ros 控制
USB-485模块接线:
连接夹爪端的 24V,GND, 485_A(T/R+,485+) , 485_B(T/R-,485-)共 4 根线,电源为24V直流稳压电源,将模块的 USB 插口插入到电脑的 USB 接口

485A 接入 485 转 USB 模块 A+;
485B 接入 485 转 USB 模块 B-;
24V 接入 24V 直流稳压电源正极;
GND 接入 24V 直流稳压电源负极
使用环境
Linux Ubuntu20.04 ROS Noetic,具体环境搭建内容请查看 ROS环境搭建
pro_gripper_ros 包安装
pro_gripper_ros 是 ElephantRobotics 推出的,适配旗下myGripper F100 力控夹爪的 ROS 包。
项目地址:http://github.com/elephantrobotics/pro_gripper_ros
注意: 在安装包之前,请保证拥有 ROS 工作空间,默认的 ROS 工作空间是 catkin_ws。
cd ~/catkin_ws/src # 进入工作区的src文件夹中
# 克隆github上的代码
git clone https://github.com/elephantrobotics/pro_gripper_ros.git
cd .. # 返回工作区
catkin_make # 构建工作区中的代码
cd ..
source devel/setup.bash # 添加环境变量
案例使用
打开终端命令行运行:
roslaunch pro_gripper_f100 force_gripper_slider.launch
打开 rviz 和一个滑块组件,您将看到如下界面:
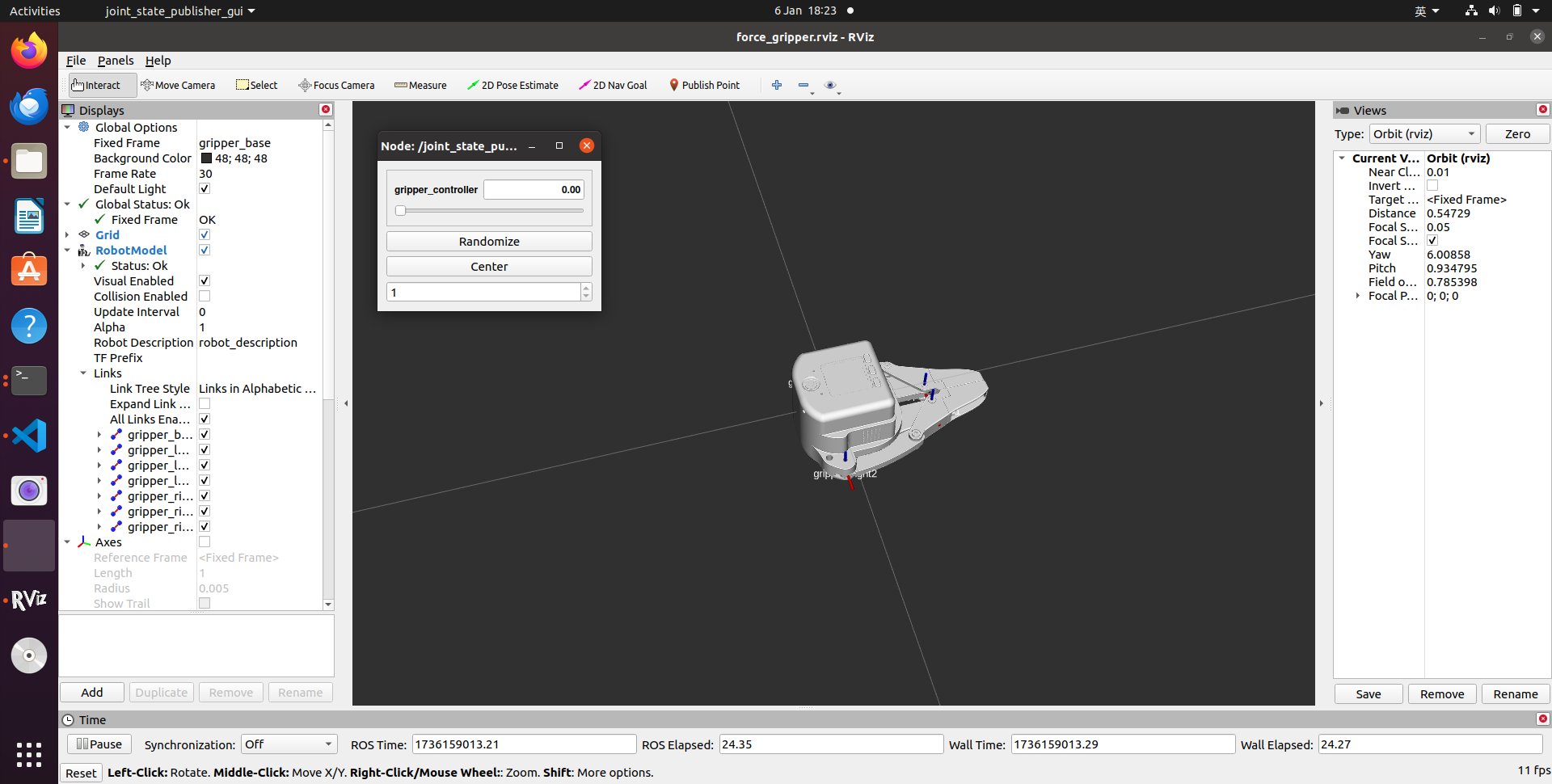
然后你就可以在 rviz 中 控制模型,通过拖动滑块使其打开或关闭。如果想让真实的夹爪随着模型打开或关闭,则需要打开另一个终端命令行并运行:
# 确保在运行之前授予串行端口权限, 默认串口为/dev/ttyACM0,波特率为115200, 可根据实际串口修改
rosrun pro_gripper_f100 force_gripper_slider.py _port:=/dev/ttyACM0 _baud:=115200