python USB-485库控制
USB-485模块接线:
连接夹爪端的 24V,GND, 485_A(T/R+,485+) , 485_B(T/R-,485-)共 4 根线,电源为24V直流稳压电源,将模块的 USB 插口插入到电脑的 USB 接口

485A 接入 485 转 USB 模块 A+;
485B 接入 485 转 USB 模块 B-;
24V 接入 24V 直流稳压电源正极;
GND 接入 24V 直流稳压电源负极
驱动库安装
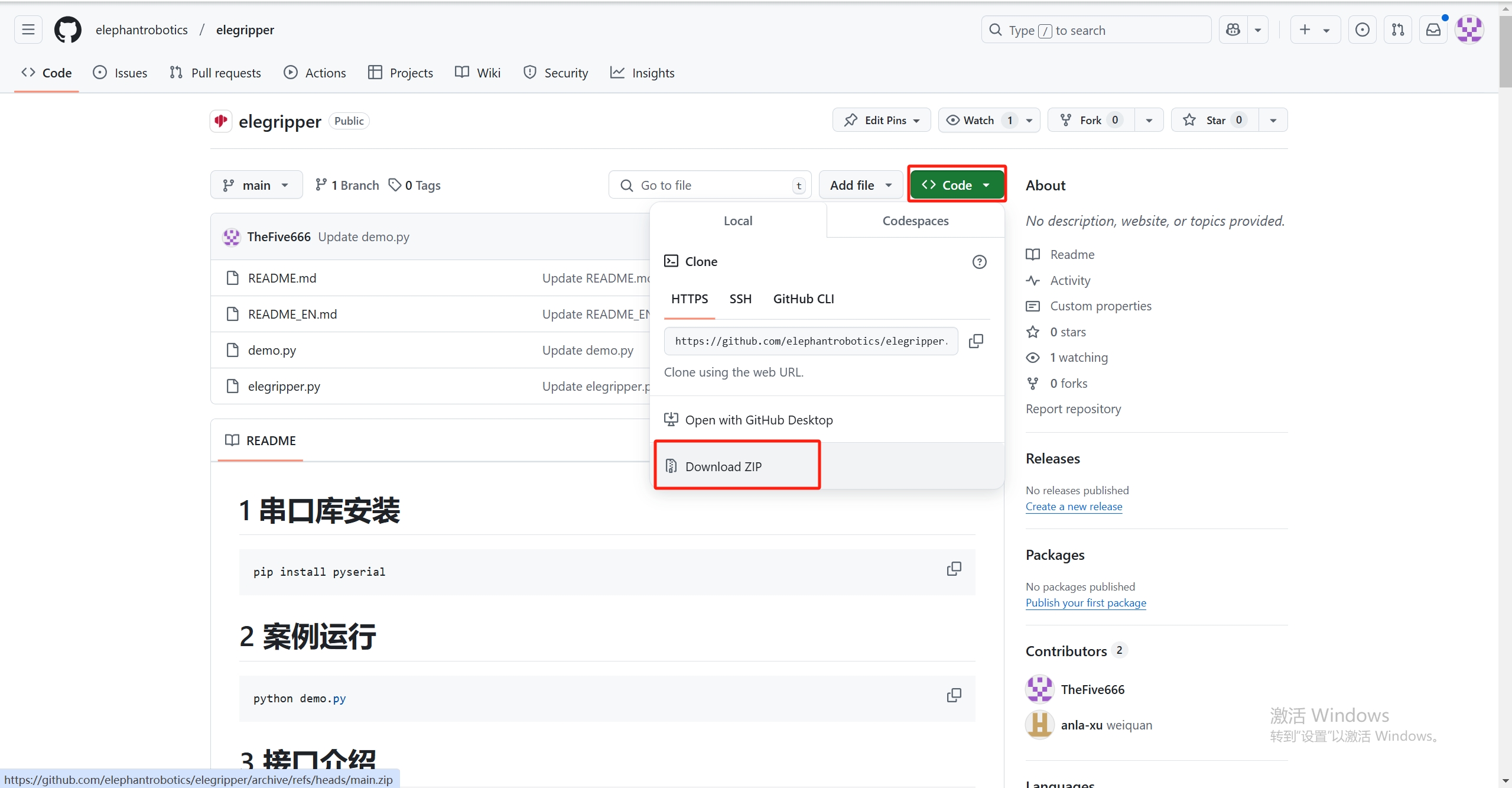
在电脑终端执行下面命令,安装依赖库
pip install pyserial
API说明
get_firmware_version()
- 功能: 获取夹爪固件主版本号
- 参数: 无
- 返回:
(int)固件主版本号
get_modified_version()
- 功能: 获取夹爪固件次版本号
- 参数: 无
- 返回:
(int)固件次版本号
get_gripper_Id()
- 功能: 获取夹爪ID
- 参数: 无
- 返回:
(int)夹爪ID
get_gripper_baud()
- 功能: 获取夹爪波特率
- 参数: 无
- 返回:
(int)0-50: 1152001: 10000002: 576003: 192004: 96005: 4800
get_gripper_value()
- 功能: 获取夹爪的当前位置数据信息
- 参数: 无
- 返回:
(int)夹爪的当前位置数据
get_gripper_status()
- 功能: 获取夹爪的当前状态
- 参数: 无
- 返回:
(int)0-30: 正在运动1: 停止运动,未检测到夹到物体2: 停止运动,检测到夹到了物体3: 检测到夹到物体以后,物体掉落
get_gripper_speed()
- 功能: 获取夹爪的当前速度
- 参数: 无
- 返回:
(int)夹爪的当前速度
get_gripper_P()
- 功能: 获取夹爪PID的P值
- 参数: 无
- 返回:
(int)夹爪PID的P值
get_gripper_I()
- 功能: 获取夹爪PID的I值
- 参数: 无
- 返回:
(int)夹爪PID的I值
get_gripper_D()
- 功能: 获取夹爪PID的D值
- 参数: 无
- 返回:
(int)夹爪PID的D值
get_gripper_cw()
- 功能: 获取夹爪顺时针可运行误差
- 参数: 无
- 返回:
(int)夹爪顺时针可运行误差
get_gripper_cww()
- 功能: 获取夹爪逆时针可运行误差
- 参数: 无
- 返回:
(int)夹爪逆时针可运行误差
get_gripper_mini_pressure()
- 功能: 获取夹爪最小启动力
- 参数: 无
- 返回:
(int)夹爪最小启动力
get_gripper_io_open_value()
- 功能: 获取夹爪Io张开角度
- 参数: 无
- 返回:
(int)夹爪Io张开角度
get_gripper_io_close_value()
- 功能: 获取夹爪Io闭合角度
- 参数: 无
- 返回:
(int)获取夹爪Io闭合角度
get_gripper_queue_count()
- 功能: 获取夹爪当前队列的数据量
- 参数: 无
- 返回:
(int)夹爪当前队列的数据量
get_gripper_vir_pos()
- 功能: 获取夹爪舵机虚位数值
- 参数: 无
- 返回:
(int)夹爪舵机虚位数值
get_gripper_protection_current()
- 功能: 获取夹爪夹持电流
- 参数: 无
- 返回:
(int)夹爪夹持电流
set_gripper_Id(value)
- 功能: 设置夹爪ID号
- 参数:
value:(int)夹爪ID,取值范围1-254
- 返回:
(int)0-10: 失败1: 成功
set_gripper_baud(value)
- 功能: 设置夹爪波特率
- 参数:
value:(int)夹爪波特率,取值范围0-50: 1152001: 10000002: 576003: 192004: 96005: 4800
- 返回:
(int)0-10: 失败1: 成功
set_gripper_enable(value)
- 功能: 设置夹爪使能状态
- 参数:
value:(int)使能状态,取值范围0-10: 掉使能1: 上使能
- 返回:
(int)0-10: 失败1: 成功
set_gripper_value(value,speed)
- 功能: 设置夹爪以指定的速度转动到指定的位置
- 参数:
value:(int)位置,取值范围0-100speed:(int)速度,取值范围1-100
- 返回:
(int)0-10: 失败1: 成功
set_gripper_calibration()
- 功能: 设置夹爪零位校准
- 参数: 无
- 返回:
(int)0-10: 失败1: 成功
set_gripper_P(value)
- 功能: 设置夹爪PID的P值
- 参数:
value:(int)P值,取值范围0-254
- 返回:
(int)0-10: 失败1: 成功
set_gripper_I(value)
- 功能: 设置夹爪PID的I值
- 参数:
value:(int)I值,取值范围0-254
- 返回:
(int)0-10: 失败1: 成功
set_gripper_D(value)
- 功能: 设置夹爪PID的D值
- 参数:
value:(int)D值,取值范围0-254
- 返回:
(int)0-10: 失败1: 成功
set_gripper_cw(value)
- 功能: 设置夹爪顺时针可运行误差
- 参数:
value:(int)误差,取值范围0-16
- 返回:
(int)0-10: 失败1: 成功
set_gripper_cww(value)
- 功能: 设置夹爪逆时针可运行误差
- 参数:
value:(int)误差,取值范围0-16
- 返回:
(int)0-10: 失败1: 成功
set_gripper_mini_pressure(value)
- 功能: 设置夹爪最小启动力
- 参数:
value:(int)最小启动力,取值范围0-254
- 返回:
(int)0-10: 失败1: 成功
set_gripper_torque(value)
- 功能: 设置夹爪扭矩
- 参数:
value:(int)扭矩,取值范围0-100
- 返回:
(int)0-10: 失败1: 成功
set_gripper_output(value)
- 功能: 设置夹爪IO
参数:
value:(int)夹爪IO,取值范围0-30: out1 off,out2 off1: out1 on,out2 off2: out1 off,out2 on3: out1 on,out2 on
返回:
(int)0-10: 失败1: 成功
set_gripper_io_open_value(value)
- 功能: 设置夹爪Io张开位置
- 参数:
value:(int)位置,取值范围0-100
- 返回:
(int)0-10: 失败1: 成功
set_gripper_io_close_value(value)
- 功能: 设置夹爪Io闭合位置
- 参数:
value:(int)位置,取值范围0-100
- 返回:
(int)0-10: 失败1: 成功
set_gripper_speed(speed)
- 功能: 设置夹爪速度
- 参数:
speed:(int)速度,取值范围1-100
- 返回:
(int)0-10: 失败1: 成功
set_abs_gripper_value(value,speed)
- 功能: 设置夹爪以指定的速度转动到指定的绝对位置
- 参数:
value:(int)位置,取值范围1-100speed:(int)速度,取值范围1-100
- 返回:
(int)0-10: 失败1: 成功
set_gripper_vir_pos(value)
- 功能: 设置夹爪舵机虚位数值
- 参数:
value:(int)虚位,取值范围0-100
- 返回:
(int)0-10: 失败1: 成功
set_gripper_protection_current(value)
- 功能: 设置夹爪夹持电流
- 参数:
value:(int)虚位,取值范围1-254
- 返回:
(int)0-10: 失败1: 成功
set_gripper_pause()
- 功能: 设置夹爪暂停运动
- 备注: 只对set_abs_gripper_value()生效
- 参数: 无
- 返回:
(int)0-10: 失败1: 成功
set_gripper_resume()
- 功能: 设置夹爪恢复运动
- 备注: 只对set_abs_gripper_value()生效
- 参数: 无
- 返回:
(int)0-10: 失败1: 成功
set_gripper_stop()
- 功能: 设置夹爪停止运动,并清空消息队列
- 备注: 只对set_abs_gripper_value()生效
- 参数: 无
- 返回:
(int)0-10: 失败1: 成功
测试程序
from elegripper import Gripper
import time
if __name__=="__main__":
g=Gripper("COM27",baudrate=115200,id=14)##填写实际的串口号和波特率和夹爪ID
print("夹爪的实际ID为:",g.get_gripper_Id())
print(g.set_gripper_value(100,100))
time.sleep(2)
print(g.set_gripper_value(0,100))
time.sleep(2)