Control single joint motion
Preparation before starting
Other series: Make sure the machine is normal
Learning content in this chapter
How to use myBlockly to control the single joint motion of the robot
API introduction
- Method module:
Set joint
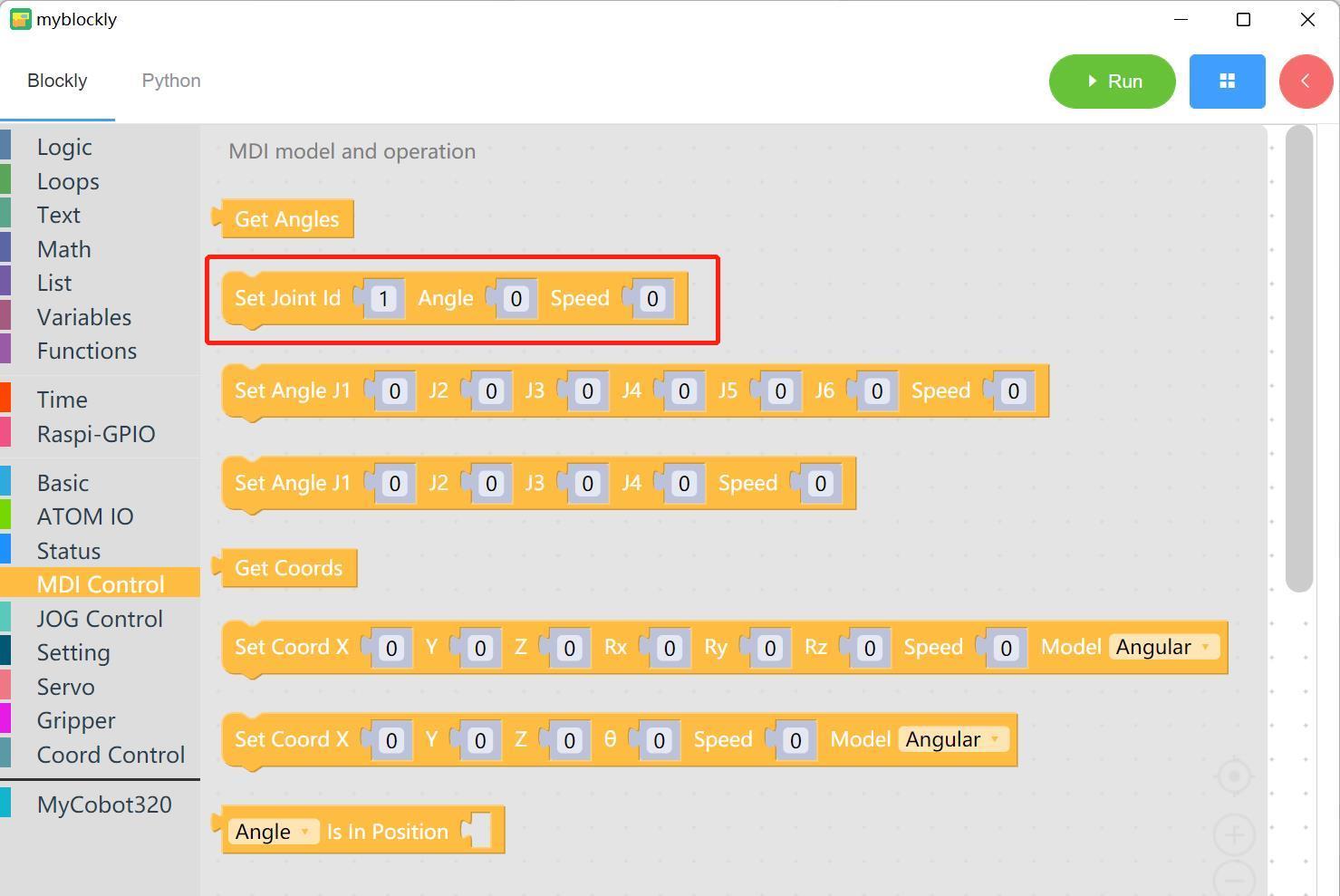

Applicable scope: myCobot280 series, myCobot320 series, mechArm series, myPalletizer series
Parameter introduction:
This method has three parameters that can be adjusted:
Joint parameters: The parameter range of myCobot280 series, myCobot320 series and mechArm series is: 1-6; the parameter range of myPalletizer series is: 1-4 (corresponding to the joints of the robot arm)
Angle parameters: refer to the parameters of the corresponding model
Speed: Control the speed of the robot arm movement, the parameter range is: 0~100
Purpose: Control the movement of a single joint of the robot arm
Simple demonstration
- The graphic code is as follows:
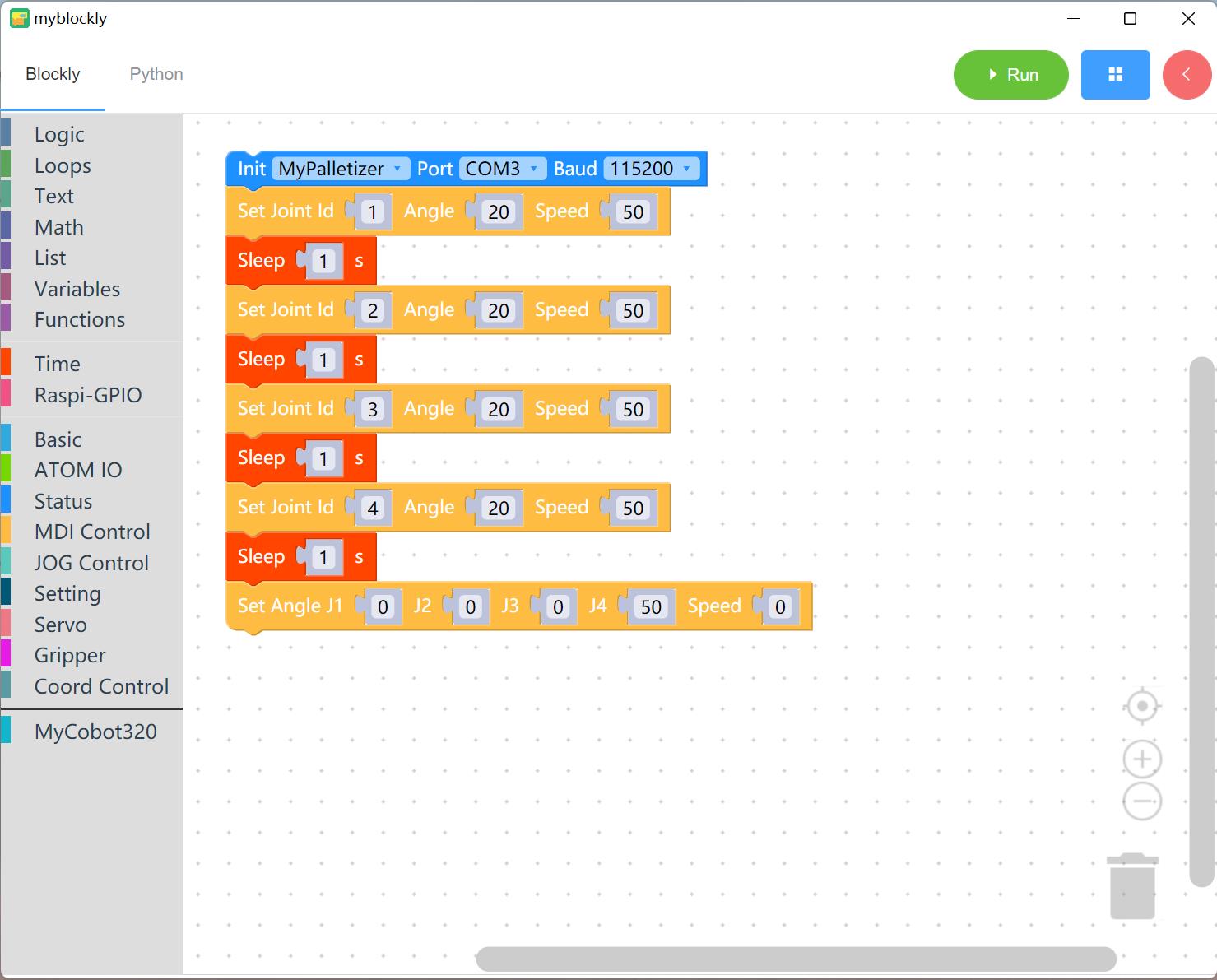
- Implementation content:
Control the robot arm 1 joint, run to the position of 1 joint angle 20 at a speed of 50, after one second,
Control the robot arm 2 joint, run to the position of 2 joint angle 20 at a speed of 50, after one second,
Control the robot arm 3 joint, run to the position of 3 joint angle 20 at a speed of 50, after one second,
Control the robot arm 4 joint, run to the position of 4 joint angle 20 at a speed of 50, after one second,
Return all joints of the robot arm to the origin at a speed of 60, and end the program.