套装搭建
安装视频
1 安装机械臂
1.1 myCobot 320 M5/Pi版本机械臂,先将带有4个孔位的亚克力底板置于桌面中间。
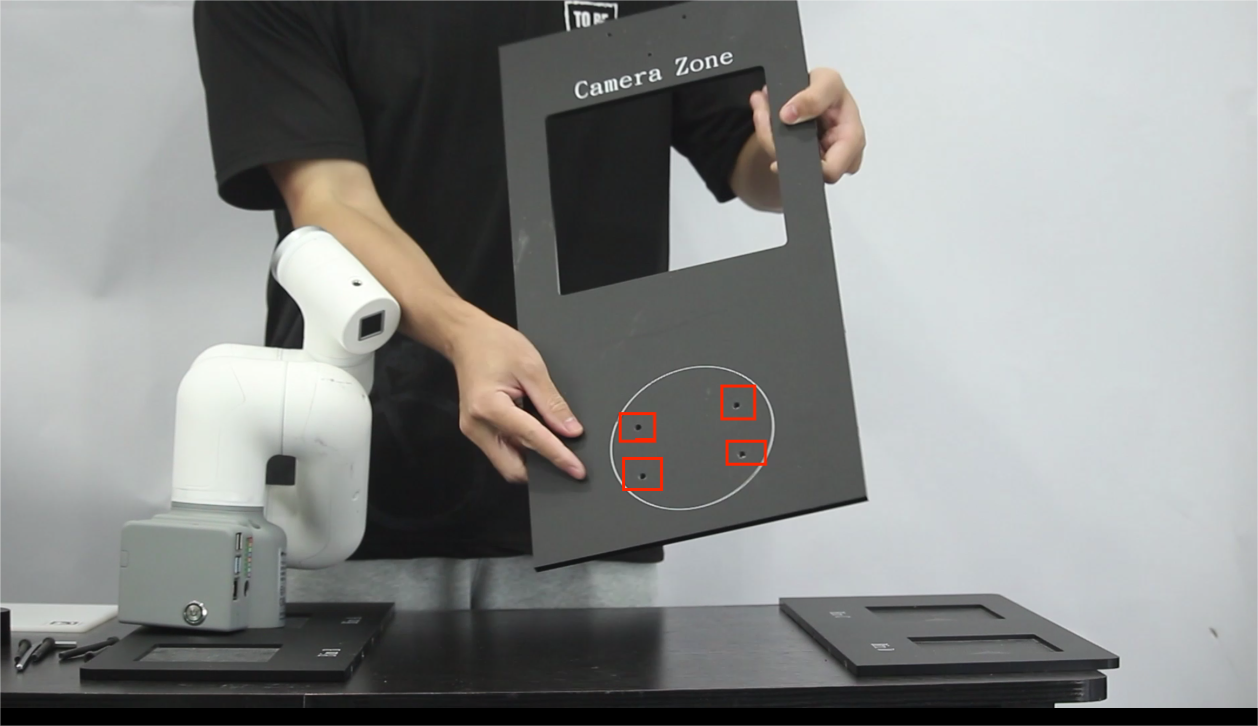
1.2 机械臂对准孔位,使用M6螺丝固定。

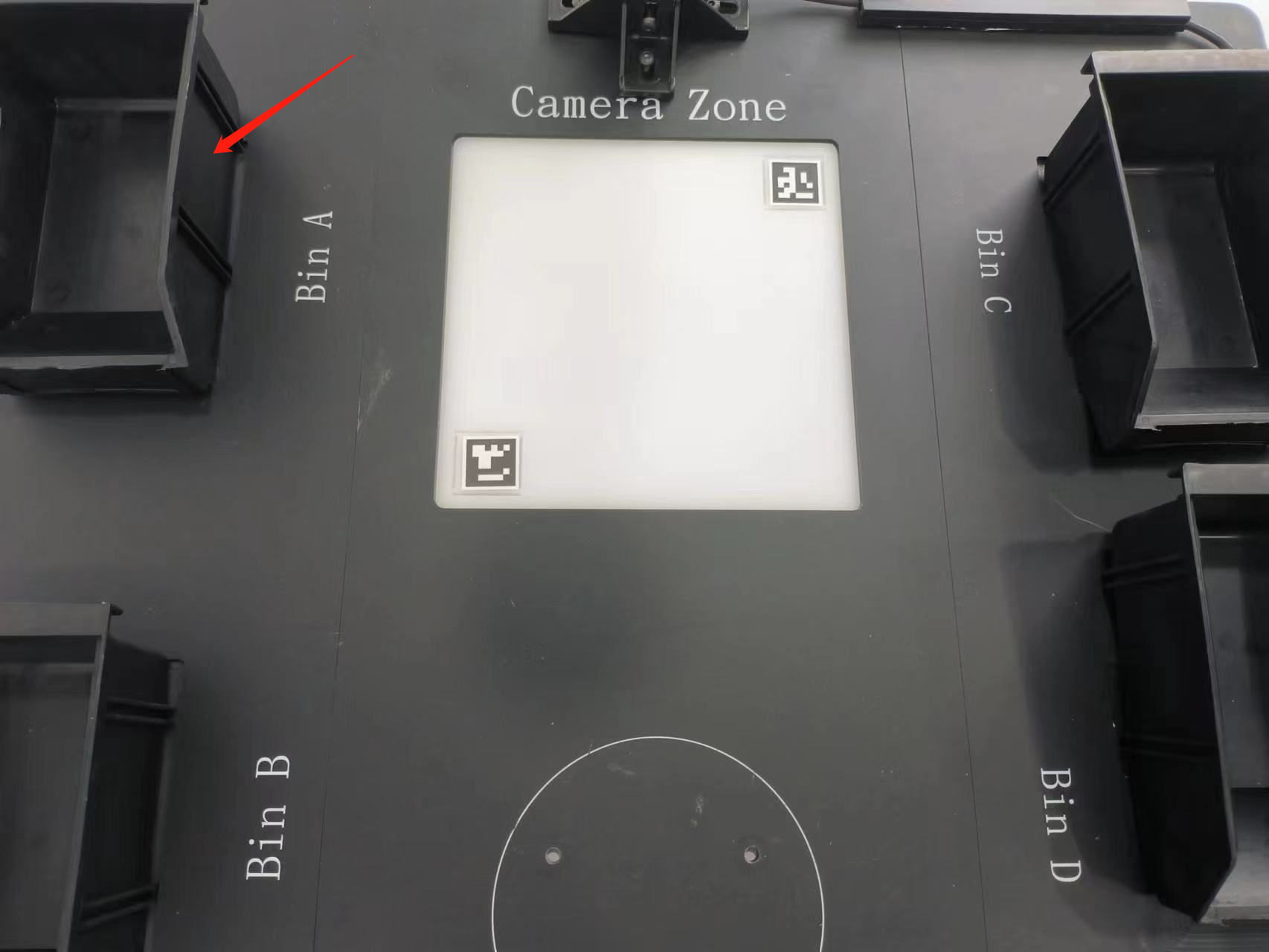
1.3 将3块亚克力底板进行拼接,中间:固定机械臂的底板,左边:携带Bin A和Bin B信息的底板,右边:携带Bin C和Bin D的底板。
2 安装摄像头支架
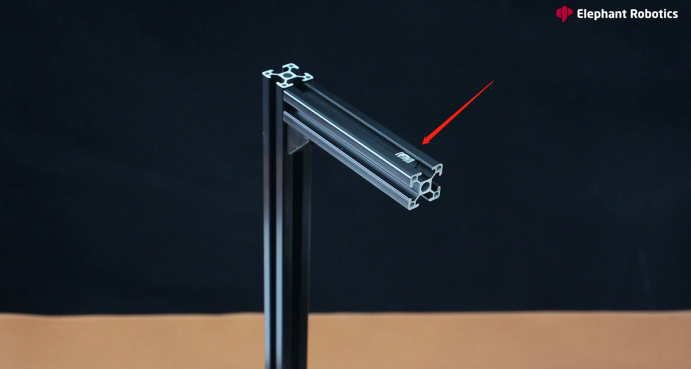
2.1 T型螺母放进长型材凹槽处,使用M5x8盘头内六角螺丝安装角码,依次安装3个。
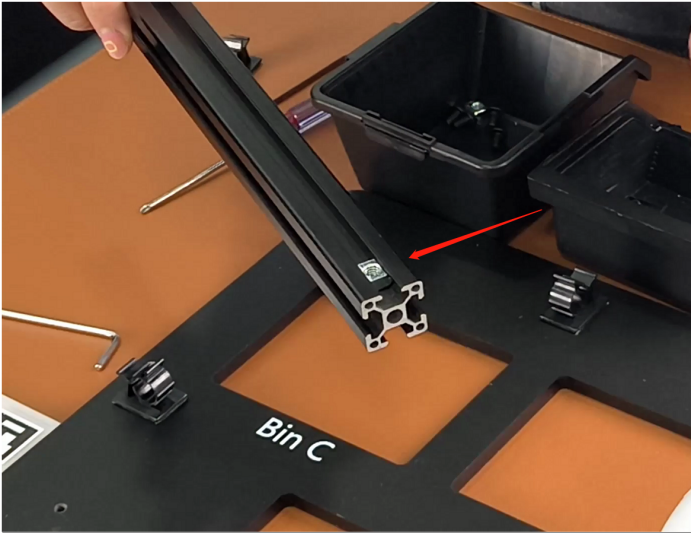
2.2 重复上述,安装短型材角码。
2.3 T型螺母放进型材凹槽处,使用M5x8盘头内六角螺丝将短型材安装在长型材上。

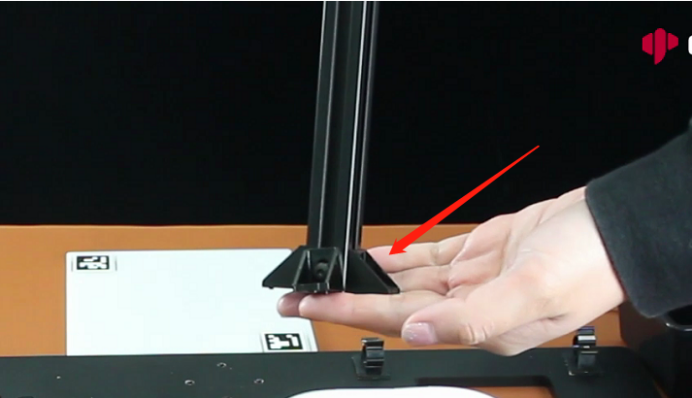
2.4 将组装好的摄像头支架对准亚克力板孔位,使用M5x10盘头内六角螺丝固定,注意先将3个螺丝简单固定,之后在依次拧紧螺丝,避免孔位偏离。
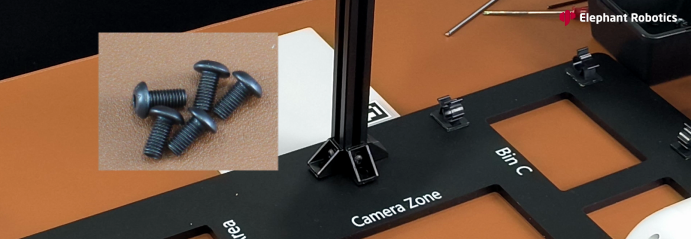
2.5 先放T型螺母 ,使用M5x10盘头内六角螺丝固定摄像头,这样就安装好啦。

3 摆放零件
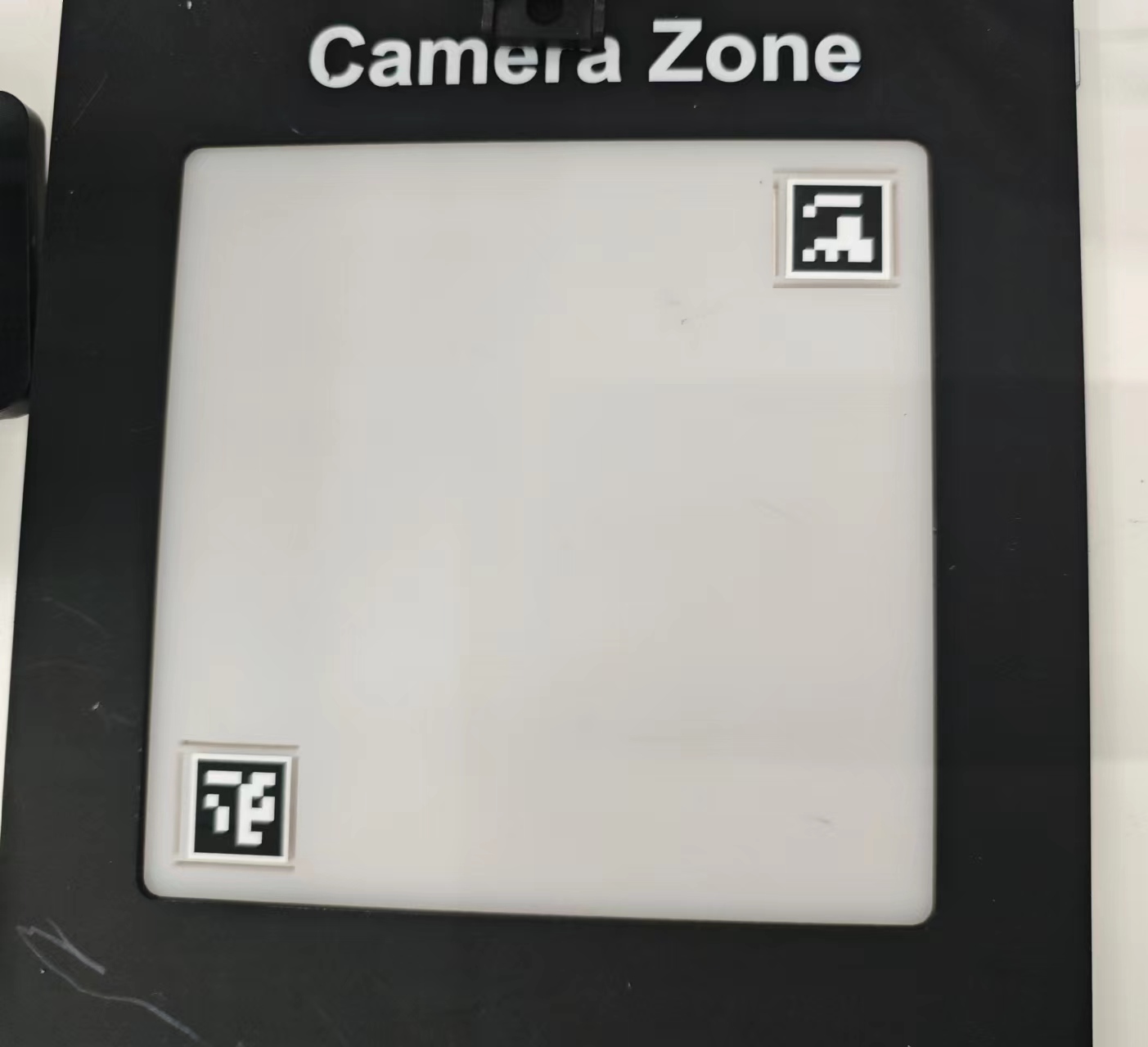
3.1 先将黄色保护膜撕掉,根据下面粘贴二维码后摆放。
3.2 摆放大小零件盒。
注意: 二维码板子摆放位置方向已发生改变,如3.1所示。
4 安装吸泵
4.1 吸泵使用M6螺丝固定安装在机械臂末端。
4.2 连接机械臂右侧的 IO 引脚接口。

5 安装夹爪

- 具体连接请查看myCobot Pro 自适应夹爪 章节介绍。
6 固定走线
6.1 走线槽根据摄像头走线位置粘贴在亚克力底板上。
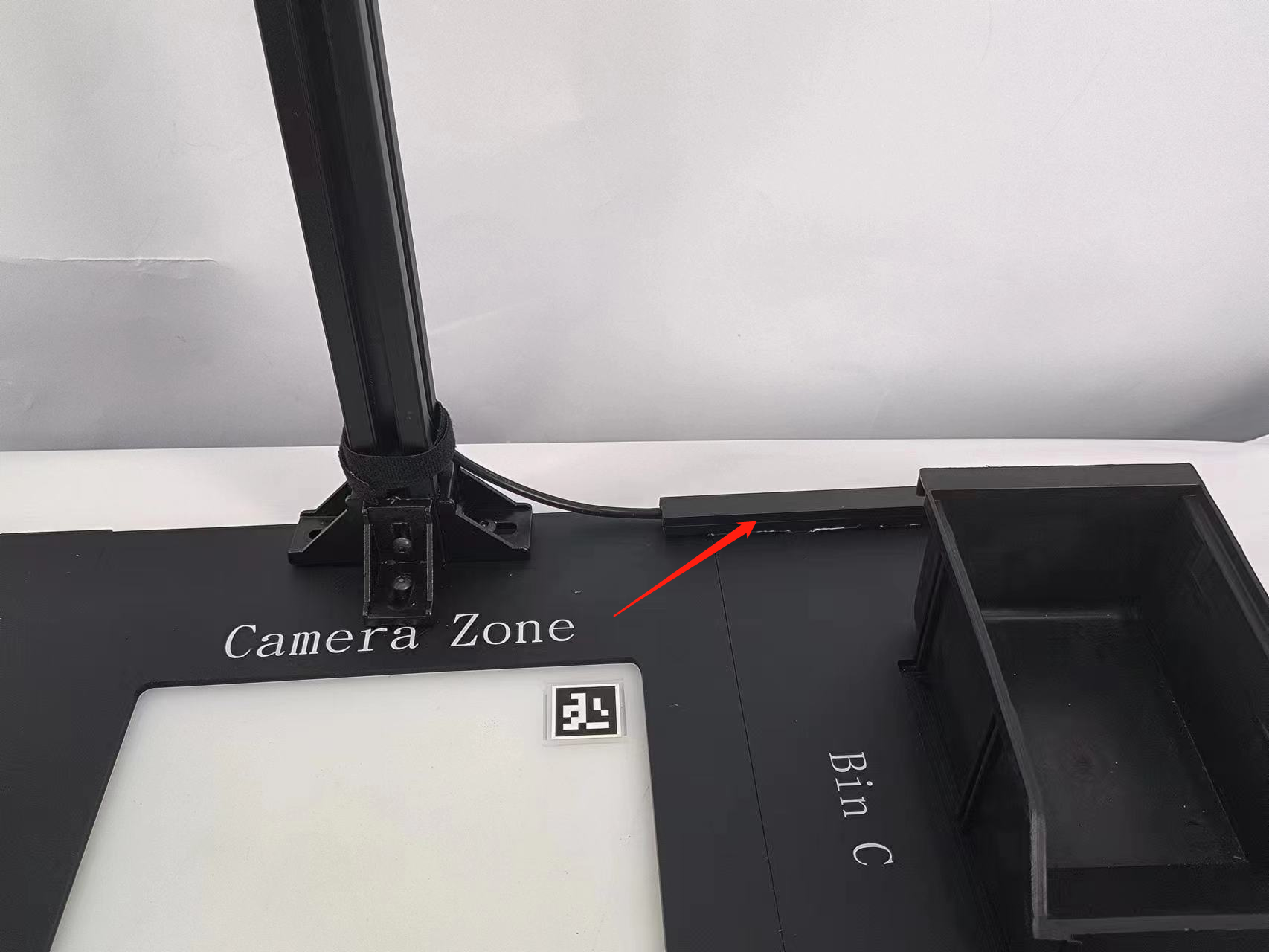
6.2 使用黑色魔术贴固定摄像头的线。
6.3 将线放进线槽固定。
6.4 再使用白色魔术贴固定吸泵气管,至此搭建完毕。