硬件介绍
1 设备清单
| 设备图片 | 设备名称 | 设备数量 |
|---|---|---|
 |
ultraArm P340 | 2 |
 |
USB 摄像头 2D | 2 |
 |
相机支架 | 2 |
 |
传送带 | 1 |
 |
传送带控制器 | 1 |
 |
垂直吸泵 | 2 |
 |
快换舵机 | 2 |
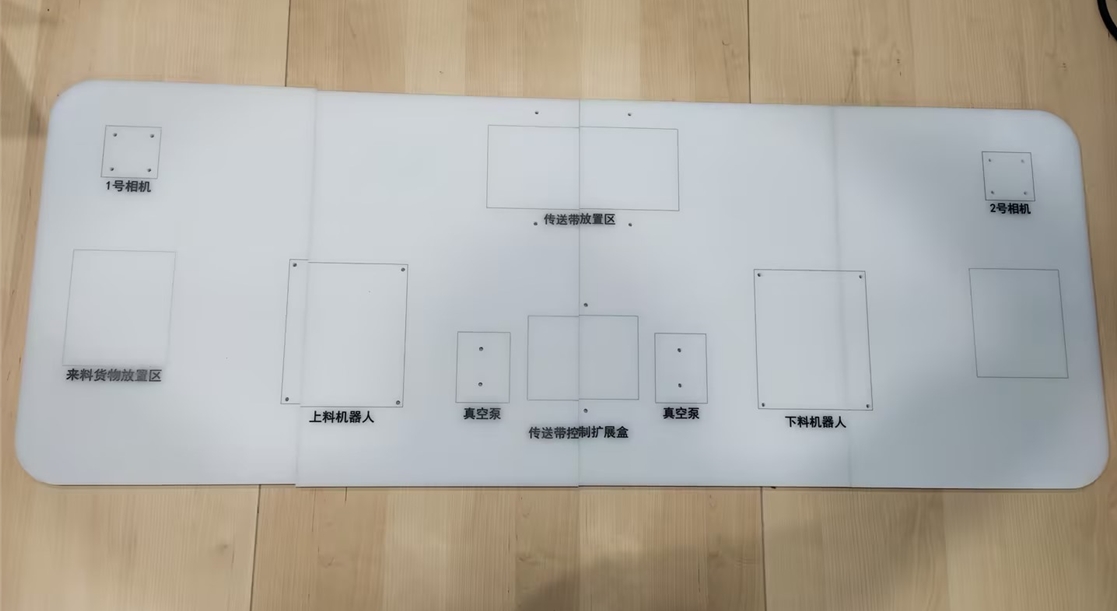 |
套装底板 | 1 |
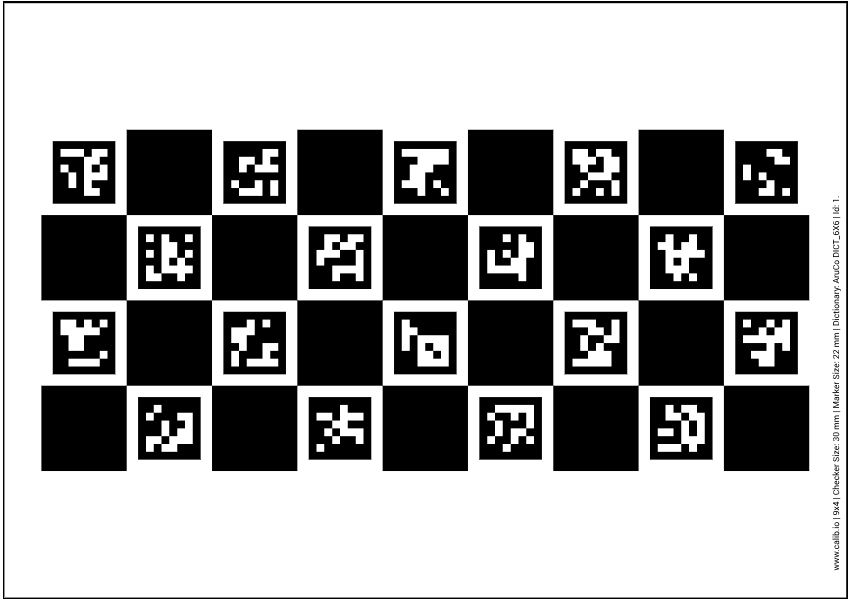 |
二维码贴纸(套) | 1 |
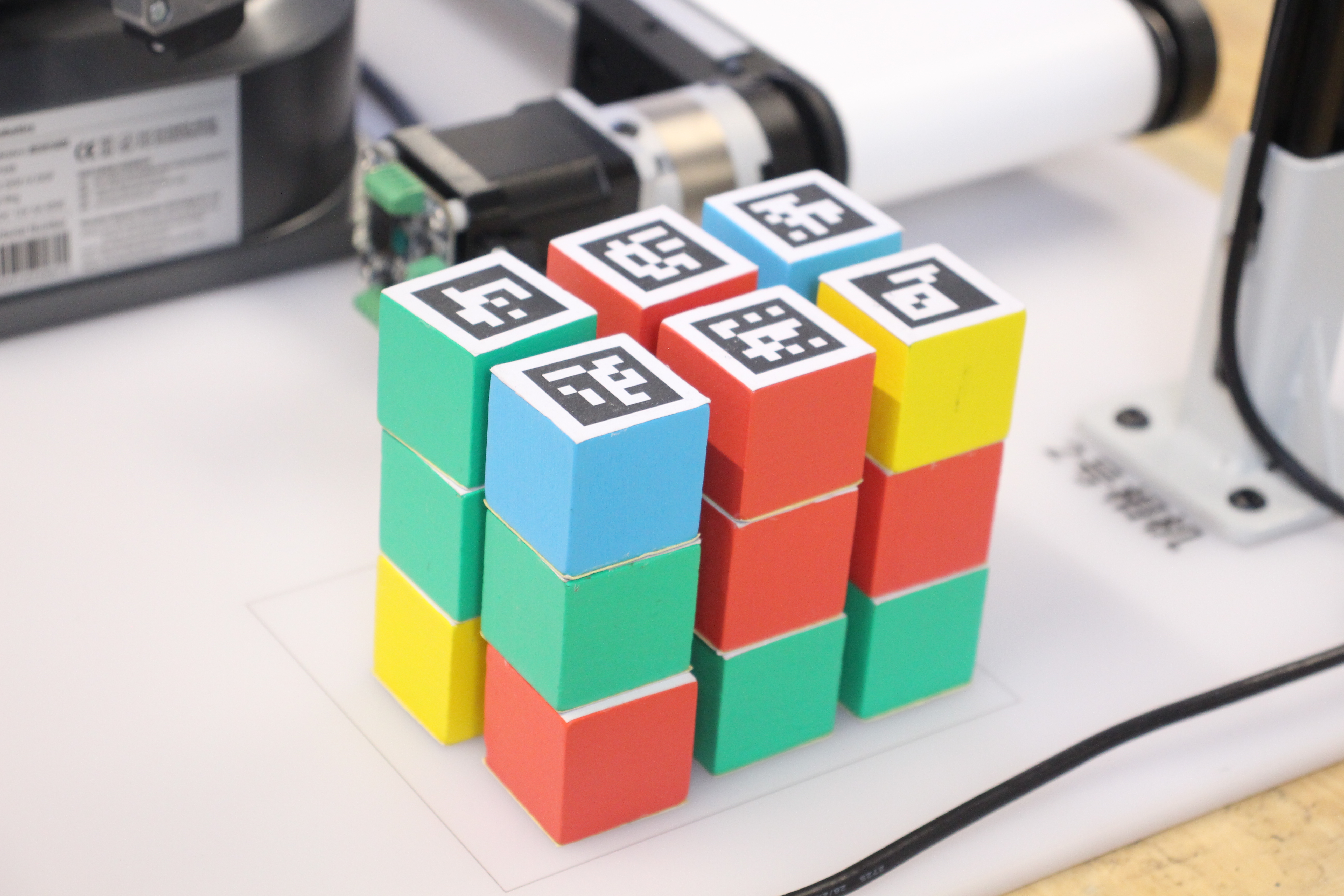 |
识别物块3*3cm | 20 |
 |
USB扩展坞 | 1 |
2 设备参数
2.1 UltraArm P340机械臂参数
| 项目 | 参数 |
|---|---|
| 型号 | ultraArm P340 |
| 自由度 | 3DOF / 4DOF |
| 有效负载 | 650g |
| 工作半径 | 340mm |
| 重复定位精度 | ±0.1mm |
| 重量 | 2.9kg |
| 使用寿命 | 5000小时,支持7X24小时 |
| 输入电源 | 12V 5A |
| 关节范围 | J1:-150° ~ +170°;J2:-20° ~ 90°;J3:-5° ~ 75° |
| 噪音 | 60 dB |
| 最大末端速度 | 100mm/s |
| 电源适配器 | 100-240VAC 50-60Hz |
| 底座接口 | 激光雕刻接口;自适应夹爪接口;吸泵接口;烧录开关 |
| TCP末端速度 | 100 mm/s |
| 安装方式 | 桌面水平安装 |
| 动力模块 | 高性能步进电机 |
| 编程方式 | Elephant Luban,图形化编程myBlockly,Python,ROS1/ROS2 |
| 工作温度 | 0°~45° |
| 工作环境湿度 | 5%-80% |
2.2 摄像头参数
| 项目 | 参数 |
|---|---|
| 摄像头名称 | USB无畸变摄像头 |
| 图像像素 | 2M 1080p |
| 支持图像格式 | 650g |
| 像元尺寸 | 3.0umx3.0um |
| 最高帧率 | MJPG:1920 1080@30fps;YUV:1920 1080@30fps |
| USB 协议 | USB2.0 HS/FS |
| 支持的分辨率 | 1280X720,640X480,320X240 |
| 电源供应 | 12V 5A |
| 支持的分辨率 | 1280X720,640X480,320X240 |
| 视场角度 | 110°无畸变 |
| 支持的系统 | Windows XP/7/8/10/VISTA/SEVEN/MAC LINUX(include uvc)/树莓派/Android 4.2+ |
2.3 传送带参数
| 项目 | 参数 |
|---|---|
| 电机类型 | 步进电机 |
| 控制器 | Mega 2560 控制板 |
| 电源供应 | DC24V |
| 传送带长度 | 800mm |
| 最大运行速度 | 0.5m/s |
| 传送带宽度 | 100mm |
| 传送带高度 | 60mm |
| 承载能力 | 500g |