Hardware Structure
1 Robot Torso Construction
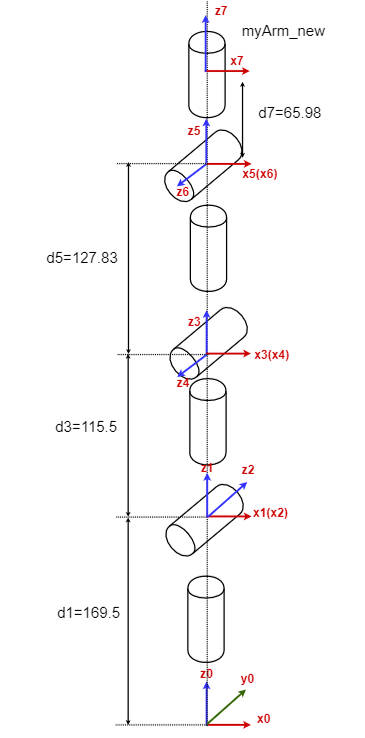
1.1 Components of the Robot Joints
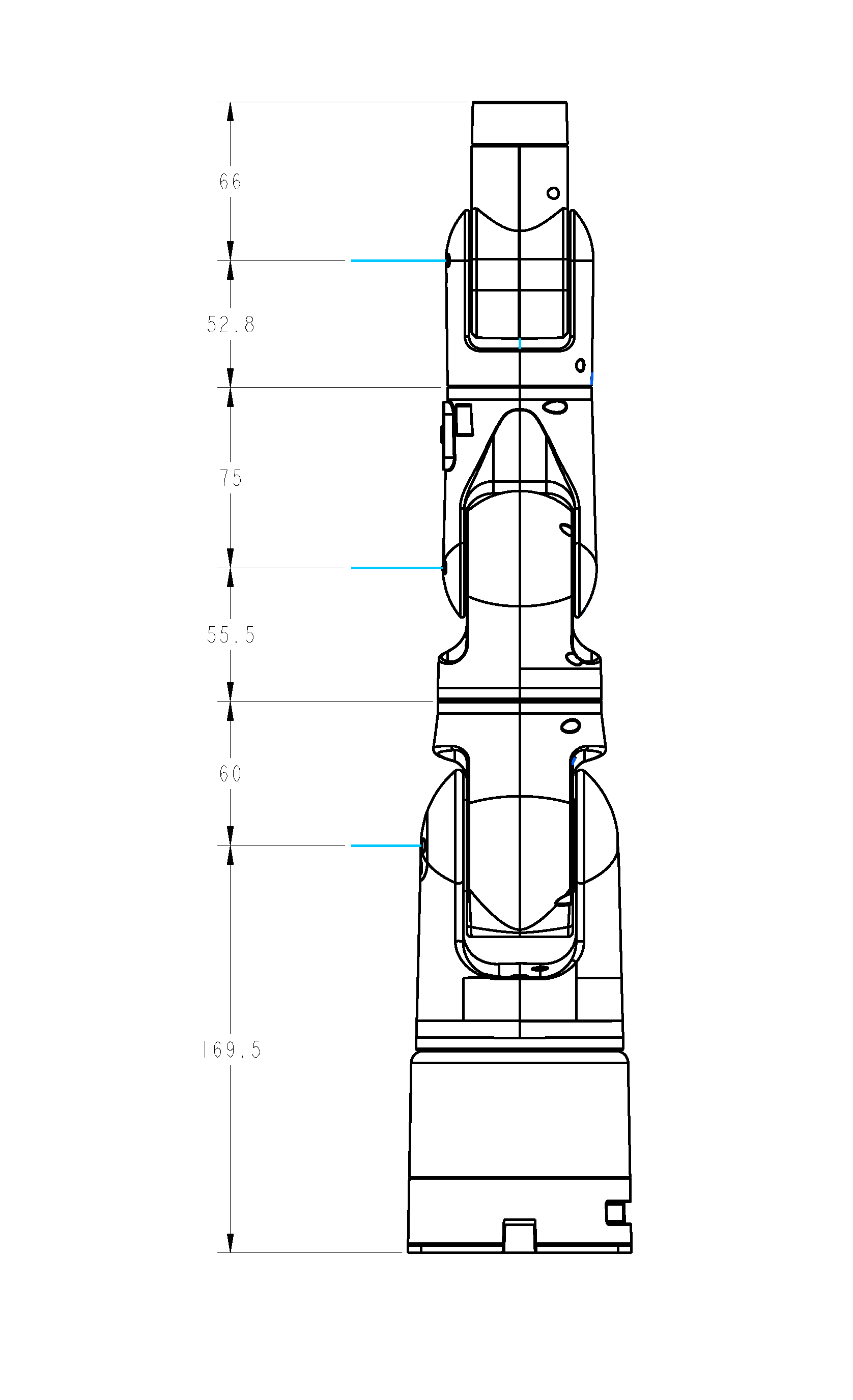
Note: The 7th axis is an end rotation joint with no actual length; the diagram only indicates the lengths for joints 1-6. The joints are ordered from bottom to top as 1-7.
1.2 Working Space Range
Operational Space
The operational space of myArm is a spherical space with a radius of 310mm centered on Axis 2.
Singular Position
When all six joints are at 0°, the robotic arm is in a singular position.
Recommended Coordinate Motion Space
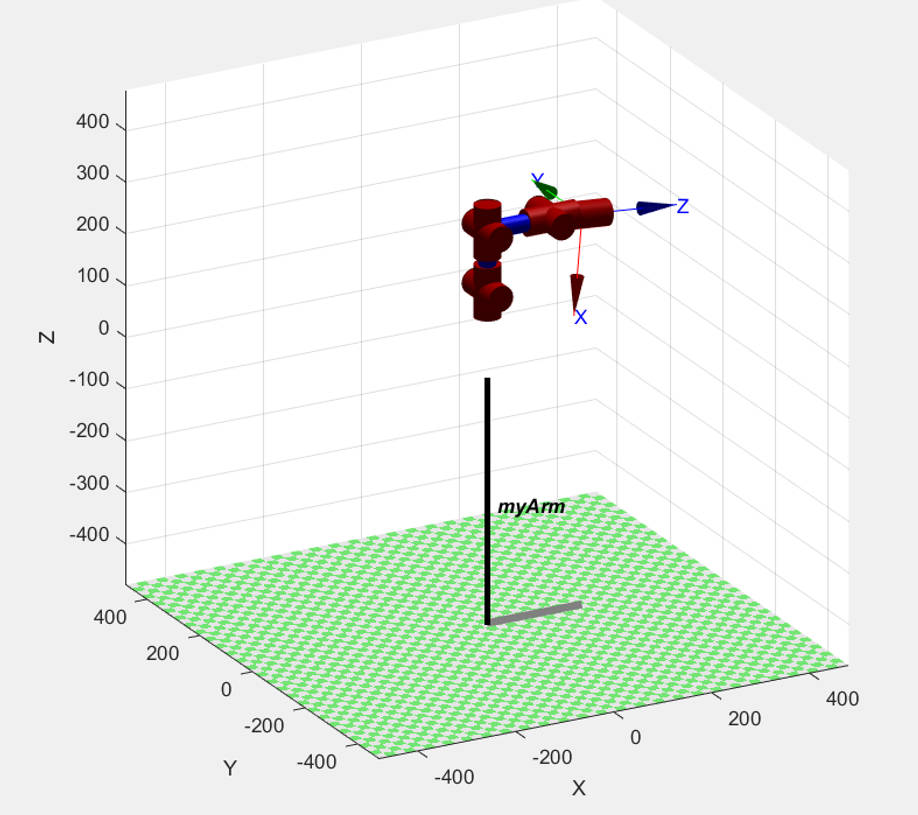
It is recommended to control the coordinates in the following posture:
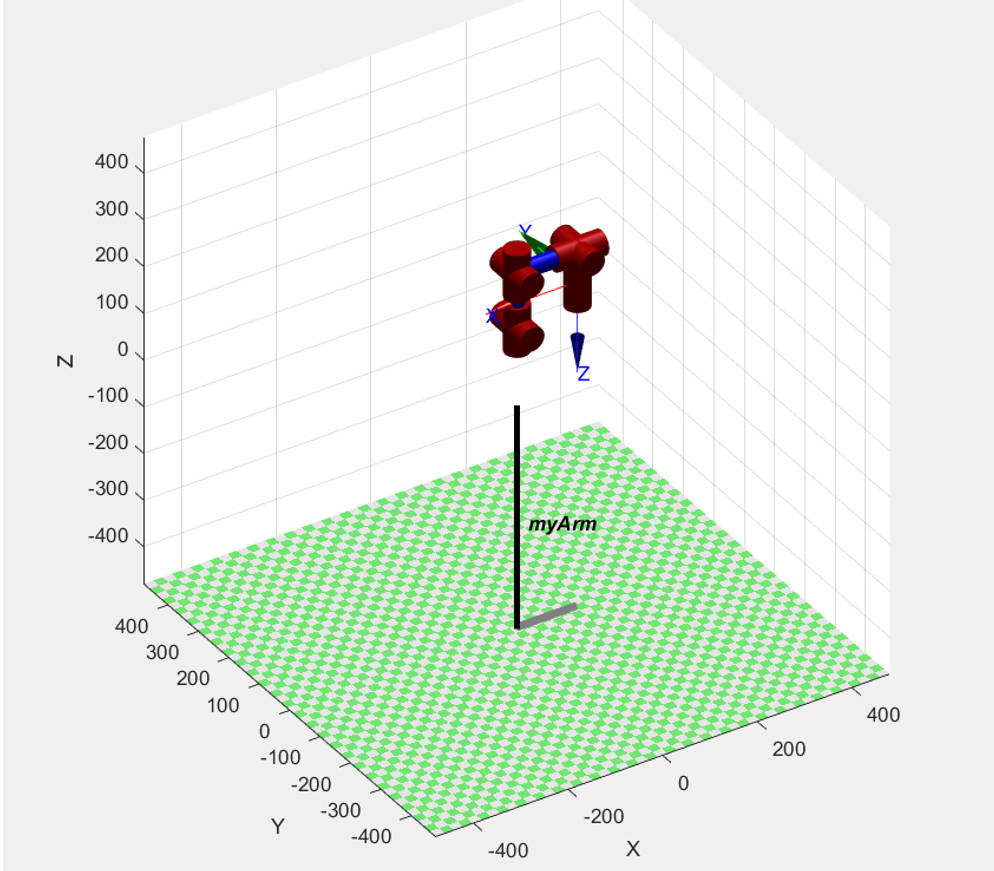
The active space under this posture is as follows:
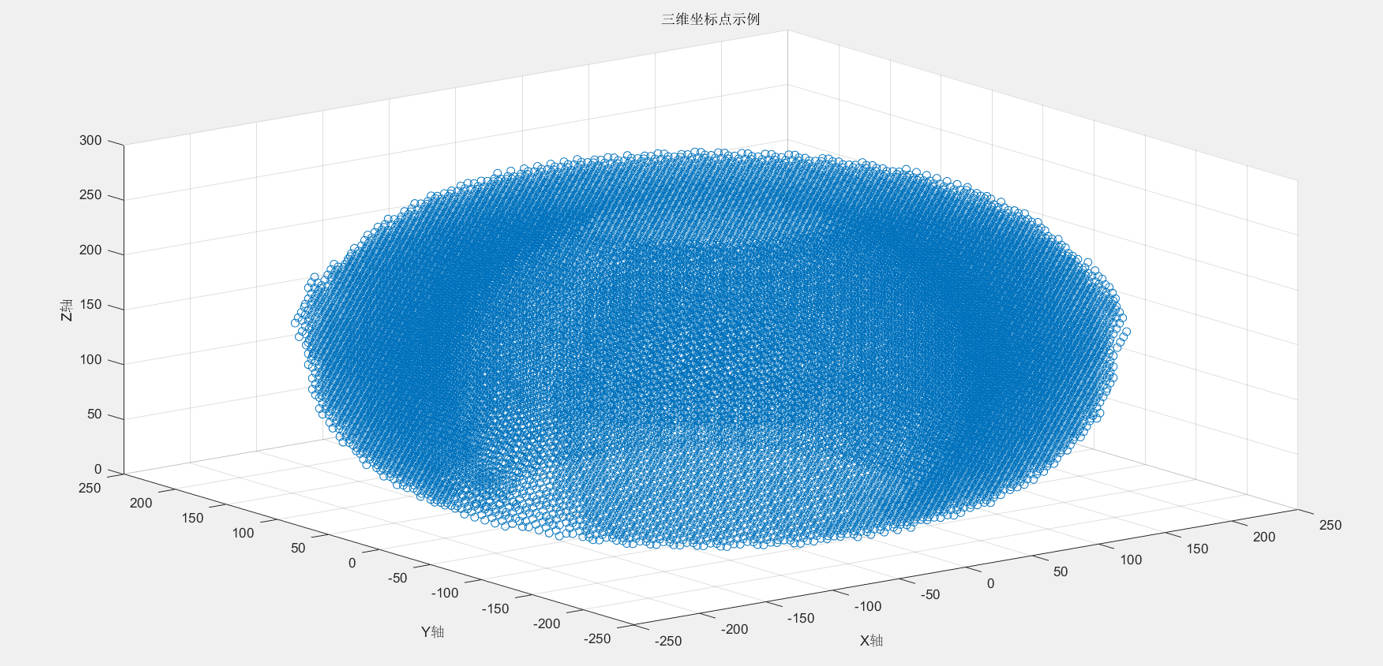
The cross-section of this active space is as follows:
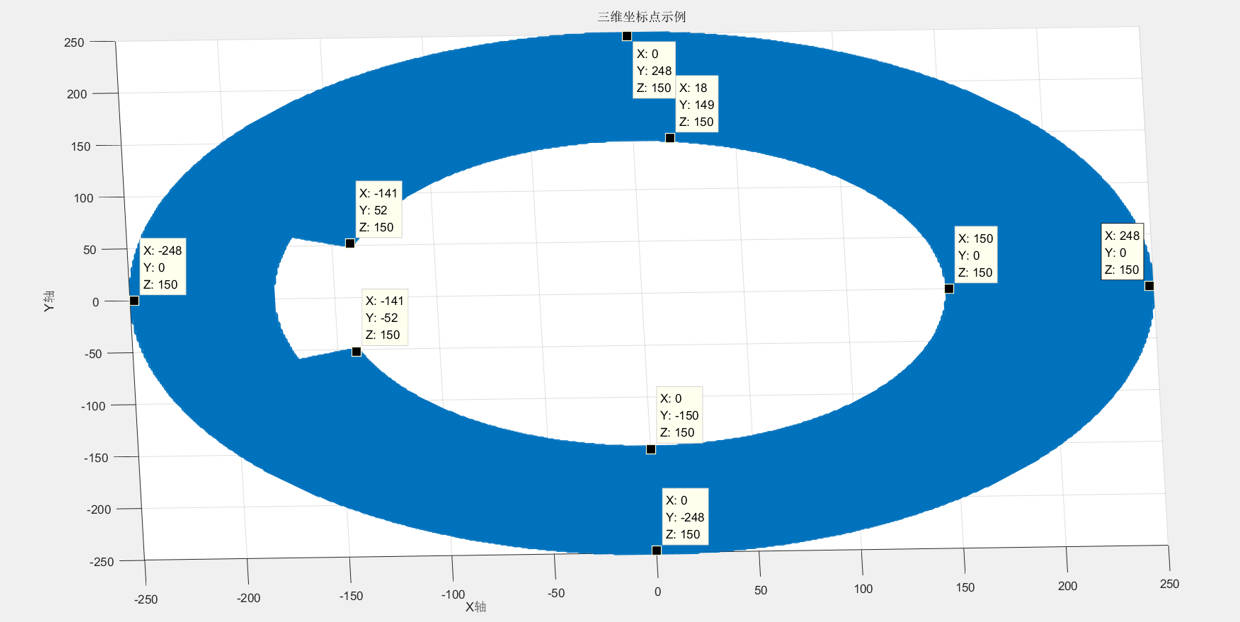
The coordinate motion range in this posture can be approximately expressed as: ( 150^2 < x^2 + y^2 < 250^2 )
1.3 Range of Joint Movement
- Joint Limitations
| Joint | Range |
|---|---|
| J1 | -160 ~ +160 |
| J2 | -80 ~ +80 |
| J3 | -165 ~ +165 |
| J4 | -100 ~ +80 |
| J5 | -165 ~ +165 |
| J6 | -110 ~ +110 |
| J7 | -165 ~ +165 |
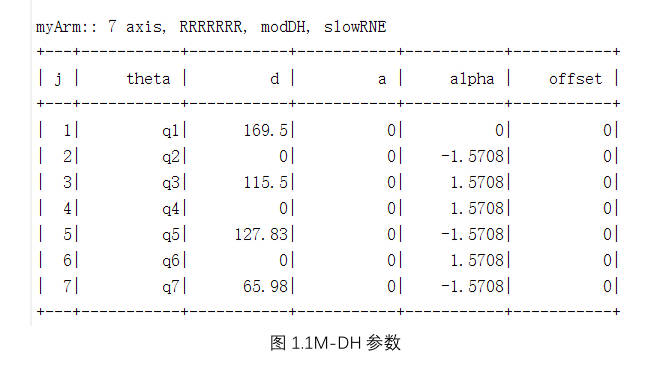
1.4 Robot Kinematics
Kinematics model
DH Parameters
2 Base and Tool Interface
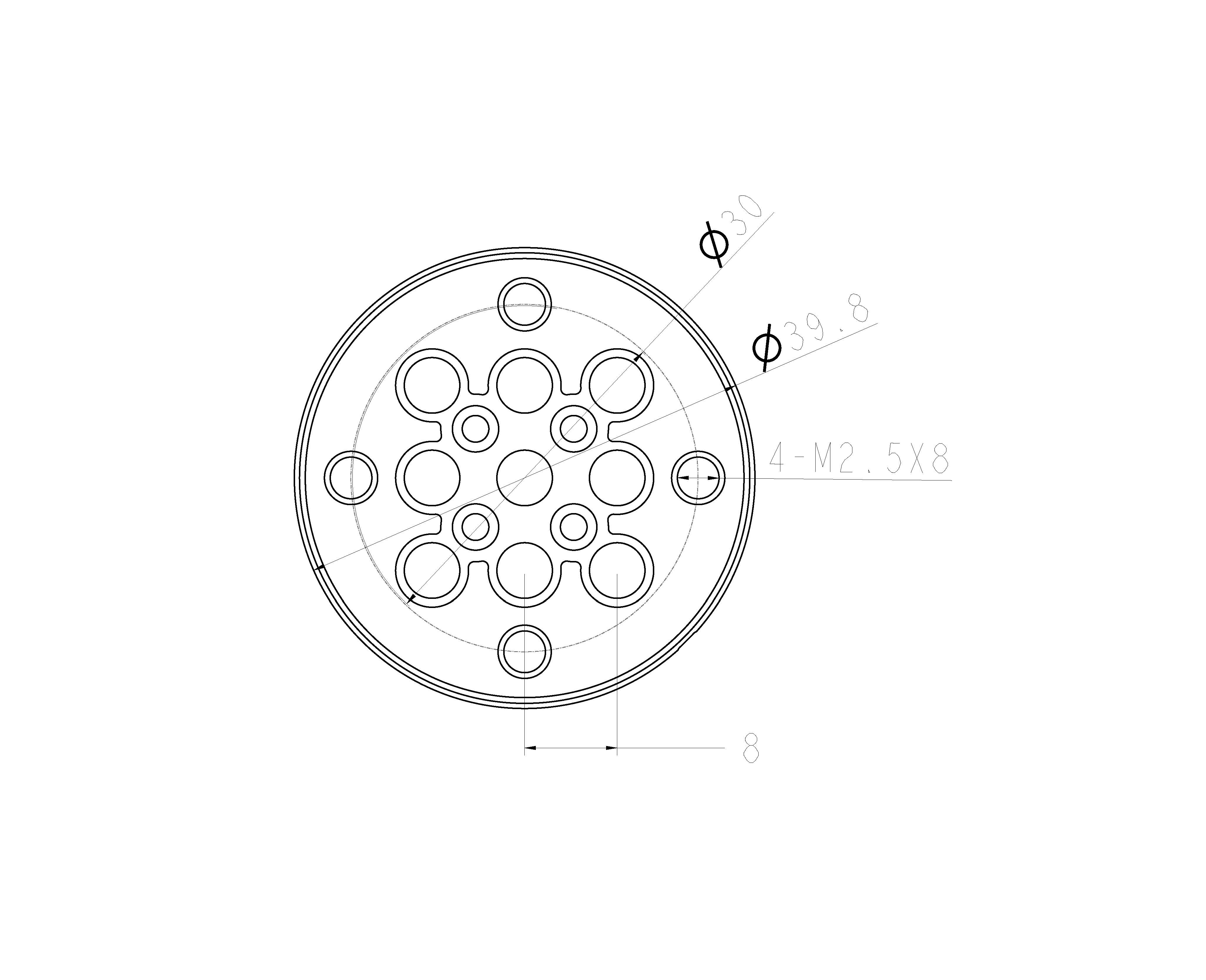
2.1 Base Fixation Interface
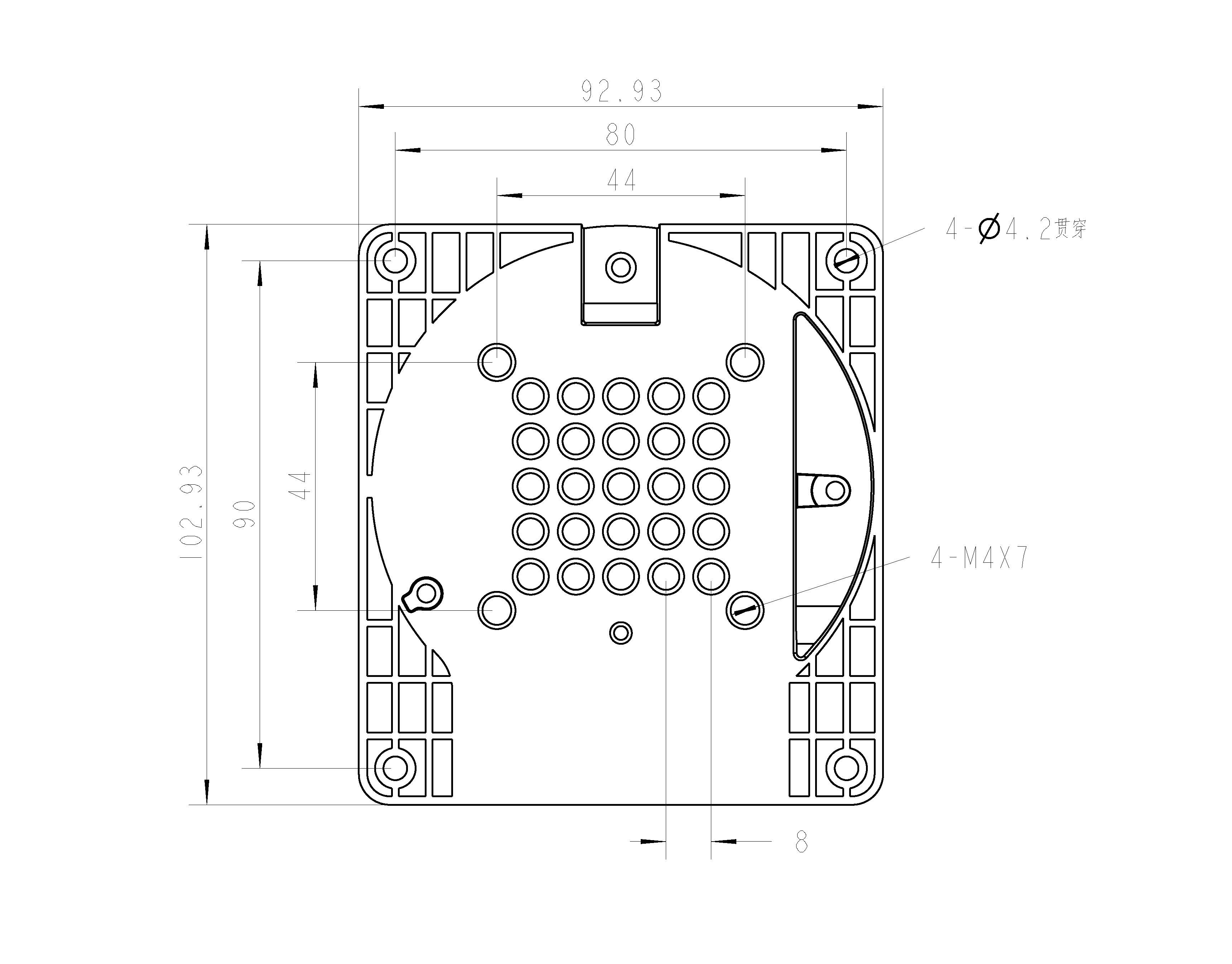
The base can be secured using various methods, currently offering LEGO connectors and screw locking options. It can be used with a G-type base or a large suction cup base.
2.2 Tool Extension Interface
The end can be secured using various methods, currently offering LEGO connectors and screw locking options. It can be used with myCobot series end accessories or user DIY accessories.
3 Precautions for Use
- Shell Material Environmental Requirements
| Working Environment | Conditions |
|---|---|
| Temperature | 0°C~45°C |
| Relative Humidity | 20%~70% |
| Indoor/Outdoor | Indoor |
| Other Requirements | - Avoid direct sunlight. - Keep away from dust, fumes, salt, metal particles, etc. - Keep away from flammable and corrosive liquids and gases. - Do not come into contact with water. - Do not transmit shocks and vibrations. - Stay away from strong electromagnetic interference sources. |