屏幕控制
myCobot Pro 力控夹爪带有屏幕显示功能,并且屏幕下带有按键方便对屏幕的操 控,通过对界面的选择,可以更加便捷的操控夹爪与了解夹爪信息。屏幕信息和 整体功能描述
| 界面 | 功能 |
|---|---|
| 主界面 | 查看夹爪信息,如:位置(Position) 设置速度(Speed) 电流 (Current) 输入 IO(Input) 输出 IO(Output) |
| 设置界面(Setting) | 查看,设置夹爪数据 |
| 设置波特率界面(Modbus Config) | 查看和更改设备波特率 |
| IO 使能界面(IO Config) | 查看和使能 IO,默认 IO 是使能状态 |
| 夹爪控制界面(Manual Config) | Open-控制夹爪张开 Close-控制夹爪闭合 Release-夹爪不使能(这时候夹爪就不会有扭力,可以自由摆动爪) Hold - 夹爪使能(给夹爪使能,这时候夹爪存在扭力) |
| 版本信息界面(Information) | Firmware - 固件版本号 Servomotor - 夹爪版本号与夹爪 ID |
主界面
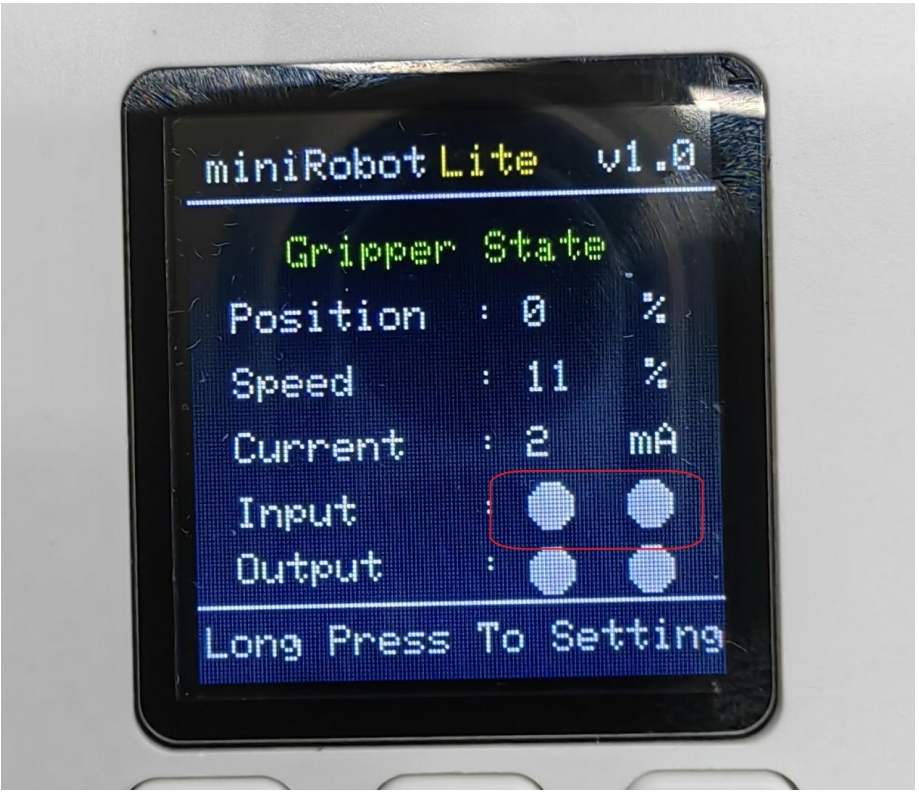
进入夹爪主界面,我们可以看到屏幕上实时获取夹爪的一些信息,这能更方 便的知道夹爪的信息。主界面主要有以下信息 如图所示

主界面上实时显示夹爪角度,速度,电流,输入输出 IO 电平
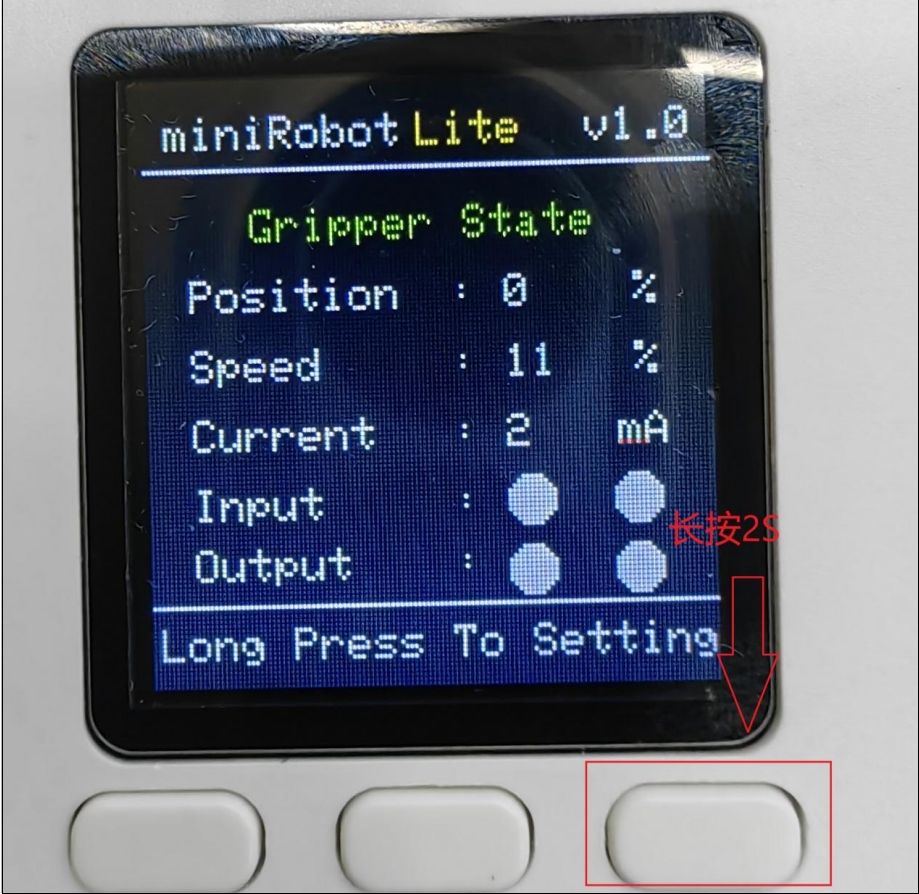
设置界面
主界面下长按确认键 2s 即可进入主界面
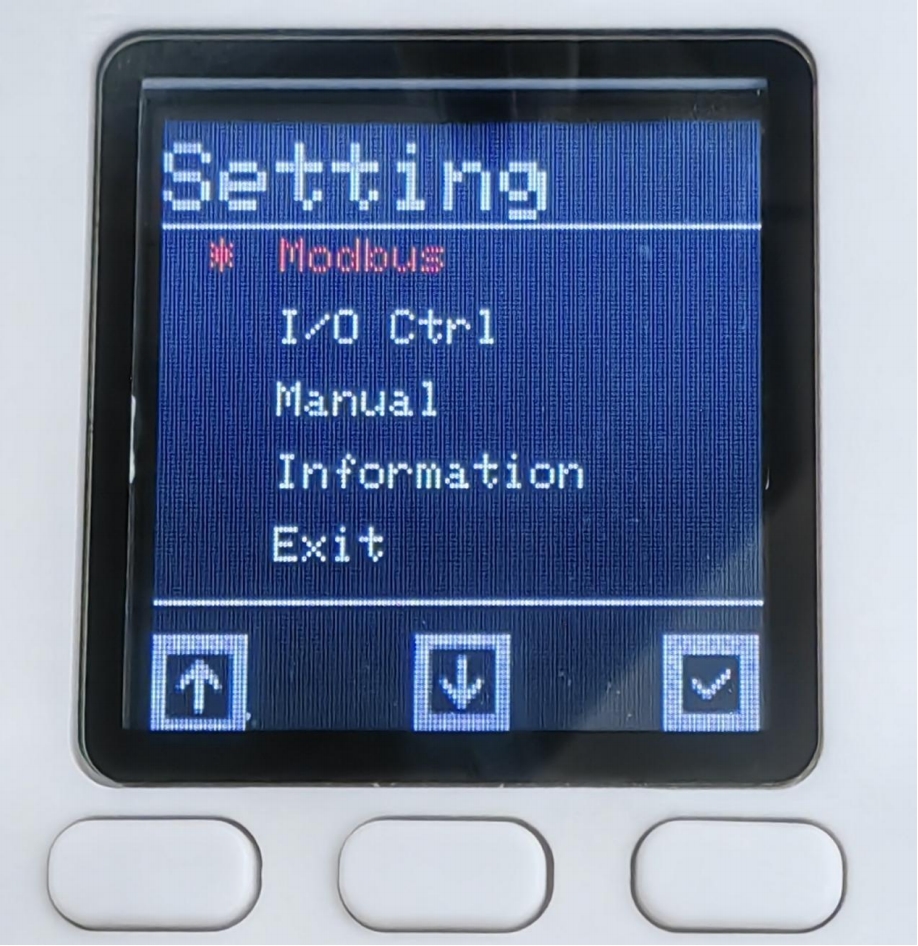
设置界面,通过按键可以上下移动和选择
波特率设置
在设置界面点击 Modbus 进入 Modbud Config 界面点击 Baudrate 进入界面,选择你想设置的波特率点击确认,当波特率傍边的原点颜色改变证明设置成功
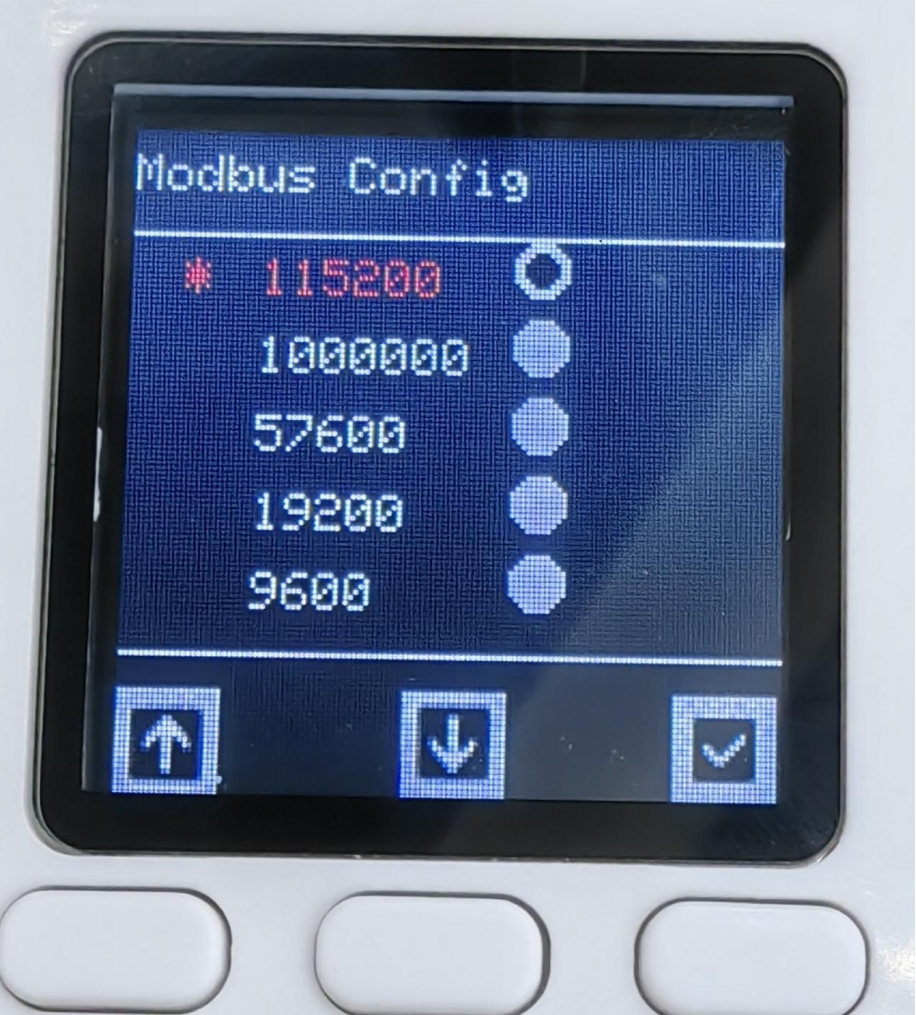
设置完后找到 Exit 点击即可退出当前界面
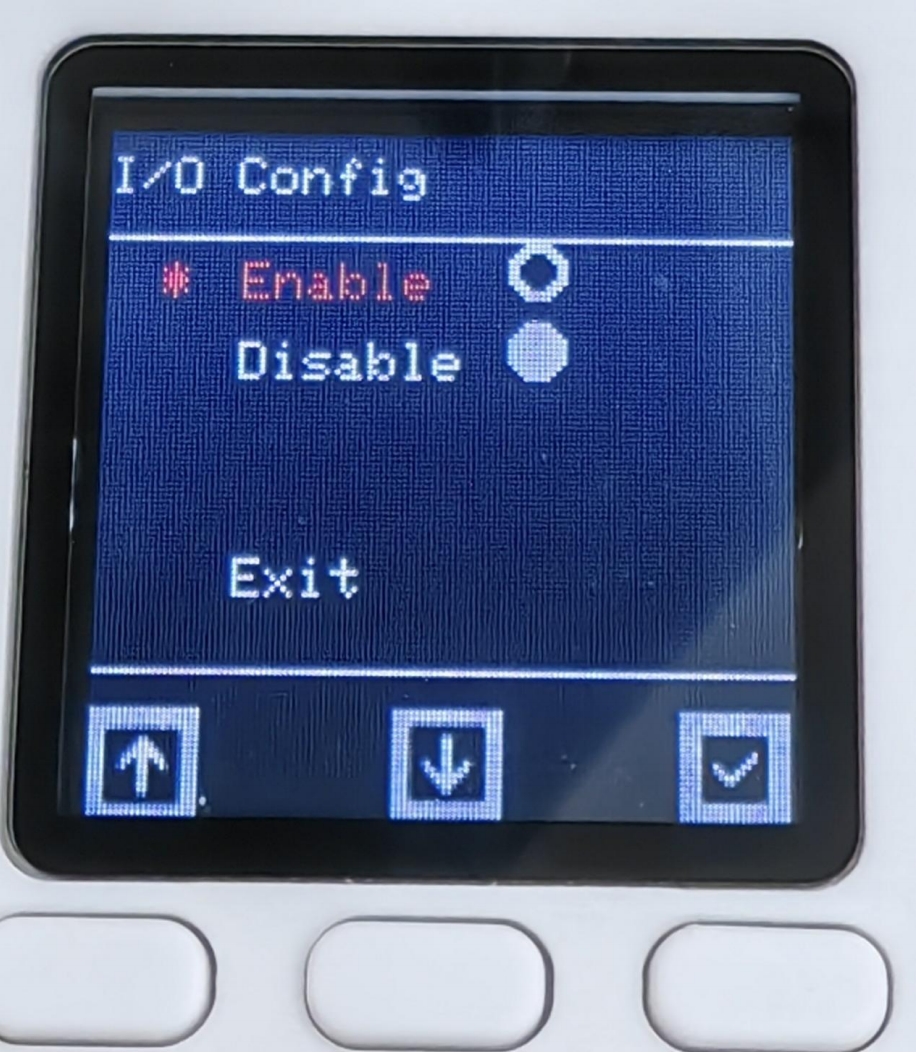
IO 使能设置
设置界面选择 I/O Ctrl,进入 I/O Config 界面,默认下 IO 是使能状态,如果不行,使用 IO 控制,可以选择 Disable 来关闭 IO 控制
Manual 界面
设置界面选择 Manual 进入 Manual Control 界面实现快速便捷的操控夹爪

选择 Quick Move 即可进入控制夹爪界面,如图 4.7,选择 Gripper Init 可进入 夹爪配置界面
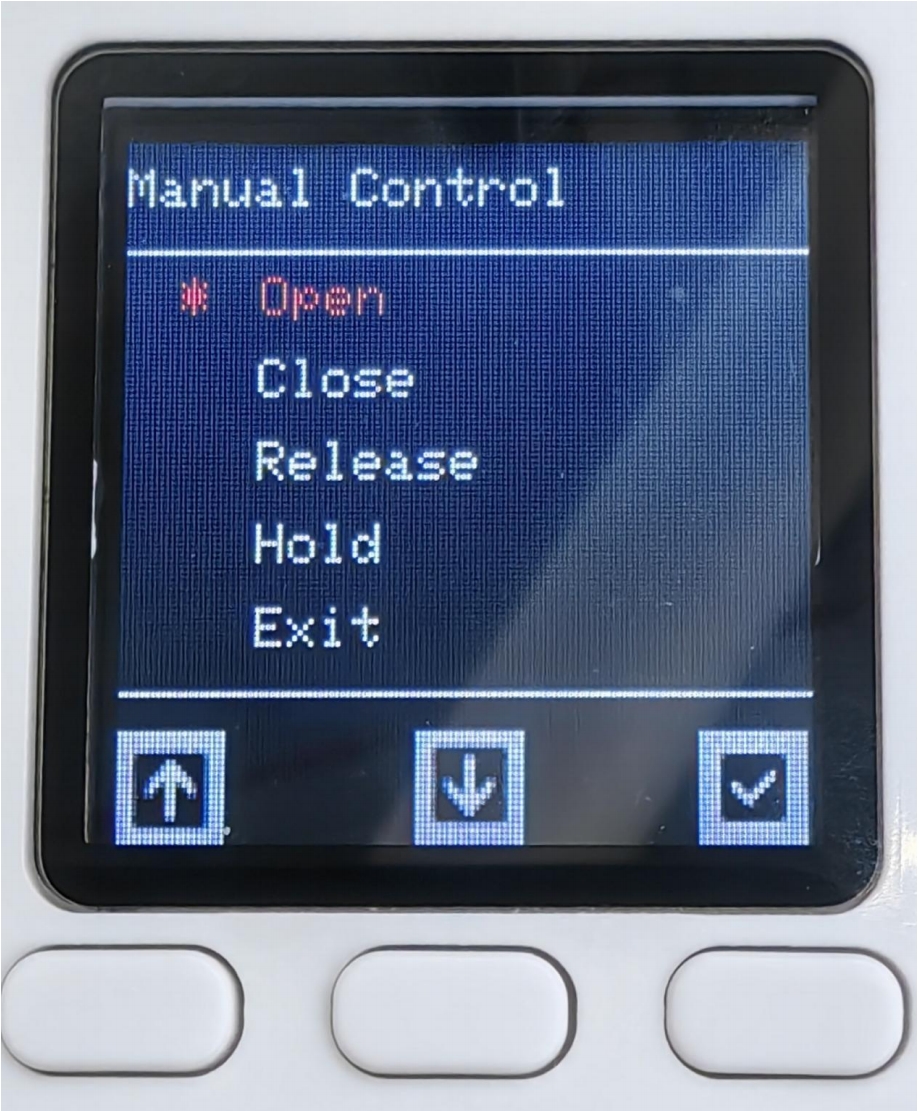
Open-设置夹爪张开,Close-设置夹爪闭合,Pelease-设置夹爪不使能,Hold-设置夹爪使能,Exit-退出当前界面
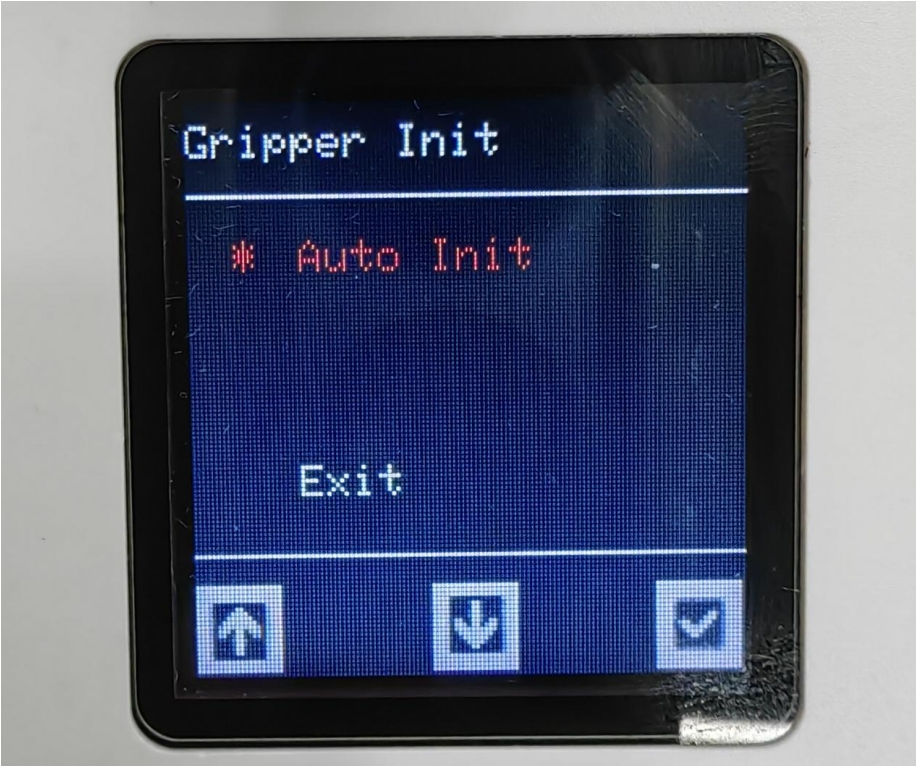
选择 Auto Init 可设置夹爪零位
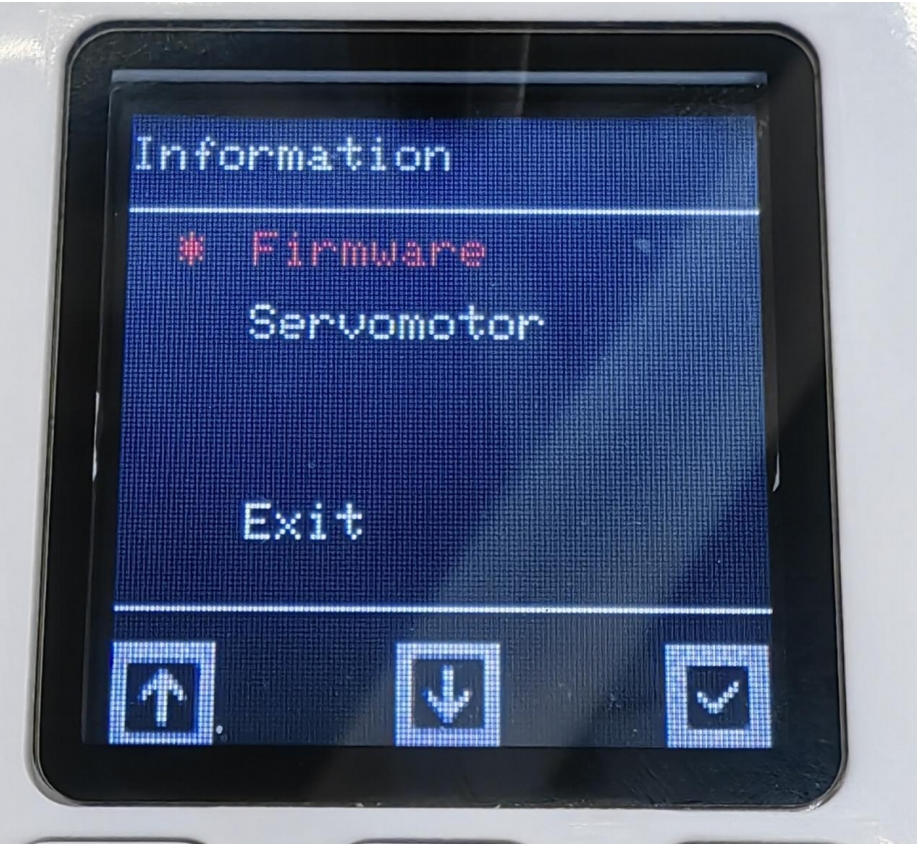
Information 界面
通过选择 Information 进入界面,我们可以看到 Firmware 和 Servomotor 两个选 项,前者是固件版本号,点击进去,可以查看当前固件主版本与次版本号。后者 是查看点击信息,点击进去可以看到 ID 与电机的主版本和次版本
点击 Firmware 查看固件版本与设备 ID 指令中的 ID

点击 Servomotor 查看电机版本与 ID,ID 无法修改

IO 控制
根据上述的引脚线序说明,找到 OUT1 OUT2 对应的线,输入 24V,当输入一高一低电平 时夹爪就会运动,相反给出一高一低电平时夹爪就会反向运动。屏幕主界面上可以观察到 IO 输入情况,当没有 IO 输入是 Input 就显现白色,当 IO 输入时就会显现黑点