案例步骤
1. 开启Tracer小车底盘节点
- 为确保CAN总线使能,每次打开电源、系统重启都需要运行此命令:
rosrun tracer_bringup setup_can2usb.bash
- 启动底盘小车ROS节点:
roslaunch tracer_bringup tracer_robot_base.launch
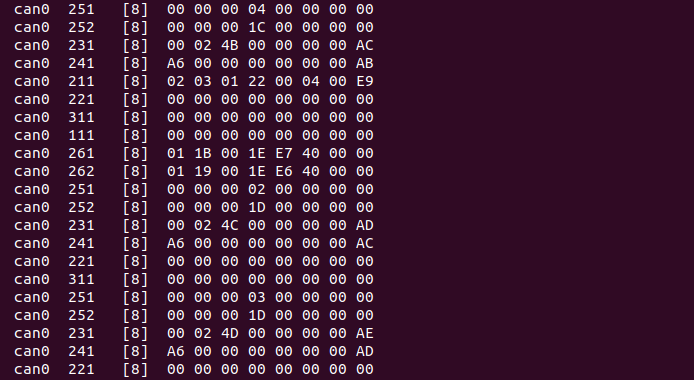
如果已经将can-to-usb连接到TRACER机器人,并且小车已经开机、CAN总线已经使能、底盘节点已经开启,使用以下命令监控TRACER底盘的数据
candump can0
若底盘数据正常,终端会一直输出如下数据:
2. 案例实现
注意:使用API接口之前,需要确保终端目录位于目标路径;运动之前,确保小车周围有足够的空间场地进行运动。
- 终端切换到目标路径:
cd ~/catkin_ws/src/mc_embodied_kit_ros/tracer_bringup/scripts
# 示例
from chassis_controller import ChassisController
import time
cc = ChassisController()
# # 前进 2 秒, 速度为 0.5 m/s
cc.move_forward(0.5, 2)
time.sleep(3)
# 后退 2 秒, 速度为 -0.5 m/s
cc.move_backward(-0.5, 2)
timme.sleep(3)
# 向左旋转 5 秒, 速度为 0.5 m/s
cc.turn_left(0.5, 5)
time.sleep(3)
# 向右旋转 5 秒, 速度为 -0.5 m/s
cc.turn_right(-0.5, 5)
# 停止小车
cc.stop()