myArm-300 Moveit
mycobot_ros has now integrated the MoveIt part.
Click the ROS1 Shell icon on the desktop or the corresponding icon in the lower bar of the desktop to open the ROS1 environment terminal:



Then run the command:
roslaunch myarm_moveit demo.launch
The running effect is as follows:
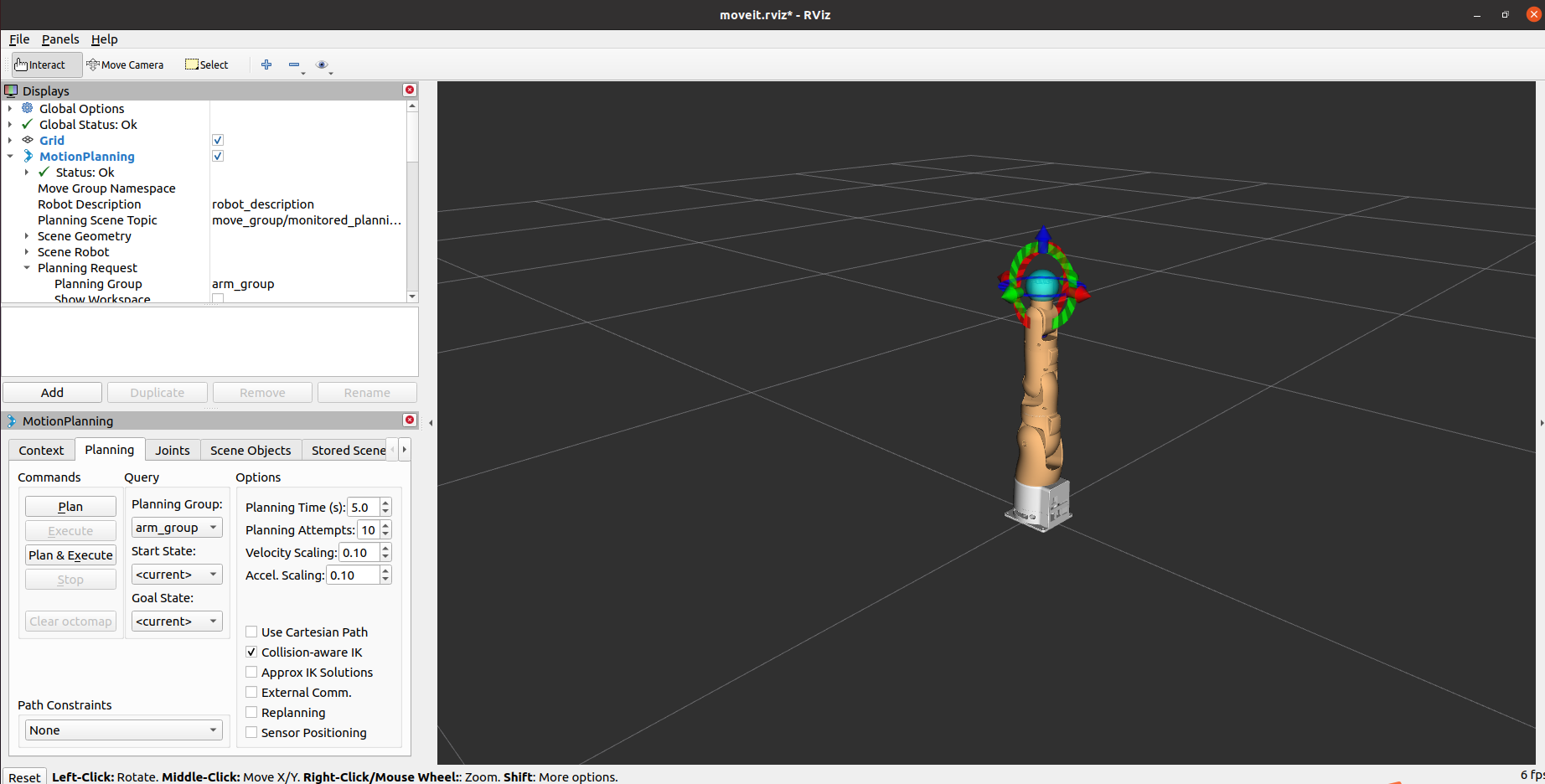
It can be planned and executed to demonstrate the effect:
If you need to let the real robotic arm execute the plan synchronously, you need to open another ROS1 environment terminal:
Then run the command:
# The default serial port name of myArm-300 is "/dev/ttyAMA0", and the baud rate is 115200".
rosrun myarm_moveit sync_plan.py _port:=/dev/ttyAMA0 _baud:=115200
Then plan and execute again to demonstrate the effect: