Introduction
1 Elephant Robotics
1 Company Introduction
2 Development History
3 How to Read
2 myBuddy
1 Introduction
2 Product Parameter
Product Structure Parameter
Robotic Arm Electrical Interface
3 First-time use
3 FAQ
1 How to Ask Questions Gracefully
2 Driver-related
3 Software
4 Hardware
Preparations
4 Background Knowledge
4.1 Robot Arm
4.2 Electronic Background Knowledge
4.3 Knowledge of Motor and Servo
4.4 Robot Kinematics
1 myCobot Series 6-Axis Collaborative Robotic Arm
5 Basic Usage
Safety_Instruction
5.1 myStudio
1 Environment Building
2 Burning and Updating Firmwares
5.2 myBuddy GUI Drag teach
5.3 PI Robot Instructions
1 Introduction to PI version Robot
2 Description of Basic SystemFunctions
3 Replace TF card
5.4 Downloads
Development and API
6 myBlockly
1 myBlockly Install
2 API Description
7 Python
1 Joint Control
2 Coordinate Control
3 IO Control
4 Gripper Control
5 TCP/IP
6 Bluetooth Control
7 Emotion Display
8 API Description
8 ROS
1 ROS1 Moveit
2 ROS1 Rivz
3 ROS1 Socket
4 ROS2 Rviz2
9 Image burning and system usage
9.1 What is Mirroring
9.2 Burning Mirroring
9.3 When Mirroring is Needed
10 Comment & Feedback
Published with GitBook
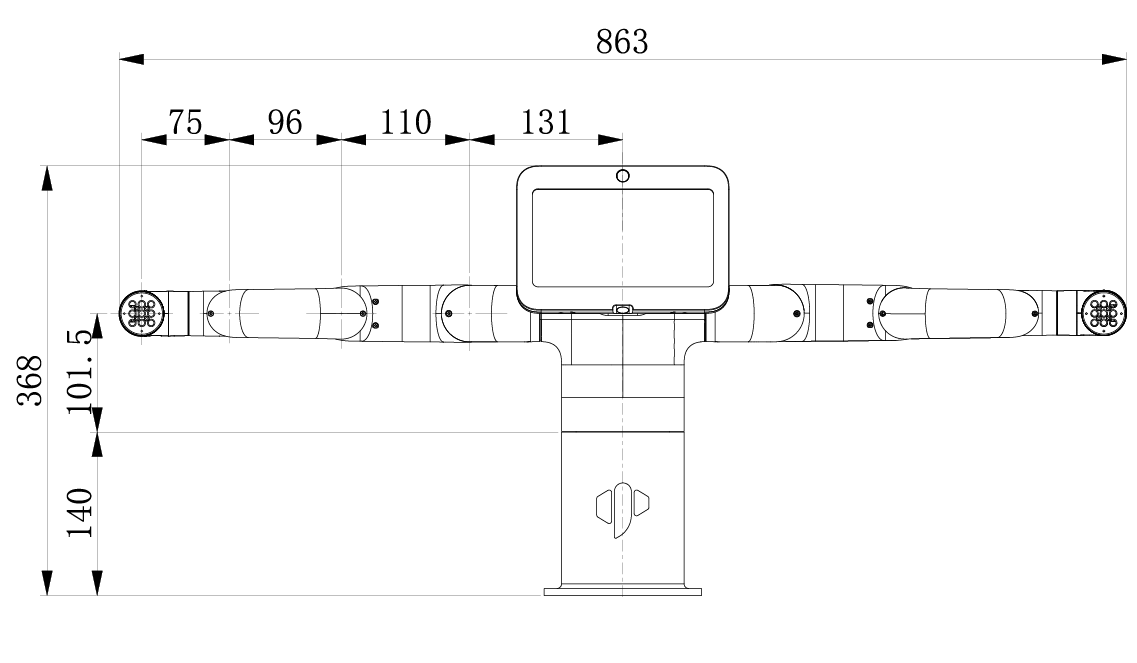
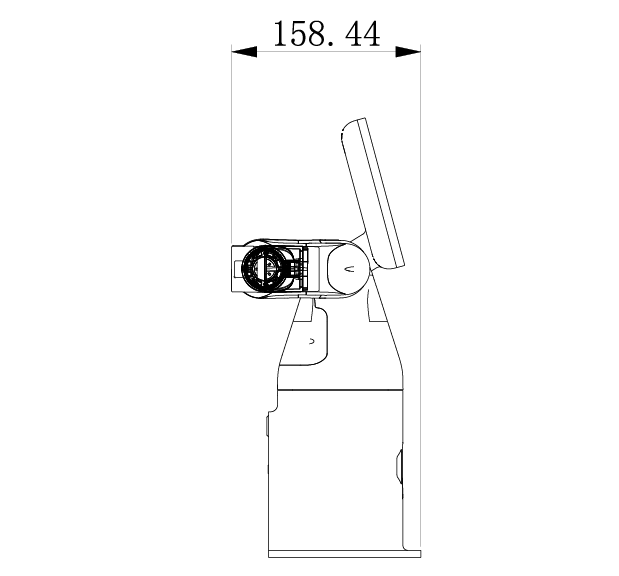
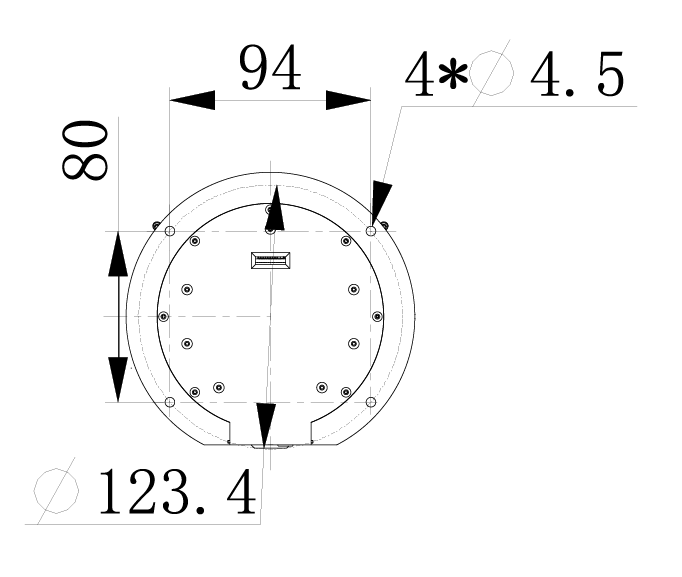
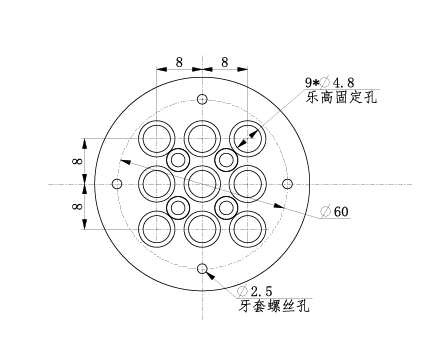
Product Structure Parameter
Standard sizes
1、 2D file
1.1 Front view
1.2 Side view
1.3 Base mounting holes
1.4 End mounting holes
2、 3D file
3D Download
Download
results matching "
"
No results matching "
"