Gesture recognition case
1 Hardware installation
First manually align the end flange with the scale line

Then install the camera on the end flange according to the posture in the picture, and then connect the camera cable to the USB port of the main controller at the bottom

2 Software operation
Open a terminal and enter the command, press the Enter key on the keyboard to run
export CAM_TYPE=usb
Then enter the following command to start the camera recognition node
# Change to the home directory
cd ~
# Run the program again
ros2 launch hand_gesture_detection hand_gesture_detection.launch.py
The output log shows that the node runs successfully
[hand_gesture_detection-5] [C][32711][08-12][09:39:39:575][configuration.cpp:49][EasyDNN]EasyDNN version: 0.4.11
[hand_gesture_detection-5] [DNN] Runtime version = 1.9.7_(3.14.5 HBRT)
[hand_gesture_detection-5] [WARN] [1660268379.611419981] [hand gesture det node]: input_idx: 0, tensorType = 8, tensorLayout = 0
[hand_gesture_detection-5] [WARN] [1660268379.619313022] [hand gesture det node]: Create subscription with topic_name: /hobot_hand_lmk_detection
[hand_gesture_detection-5] [WARN] [1660268379.629207314] [hand gesture det node]: ai_msg_pub_topic_name: /hobot_hand_gesture_detection
[mono2d_body_detection-3] (MOTMethod.cpp:39): MOTMethod::Init config/iou2_euclid_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (IOU2.cpp:34): IOU2 Mot::Init config/iou2_euclid_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (MOTMethod.cpp:39): MOTMethod::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (IOU2.cpp:34): IOU2 Mot::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (MOTMethod.cpp:39): MOTMethod::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (IOU2.cpp:34): IOU2 Mot::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (MOTMethod.cpp:39): MOTMethod::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (IOU2.cpp:34): IOU2 Mot::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[hand_gesture_detection-5] [WARN] [1660268381.026173815] [hand_gesture_det]: Sub smart fps 31.16
[hand_gesture_detection-5] [WARN] [1660268381.206196565] [hand_gesture_det]: Pub smart fps 30.17
[hand_gesture_detection-5] [WARN] [1660268382.054034899] [hand_gesture_det]: Sub smart fps 30.19
[hand_gesture_detection-5] [WARN] [1660268382.234087357] [hand_gesture_det]: Pub smart fps 30.19
[hand_gesture_detection-5] [WARN] [1660268383.055988982] [hand_gesture_det]: Sub smart fps 29.97
[hand_gesture_detection-5] [WARN] [1660268383.235230316] [hand_gesture_det]: Pub smart fps 30.00
[hand_gesture_detection-5] [WARN] [1660268384.087152150] [hand_gesture_det]: Sub smart fps 30.10
[hand_gesture_detection-5] [WARN] [1660268384.256141566] [hand_gesture_det]: Pub smart fps 30.39
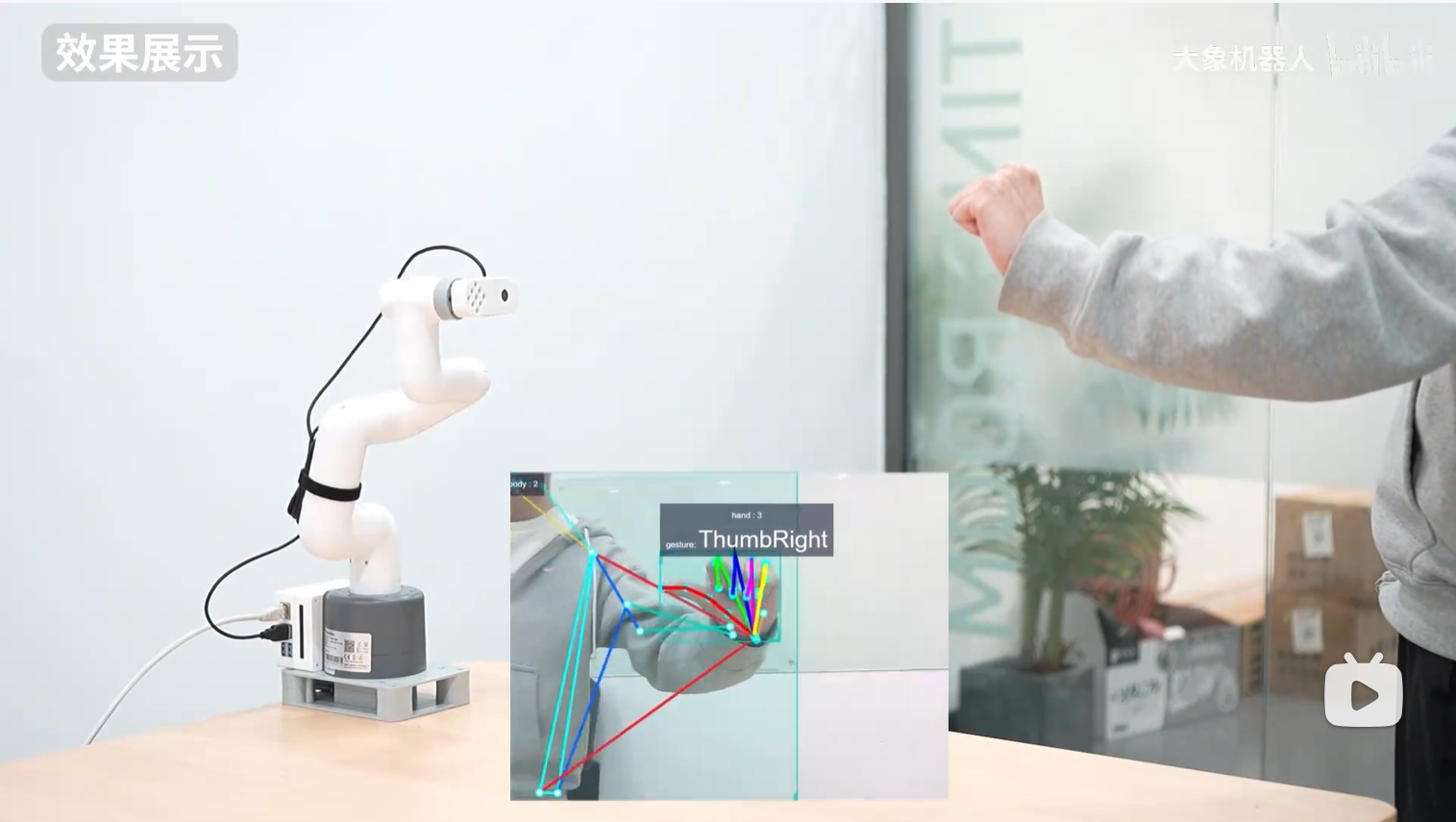
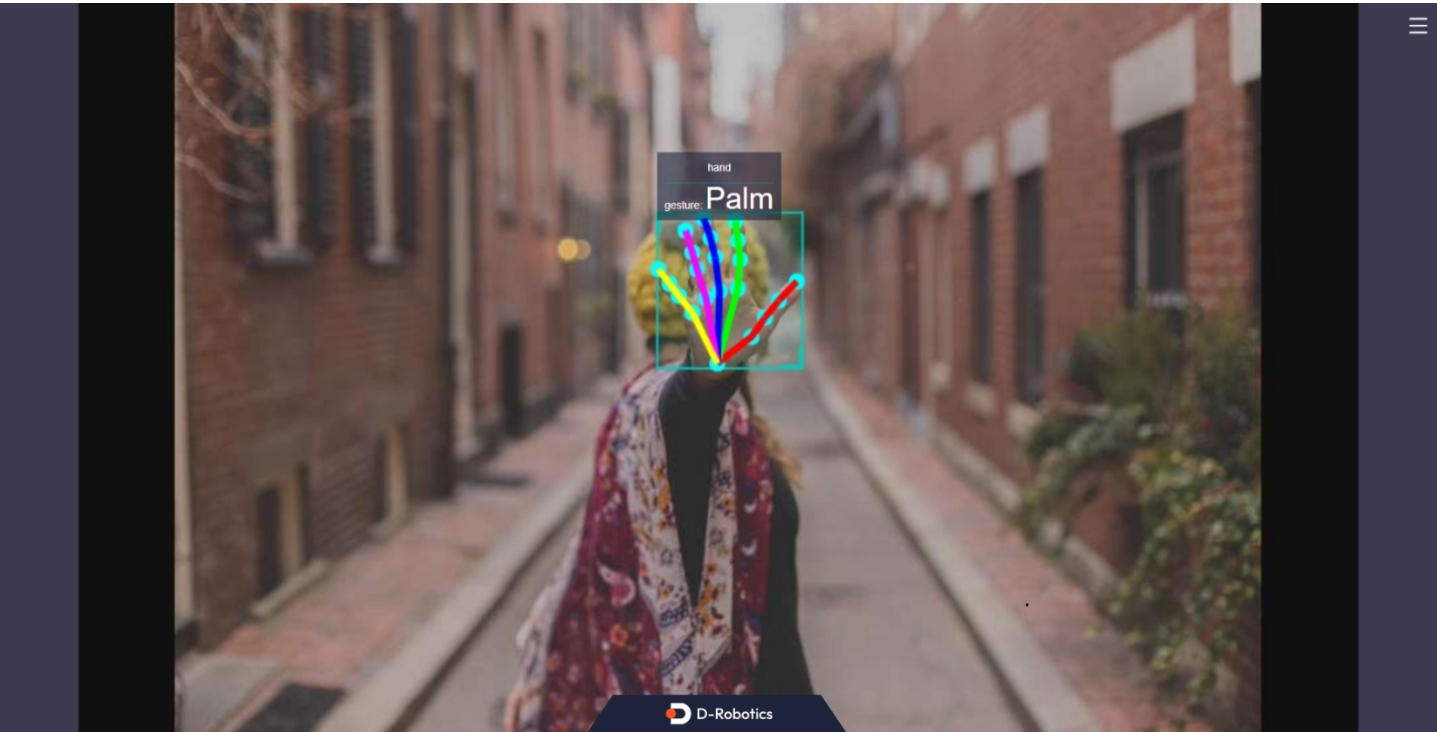
Enter http://IP:8000 in the browser on the PC to view the image and algorithm rendering effects (IP is the IP address of RDK):
| Gesture | Description | Value |
|---|---|---|
| ThumbUp | Thumbs up | 2 |
| Victory | "V" gesture | 3 |
| Mute | "Shh" gesture | 4 |
| Palm | Palm | 5 |
| Okay | OK gesture | 11 |
| ThumbLeft | Thumbs left | 12 |
| ThumbRight | Thumbs right | 13 |
| Awesome | 666 gesture | 14 |
Example Program
import rclpy
from rclpy.node import Node
from ai_msgs.msg import PerceptionTargets
from sensor_msgs.msg import CompressedImage
from pymycobot import MyCobot280RDKX5,utils
import time
import cv2
import numpy as np
class MinimalSubscriber(Node):
def __init__(self):
self.mc=MyCobot280RDKX5("/dev/ttyS1",1000000)
self.mc.set_fresh_mode(0)
self.mc.sync_send_angles([0,0,0,0,0,46.3],100)
print("ok")
super().__init__('minimal_subscriber')
self.cam_subscription = self.create_subscription(
CompressedImage,
'/image',
self.cam_listener_callback,
10)
self.subscription = self.create_subscription(
PerceptionTargets,
'hobot_hand_gesture_detection',
self.listener_callback,
10)
self.subscription # prevent unused variable warning
self.value=None
self.img=None
self.count=0
# self.lock = threading.Lock()
def cam_listener_callback(self, msg):
np_arr = np.frombuffer(msg.data, np.uint8)
cv_image = cv2.imdecode(np_arr, cv2.IMREAD_COLOR)
self.img=cv_image
def listener_callback(self, msg):
for target in msg.targets:
for attribute in target.attributes:
self.get_logger().info(f'Value: "{attribute.value}"')
# self.get_logger().info(f'confidence: "{attribute.confidence}"')
tmp=int(attribute.value)
self.count+=1
#print (f"count={self.count}")
if self.count==50 and tmp==self.value:
if self.value==5:
self.mc.send_angles([0,0,0,0,0,46.3],100)
time.sleep(1)
self.mc.send_angles([0, -15.99, -49.57, 67.93, 7.99, 46.3],100)
time.sleep(1)
# self.mc.sync_send_angles([0, 30.58, -49.57, 12.48, 21.44, 0],100)
# time.sleep(1)
self.mc.send_angles([0,0,0,0,0,46.3],100)
time.sleep(1)
# self.value=None
elif self.value==3:
if self.img is not None:
cv2.imshow("Compressed Image", self.img)
cv2.waitKey(2000)
cv2.destroyAllWindows()
# self.value=None
elif self.value==11:
for i in range(1):
self.mc.send_angles([0, 0, 0, -70, 0, 46.3],100)
time.sleep(1)
self.mc.send_angles([0, 0, 0, 0, 0, 46.3],100)
time.sleep(1)
# self.value=None
elif self.value==12:
self.mc.send_angles([0, -15.99, -49.57, 67.93, 7.99, 46.3],100)
time.sleep(1)
self.mc.send_angles([-30.58, -45.61, -0.96, 47.37, 38.84, 46.3],100)
time.sleep(1)
elif self.value==13:
self.mc.send_angles([0, -15.99, -49.57, 67.93, 7.99, 46.3],100)
time.sleep(1)
self.mc.send_angles([34.36, -6.24, -63.1, 69.96, -26.27, 46.3],100)
time.sleep(1)
elif self.value==2:
self.mc.send_angles([0, -15.99, -49.57, 67.93, 7.99, 46.3],100)
time.sleep(1)
self.mc.send_angles([0.79, -13.35, -28.38, 37.7, 7.47, 46.3],100)
time.sleep(1)
elif self.value==4:
self.mc.send_angles([0.7, 48.33, -113.55, 61.43, 0.0, 46.3],100)
time.sleep(1)
elif self.value==14:
self.mc.send_angles([0.7, 48.33, -113.55, 61.43, 0.0, 46.3],100)
time.sleep(1)
for i in range(3):
self.mc.send_angles([0.7, 48.33, -113.55, 61.43, 0.0, 46.3],100)
self.mc.send_angles([0.7, 33.92, -77.34, 38.4, 0.08, 46.3],100)
self.mc.send_angles([0.7, 33.92, -77.34, 38.4, 0.08, 46.3],100)
time.sleep(2)
self.count=0
self.value=tmp
if self.count>50:
self.count=0
def main(args=None):
rclpy.init(args=args)
minimal_subscriber = MinimalSubscriber()
rclpy.spin(minimal_subscriber)
minimal_subscriber.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
Effect display