一、仿真
我们提供一些 静态仿真 和 动态仿真, 用以和 MyController S570 交互。
1.1 静态仿真
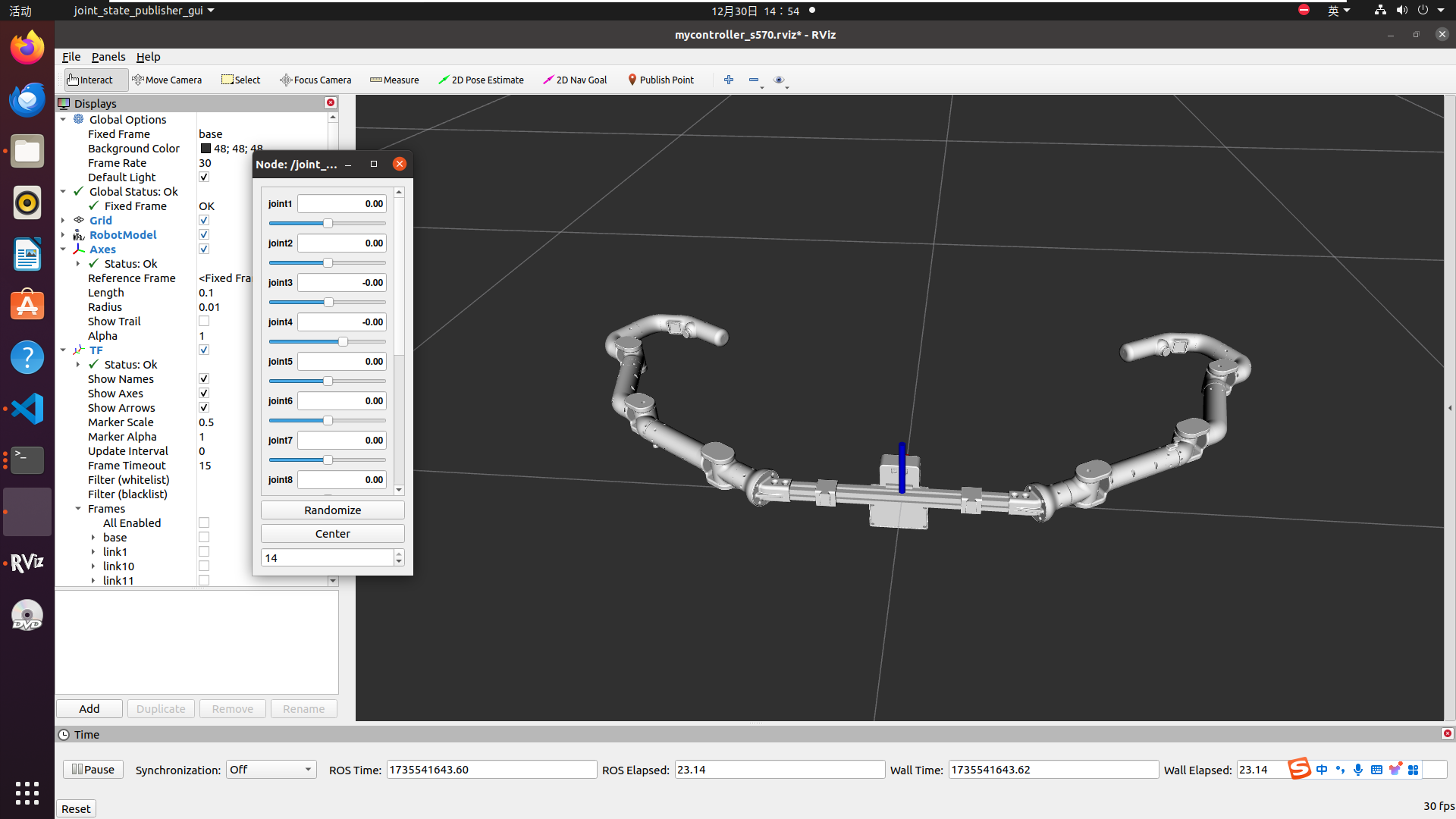
这里的静态仿真是指:用rviz中的滑动模块与仿真中的MyController S570 交互
在工作空间打开终端命令行中输入:
source devel/setup.bash # 添加环境变量
roslaunch myarm_m test02.launch
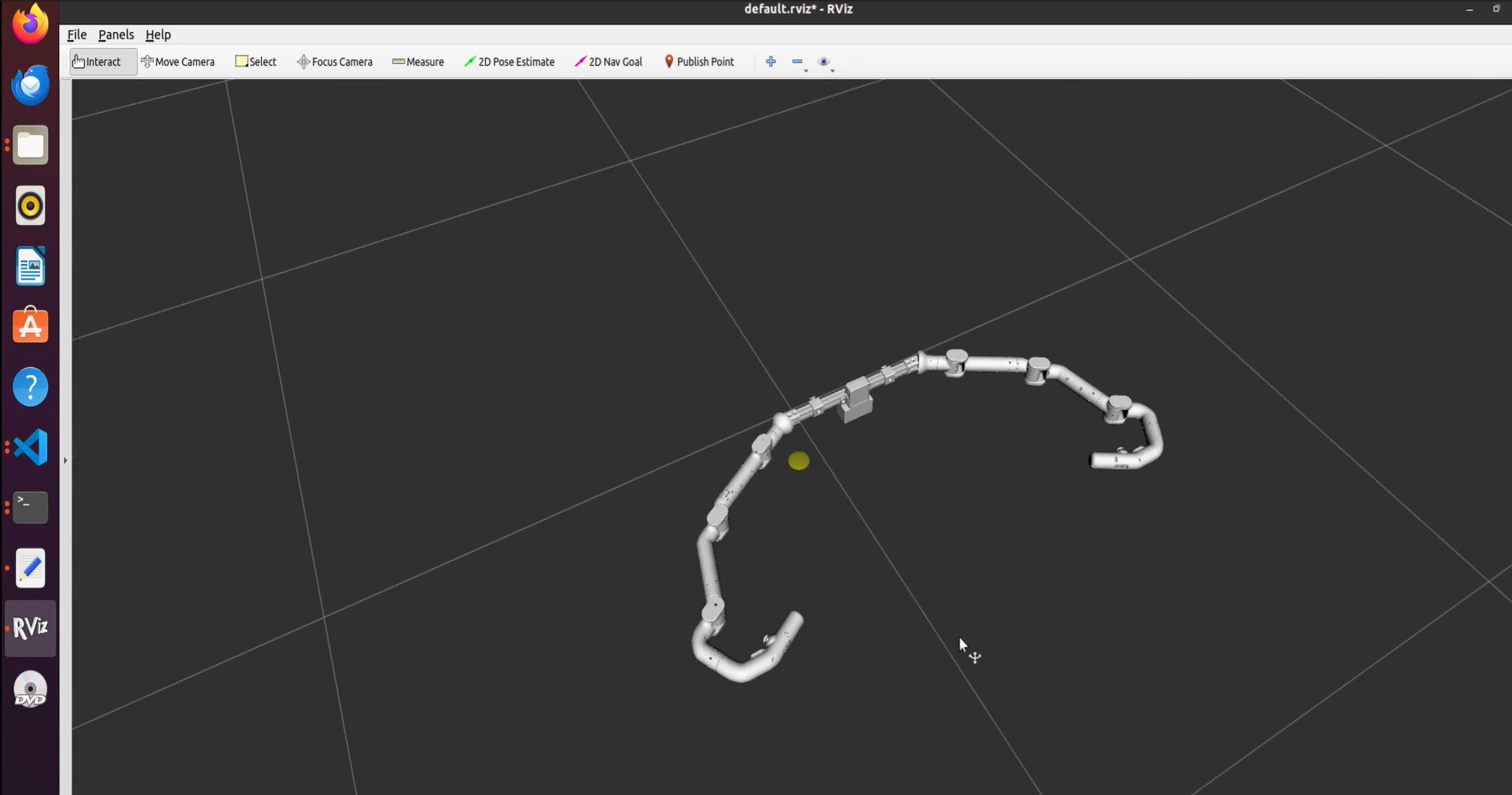
同时会打开rviz,生成MyController S570的仿真模型
1.2 动态仿真
①首先打开MyController S570上的开关,并自行检查屏幕是否显示正常(即出现每个关节的角度以及按钮的信息)
②通过串口将MyController S570与电脑连接
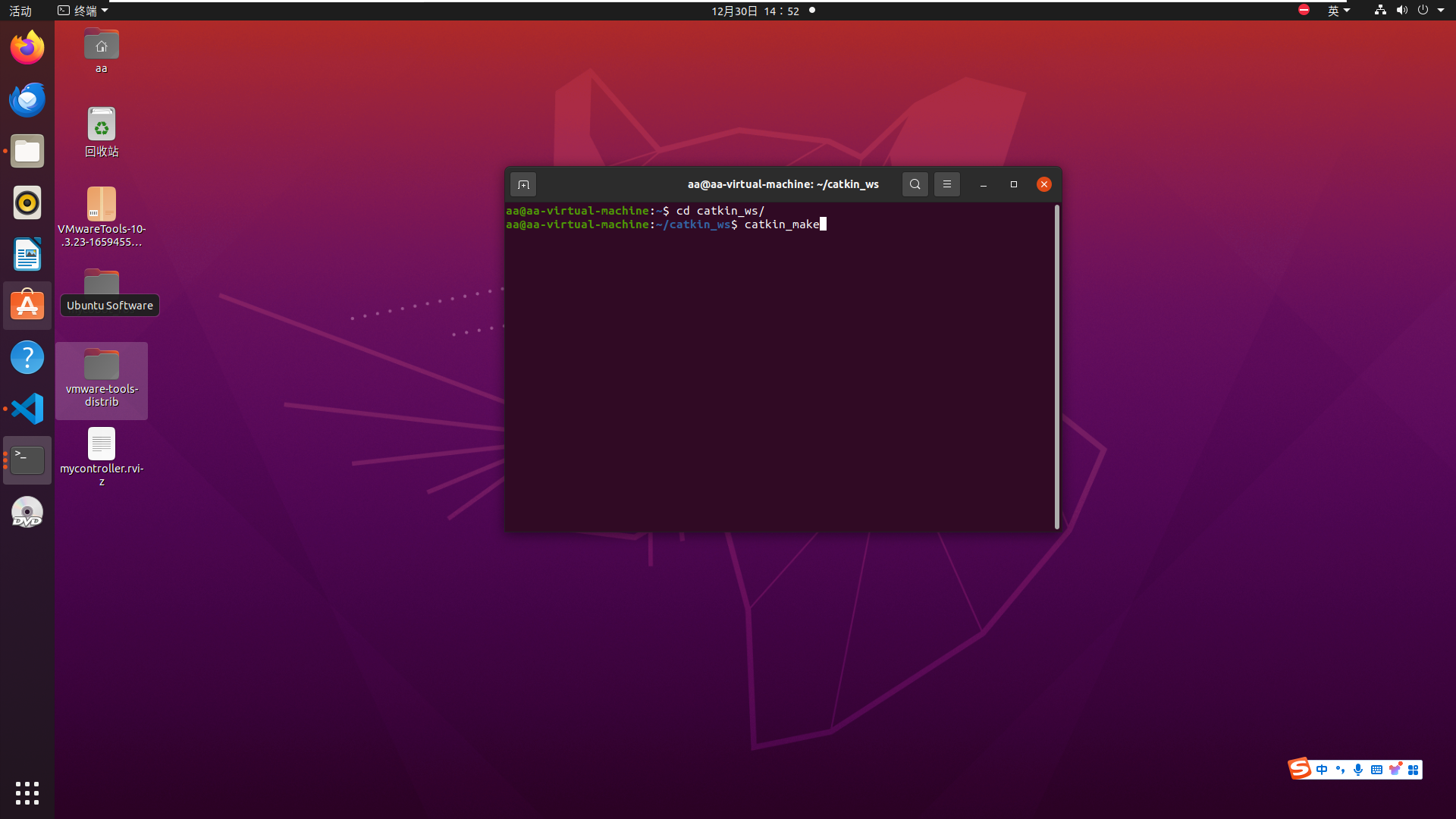
③在系统中打开终端命令行中依次输入:
cd catkin_ws
catkin_make
source devel/setup.bash
roslaunch mycontroller_s570 test.launch
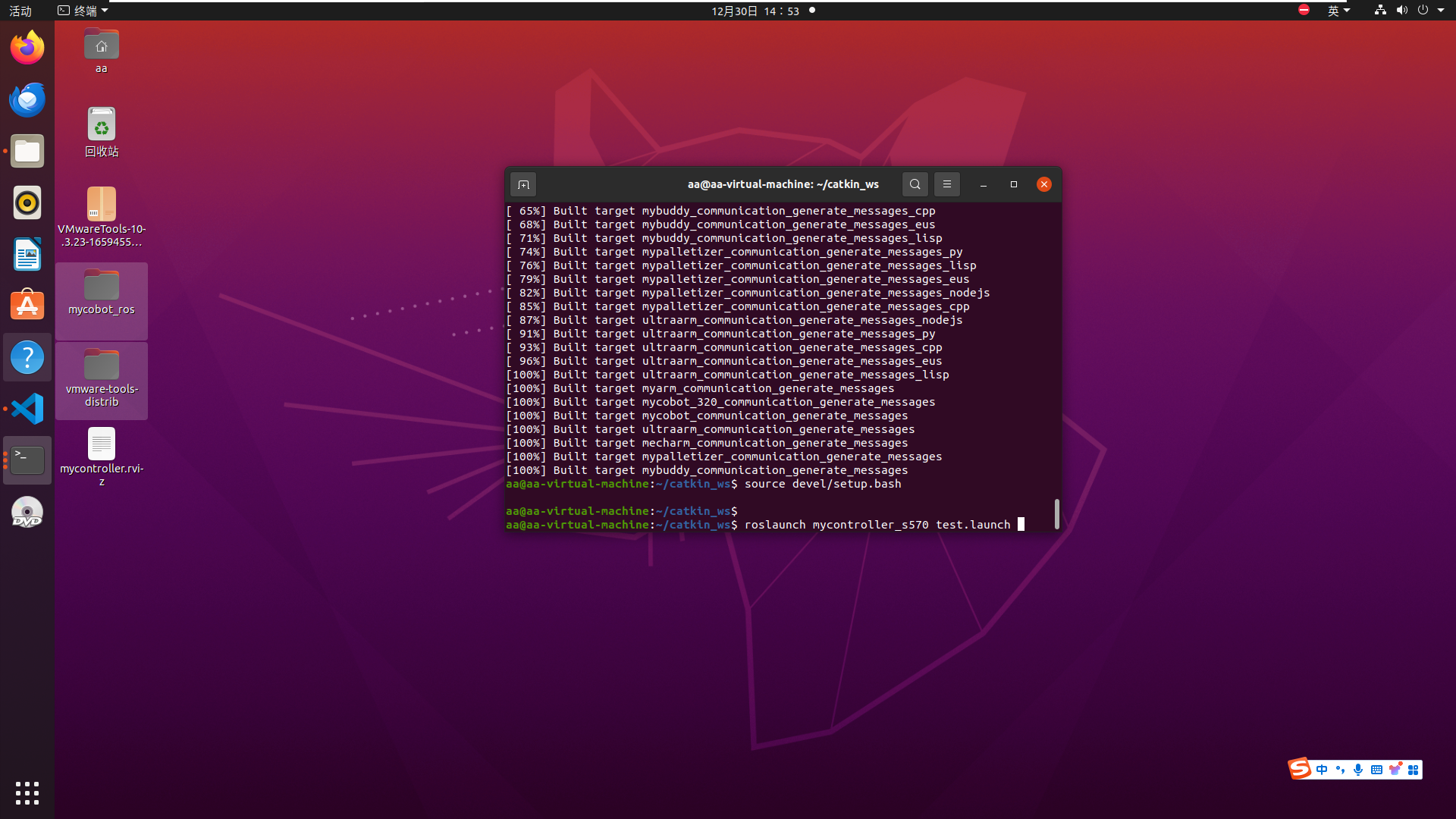
同时会打开rviz,生成MyController S570的仿真模型
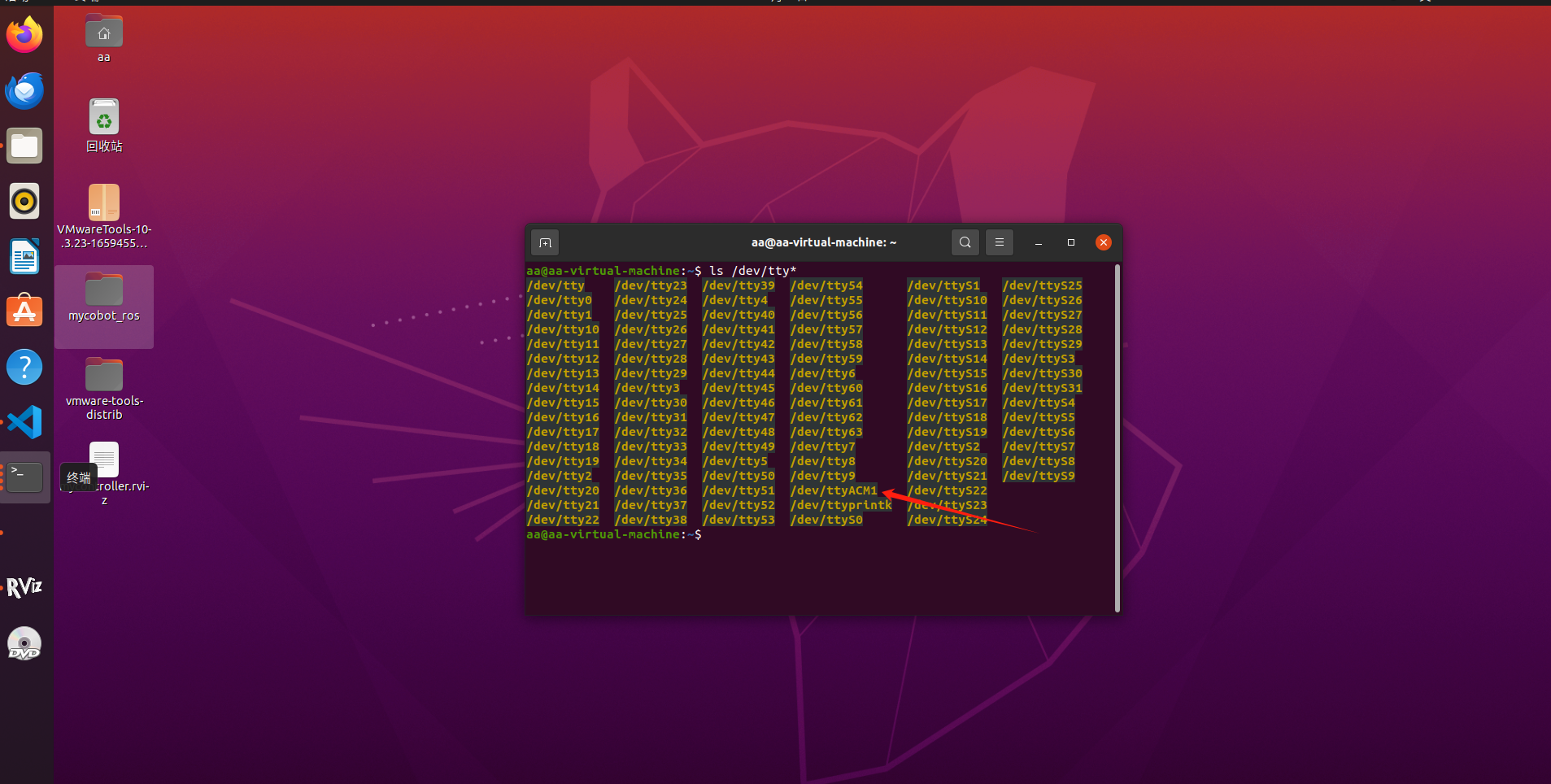
④新建一个终端并输入:(可以查看S570连接系统的串口号)
ls /dev/tty*
⑤打开脚本文件,修改串口号,并保存: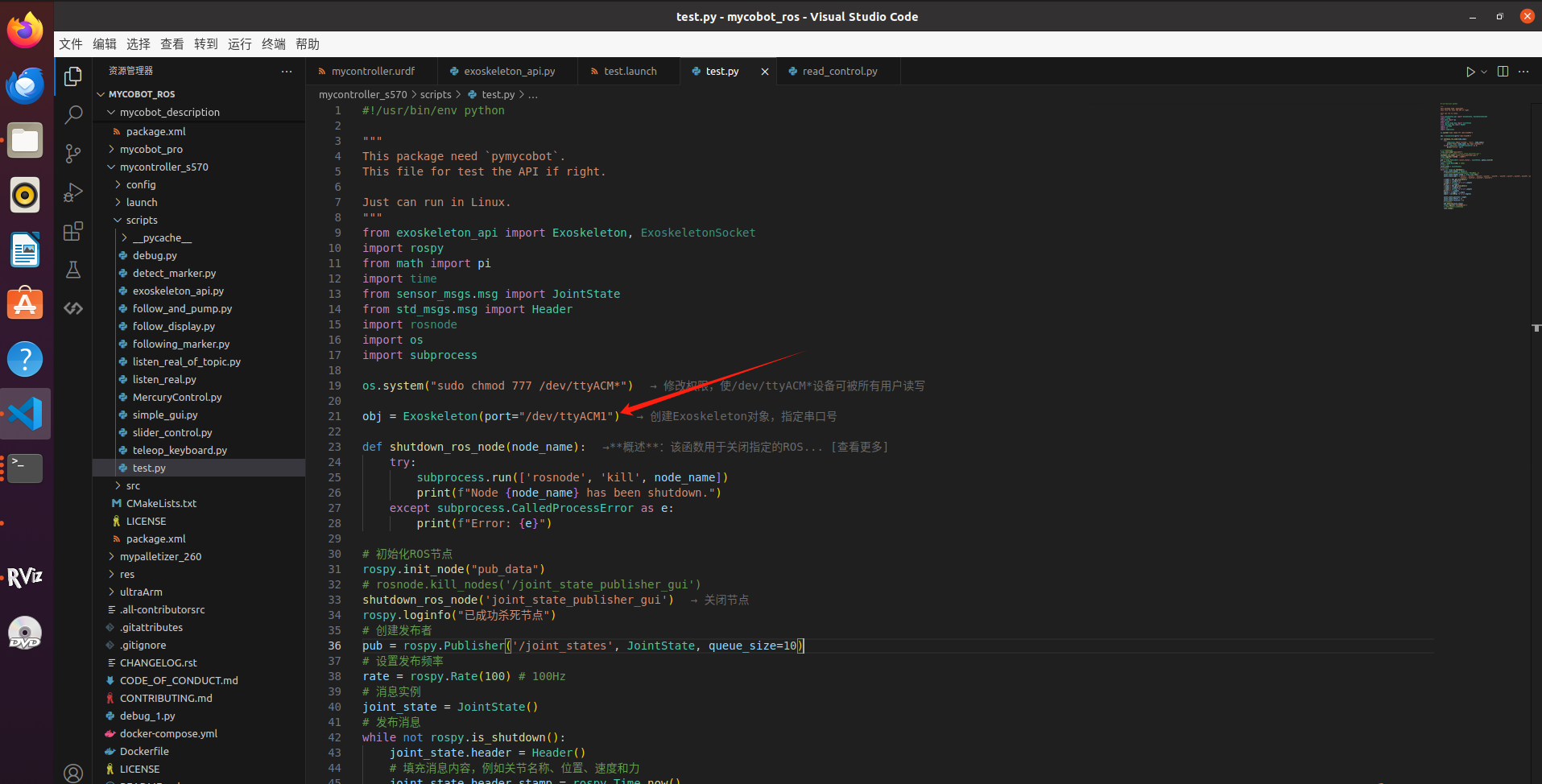
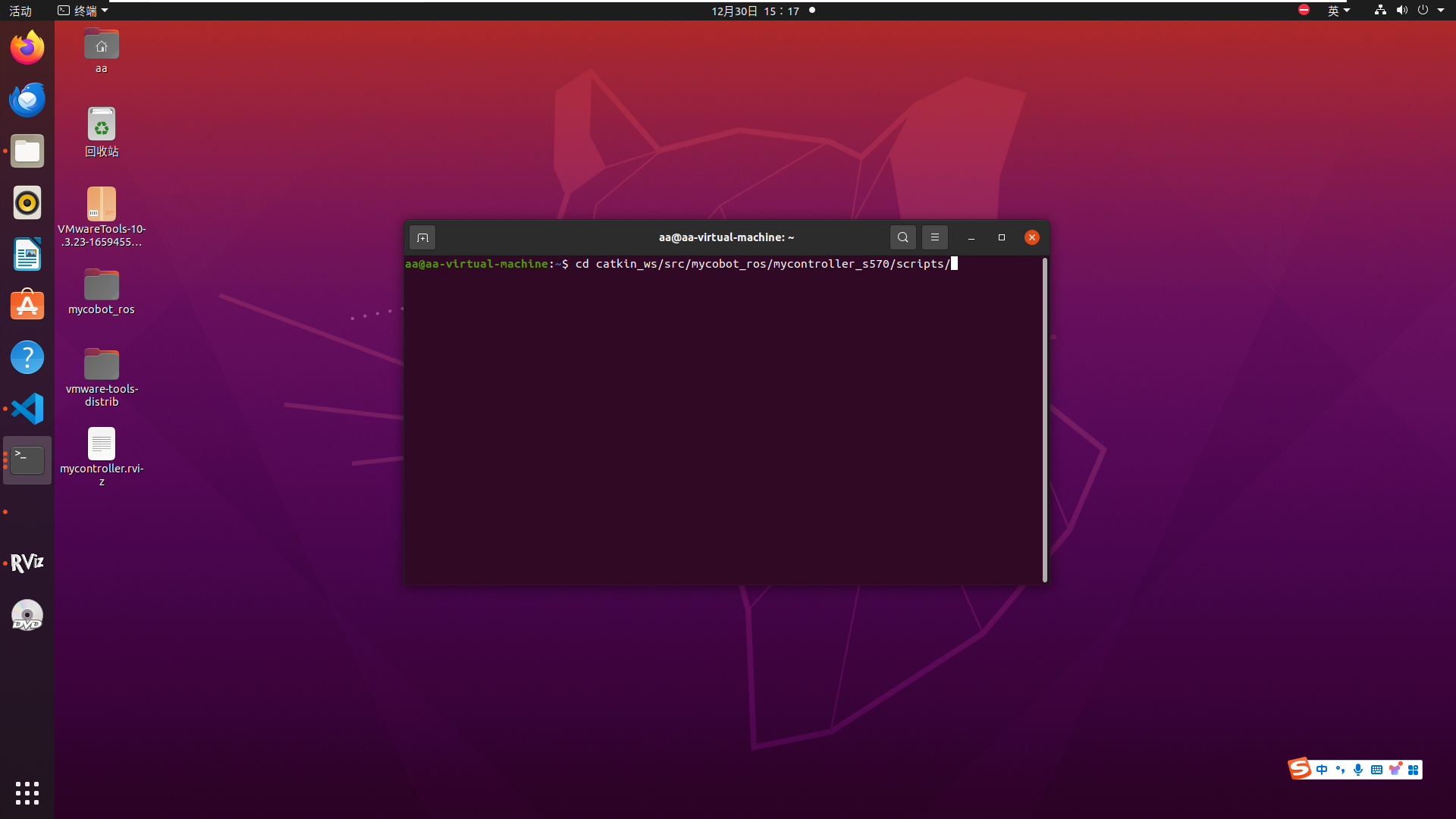
⑥新建一个终端并依次输入:
cd catkin_ws/src/mycobot_ros/mycontroller_s570/scripts
python3 test.py
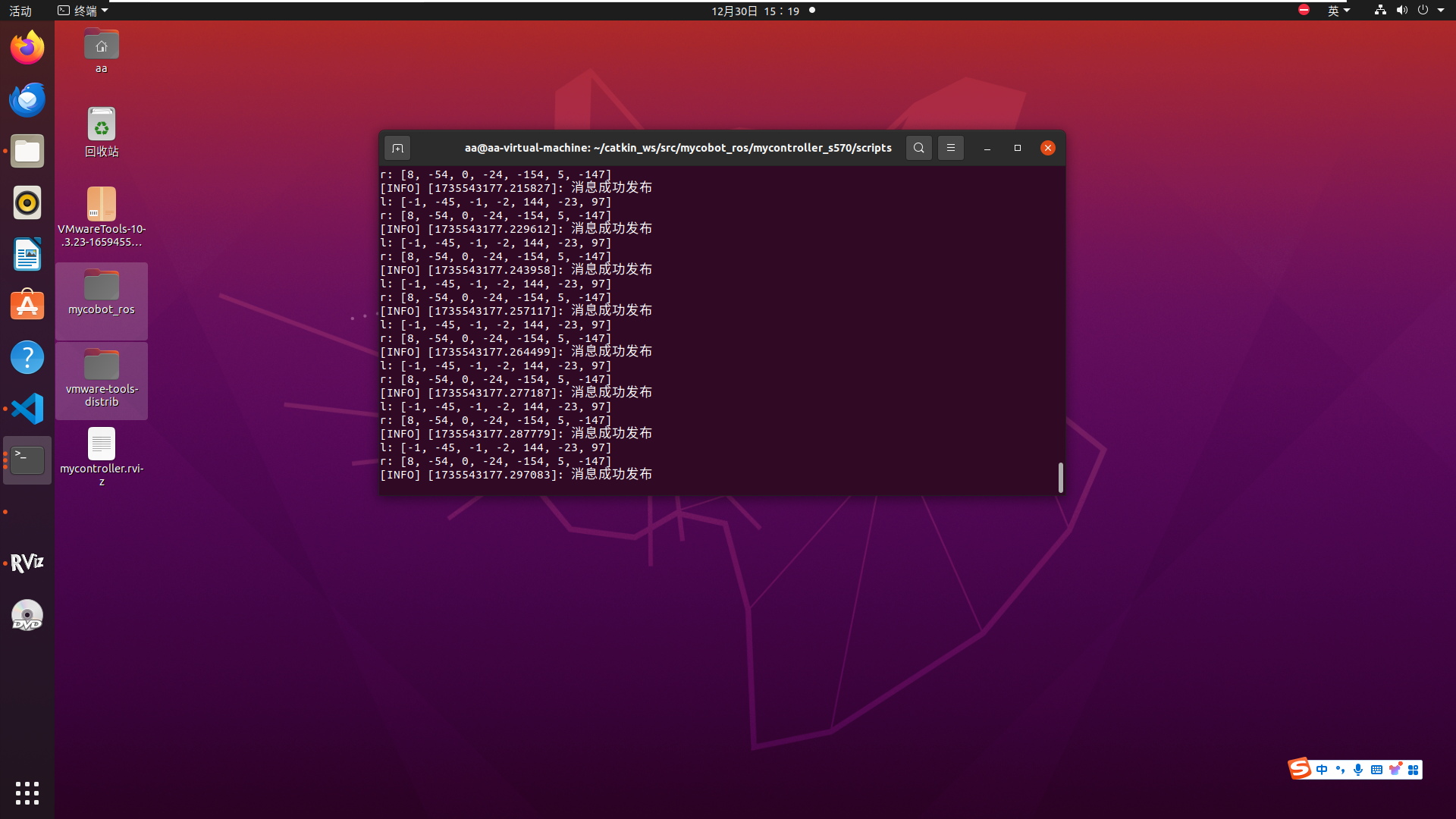
至此,外骨骼成功实现模型跟随运动
效果视频: