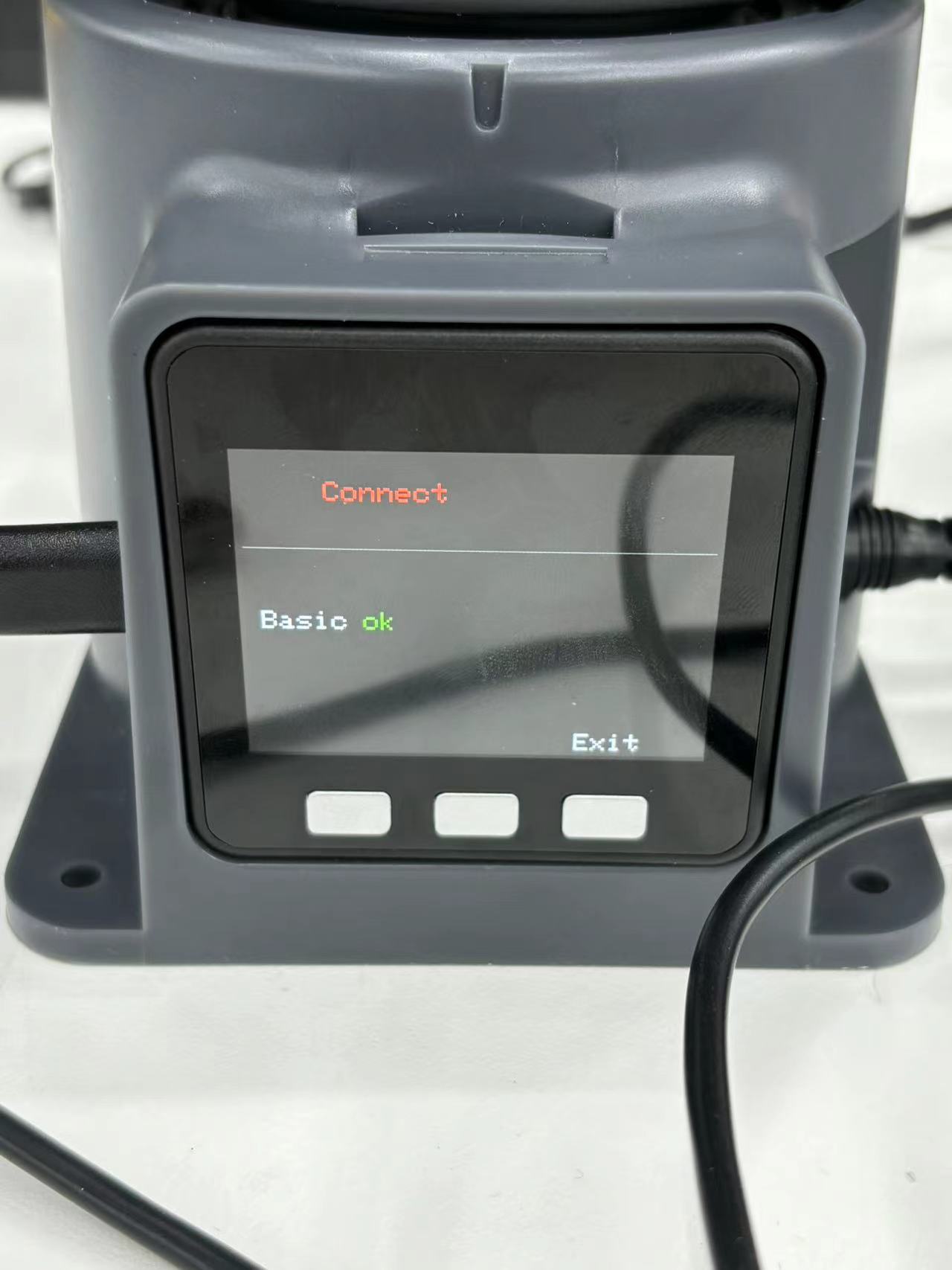
这时我们的MyarmM750 和 MyArmC650已经成功启动
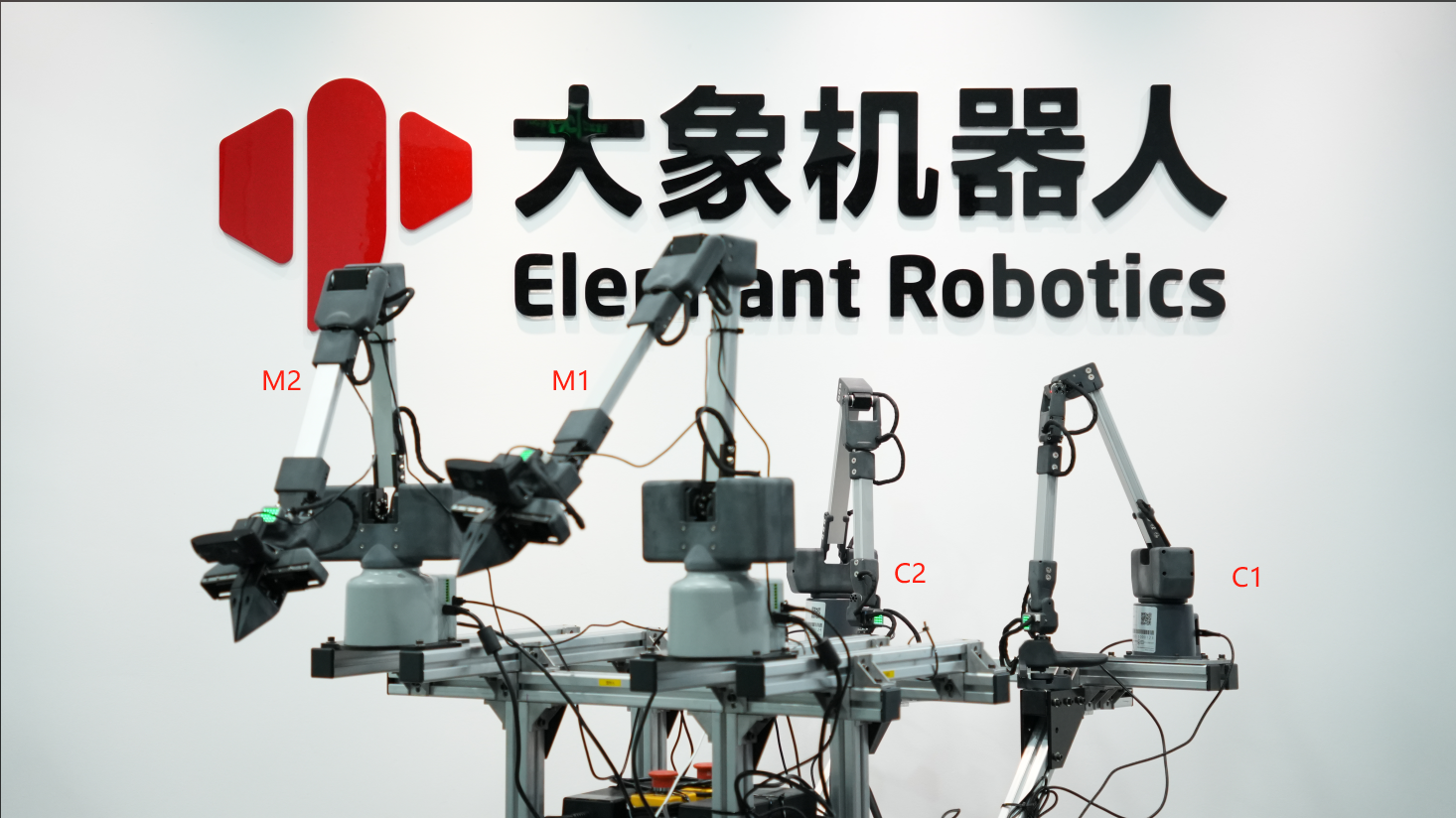
此功能需要将四台机械臂通过USB的方式同时连接到系统上,我们要区分每台机械臂连接我们的串口是多少,新建终端:
按 TAB键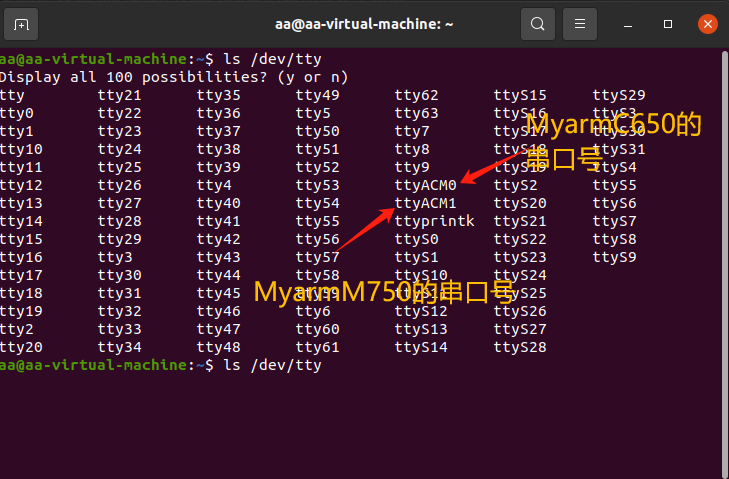
如何区分串口号:先连接一台机械臂然后输入ls /dev/tty查看当前串口号,在不断开这一台机械臂的情况下,连接另一台机械臂,输入该指令查看四个机械臂的串口号
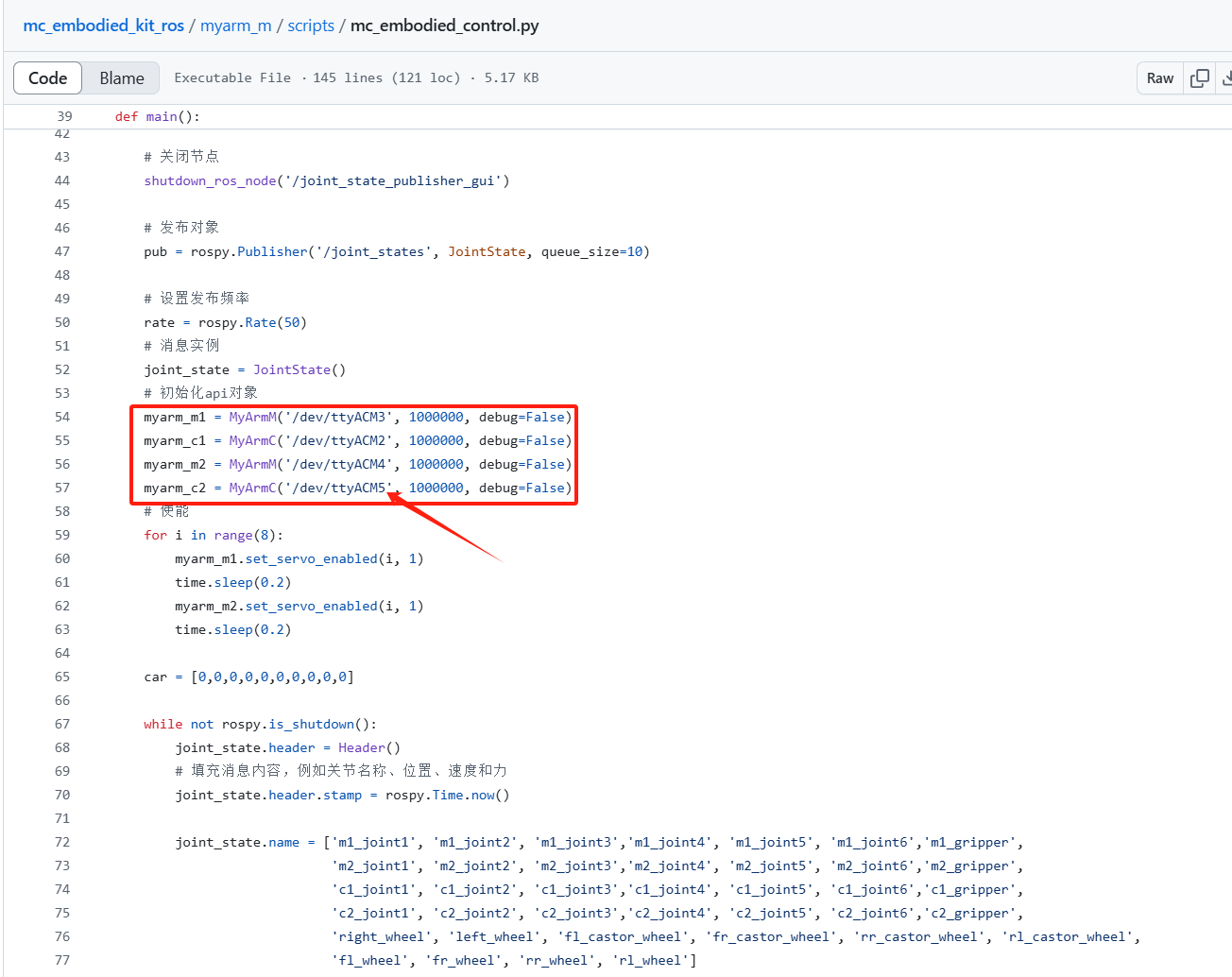
根据对应的串口号修改mc_embodied_kit_ros/myarm_m/scripts/mc_embodied_control.py文件中的串口号,如图:
在工作空间新建一个终端输入:
roscore
再新建一个终端,输入:
roslaunch myarm_m mc_embodied_control.launch
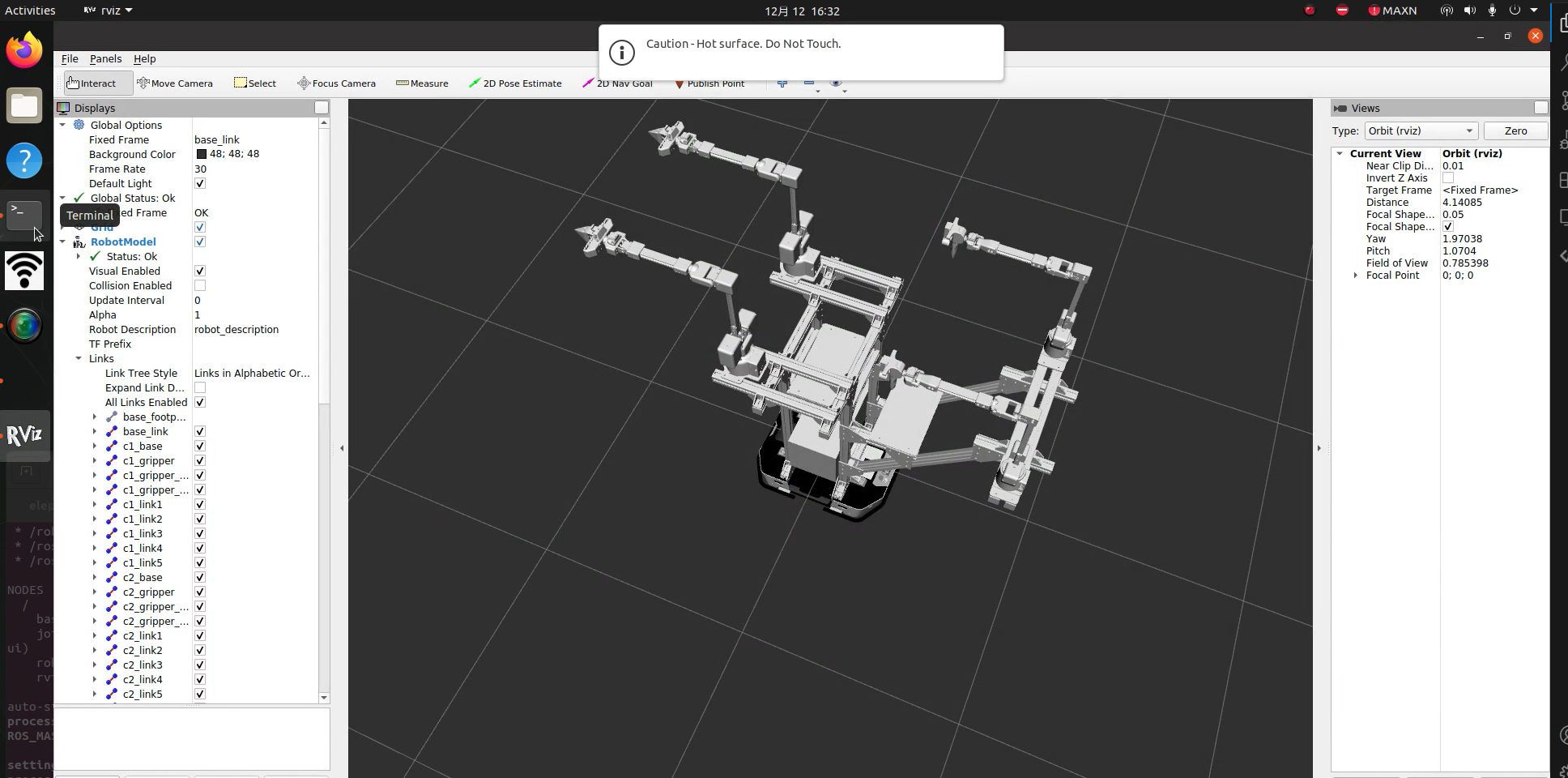
启动rviz仿真之后,再打开一个新的Terminal,输入:
rosrun myarm_m mc_embodied_control.py
即可实现MyarmC650控制MyarmM750的功能
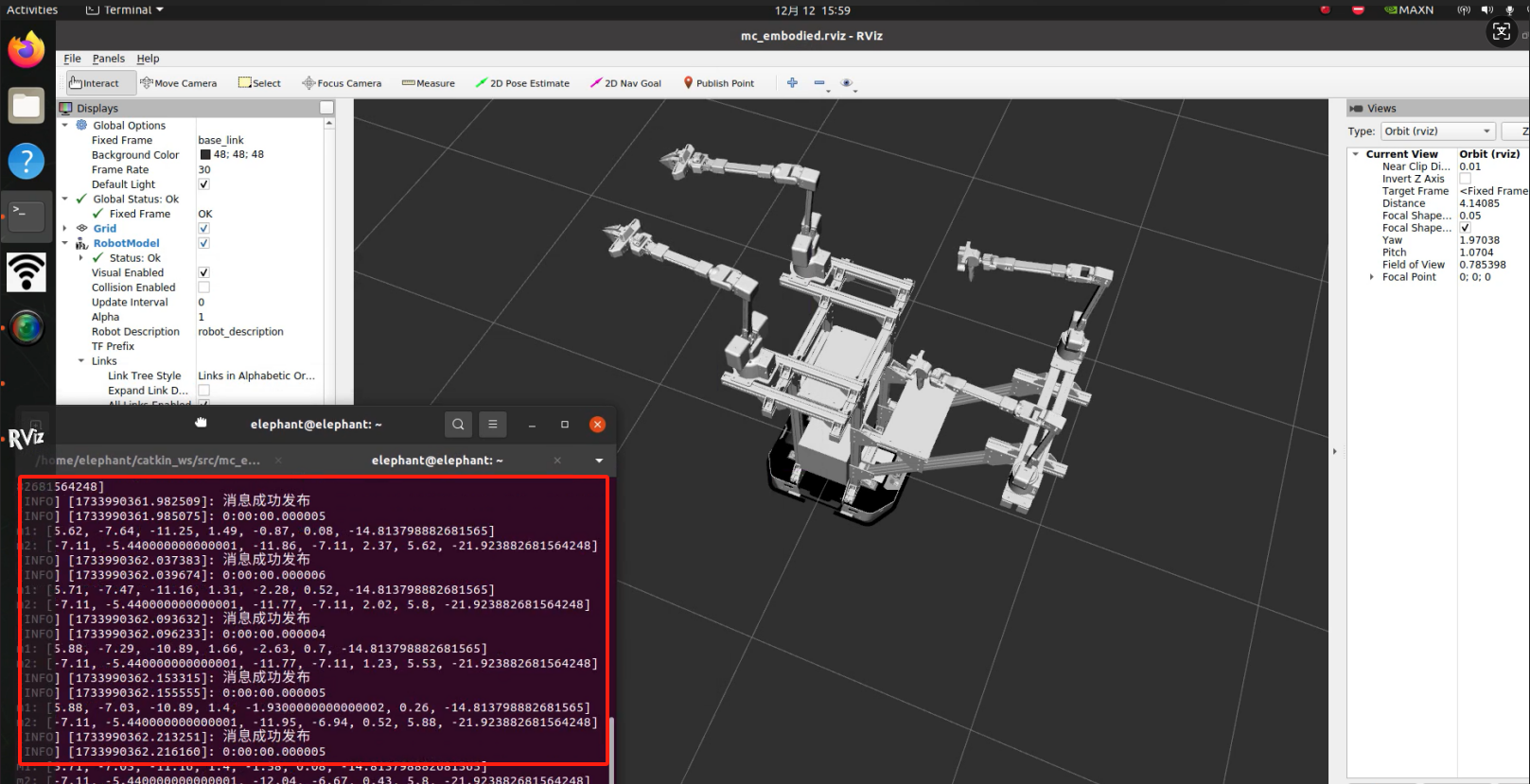
此时,我们就能用手去运动MyarmC650机械臂,rivz中的两款机械臂都跟随现实中的MyarmC650运动,在此同时,现实中的MayrmM750机械臂也会跟随MyarmC650运动(夹抓功能也可以运动)