MyController S570 穿戴方式
1. USB 串口连接
【第一步】 使用人员先穿戴好背心并扣好,再将外骨骼固定在背心上


【第二步】 连接好之后即可打开外骨骼上红色的电源按钮,电源开启之后,外骨骼上的内置屏幕即可启动,并能看到各个关节的具体数值及按键的数值

【第三步】 通过USB转type-C的方式连接上外骨骼与机器人(注意要先通电在连机器人)
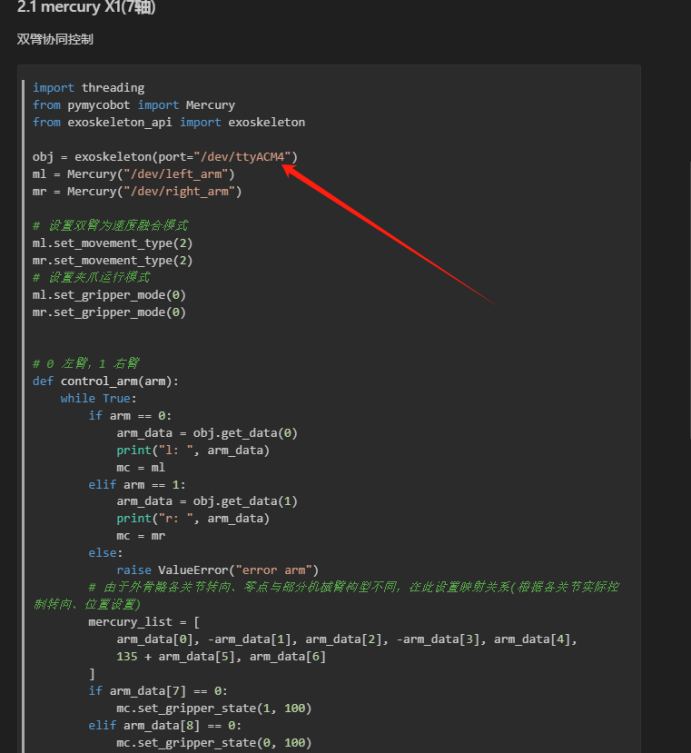
以Mercury 为例讲解选择串口并连接的方式
【第四步】连接上机械臂之后在系统中打开一个终端,并输入以下指令,并通过拔插与外骨骼连接的串口线来确定串口号

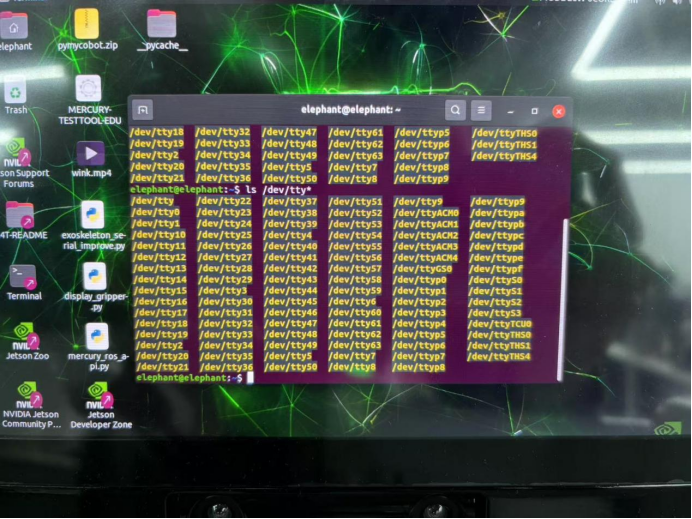
此处的串口号为:/dev/ttyACM4
串口号可能会在每次插拔或者更换串口线之后发生变化
【第五步】 下一步给串口号进行授权并修改源码中对应的串口号
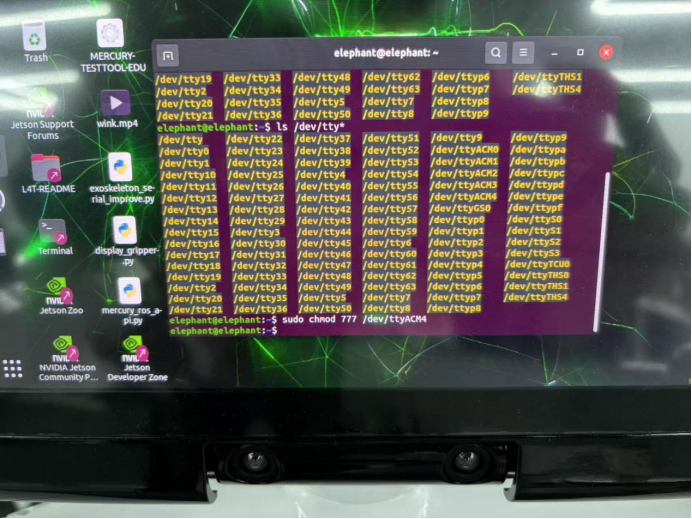
【第六步】 修改源码中对应的串口号即可
2.蓝牙连接
开机情况:
通信: 默认开启串口
UI: 开机顶部栏默认会显示ip以及端口号,随后一条绿色横线隔开,其下数据为当前各个关节的角度,关节角度每个机械臂显示7个,同时每个机械臂具有两个按键和一个遥感,在关节的角度数据下显示按键状态和遥感的平面坐标
按键说明: 按下第一个按键开启wlan服务,按下第二个按键开启蓝牙服务,按下第三个按键关闭当前服务。
wlan和蓝牙不能同时存在,这两个功能进行切换时必须要先关闭当前正在进行的服务。但是无论是在使用蓝牙功能还是在使用wlan的情况下都可以使用串口通信,换句话说,只要外骨骼通了电,串口就可以使用,不受任何的限制。
蓝牙服务界面说明: 按下第二个按键后,其余部分不变。顶部文字替换为:BT:Disconnect Name:BLE,此时处于已经创建蓝牙服务但是未连接状态。当手机与外骨骼进行蓝牙连接后,顶部文字替换为: BT:Connected Name:BLE,若未连接上,将一直处于已经创建蓝牙服务但是未连接状态。蓝牙服务关闭后显示为开机状态,参考开机情况说明。
Wlan服务界面说明: 按下第一个按键后,其余部分不变。顶部文字的ip地址更改为设定好的ip地址,此时电脑成功或失败连接后顶部文字也不会有变化。服务关闭后显示为开机状态,参考开机情况说明
串口,wlan,蓝牙服务协议说明: 可以使用协议文档中的命令发送数据,若使用蓝牙通信,请将手机中的蓝牙调试助手的MTU(最大传输单元)设置为50及以上