文档目录
Introduction
1 产品介绍
2 产品特性
3 用户须知
4 首次安装使用
5 基础功能使用
屏幕控制
自定义协议控制
modbus rtu协议控制
柔性指尖更换说明
6 python SDK 开发指南
pymycobot库控制
python USB-485库控制
ros控制
7 使用案例
8 相关资料下载
9 关于我们
9.1 大象机器人
9.2 联系我们
Published with GitBook
在这篇文章中:
柔性指尖更换说明
柔性夹爪更换操作步骤说明
序号
操作图示
操作详解
1
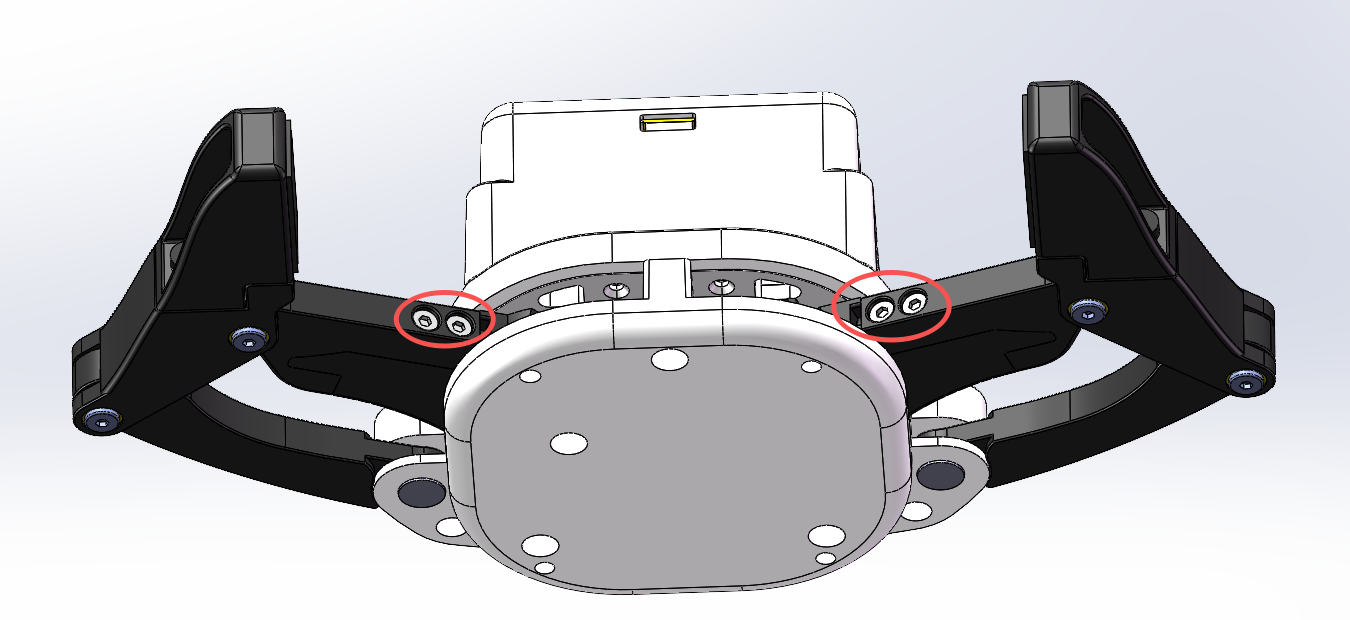
使用对角宽度为2mm的内六角扳手拆除左图中4颗螺钉,并保留拆下的螺钉,之后安装柔性夹爪需要使用
2
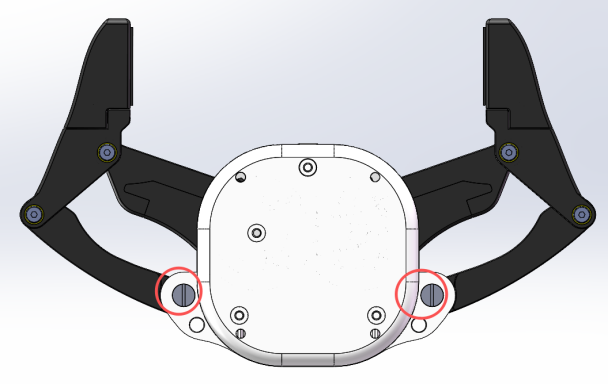
使用一字螺丝刀,拆下夹爪下端两颗一字头螺丝
3
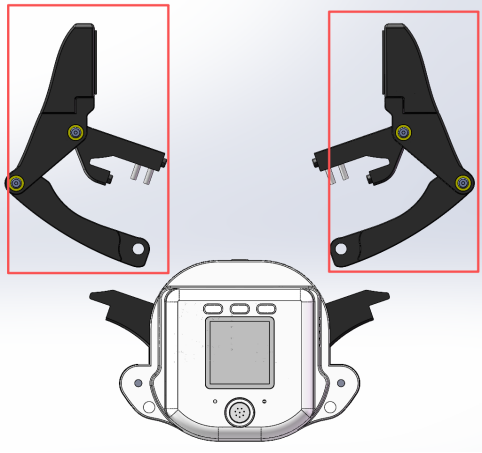
上述两处螺丝拆除完成后,可将原夹爪部分分离出来
4
更换柔性指尖,分别放置在左右运动杆位置,使用对角宽度为2mm内六角扳手,将原来同位置拆除的螺丝重新锁好
results matching "
"
No results matching "
"