硬件安装
1 物料检查
参考上一小节的物料清单,查看是否物料齐全

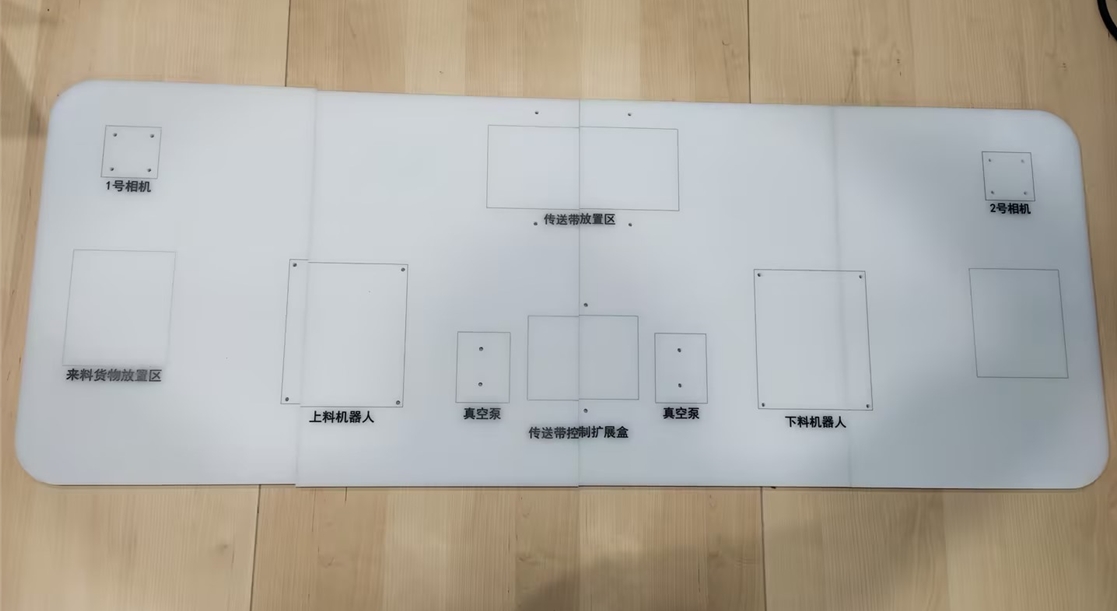
2 底盘拼接
将底板按照下图参考拼接起来
3 相机模块组装
先将组装相机支架底座的物料准备好
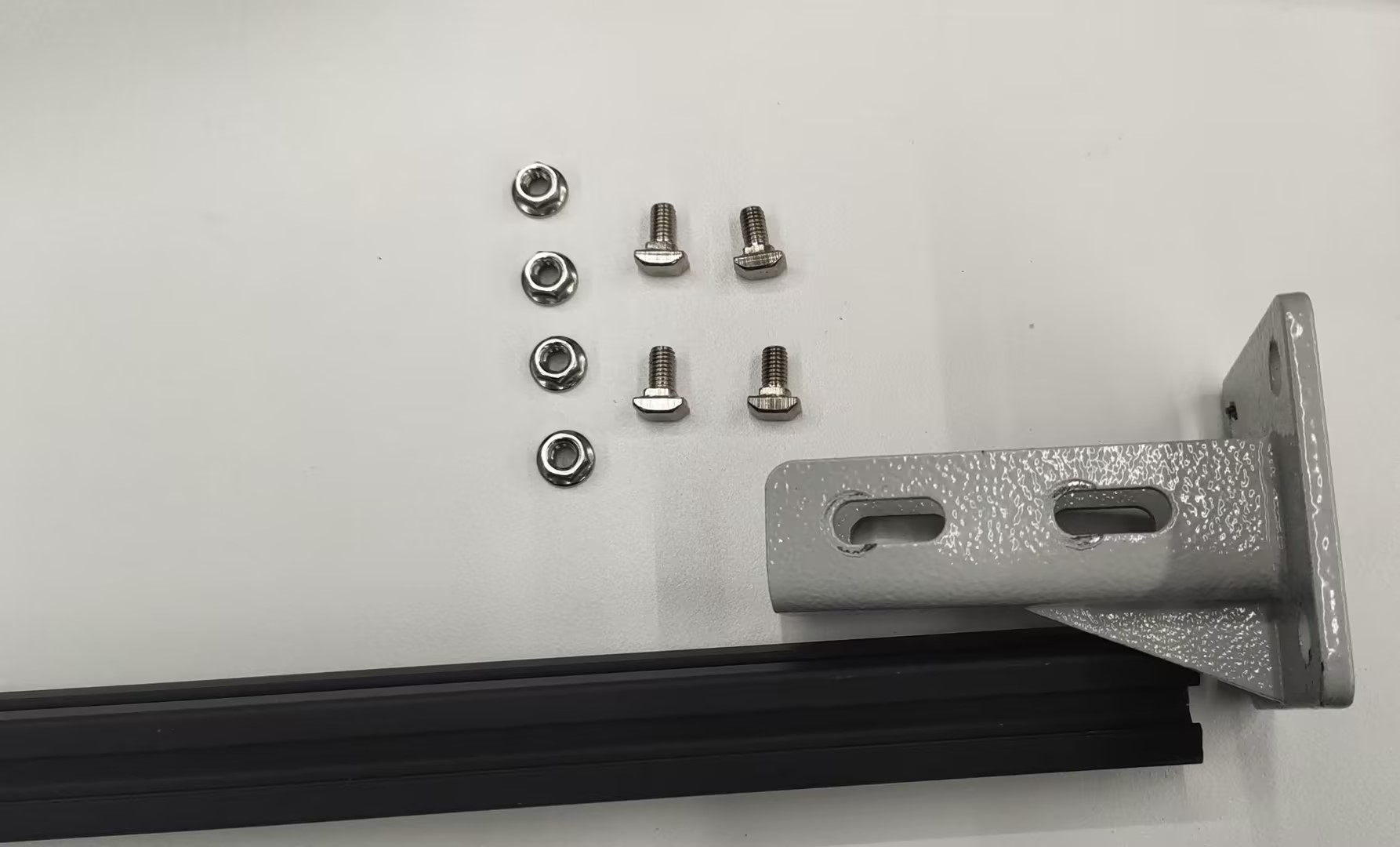
将型材放进底座中
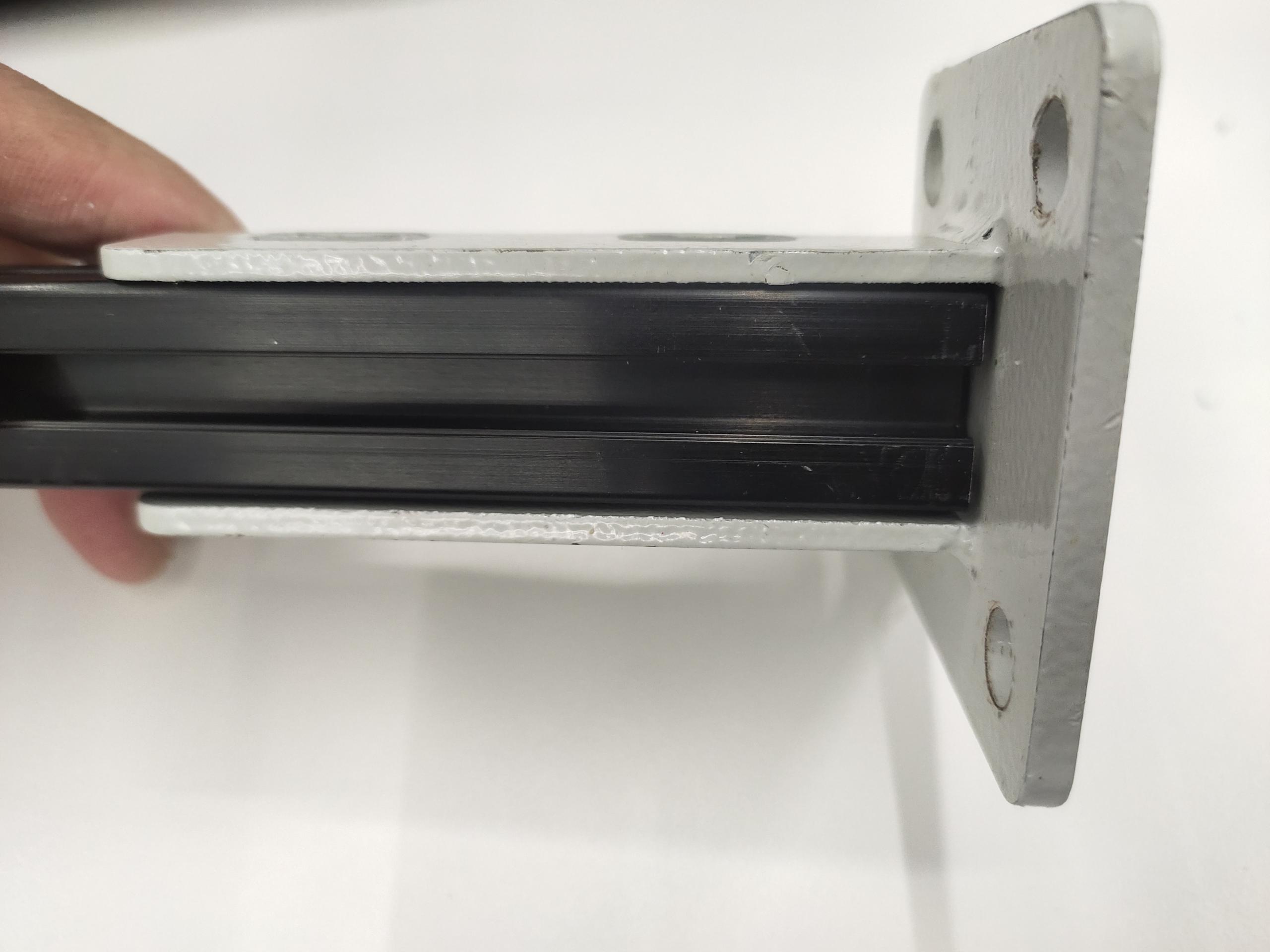
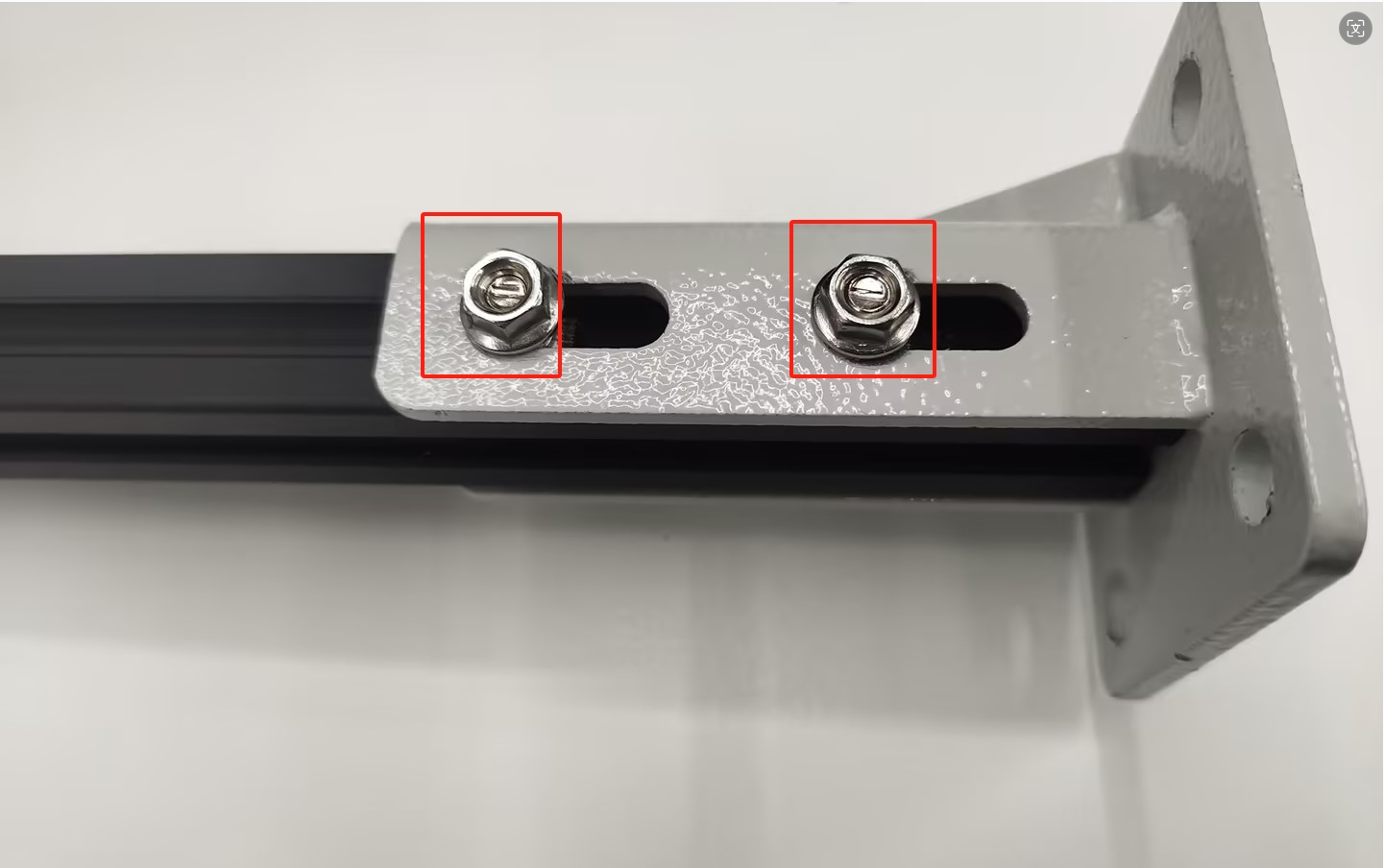
将螺丝放进型材里面
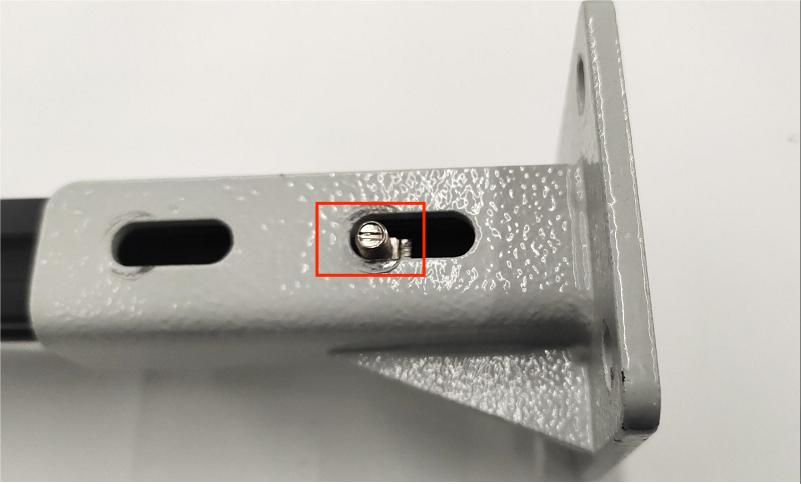
再用螺母固定
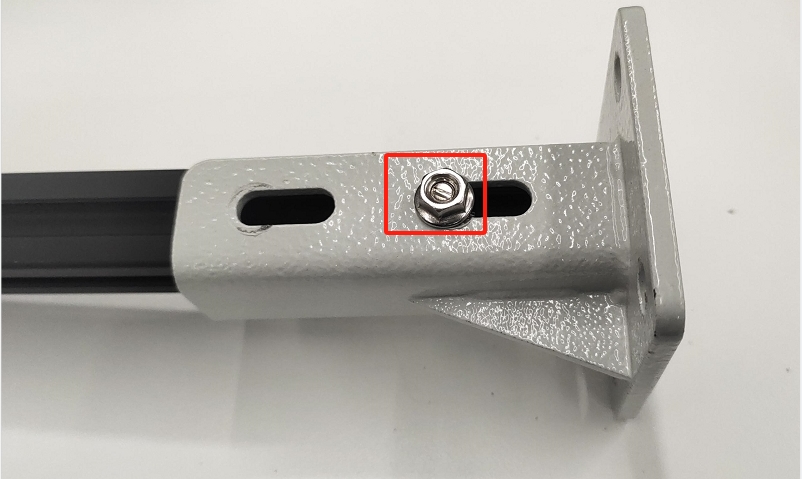
底座两侧都需要固定
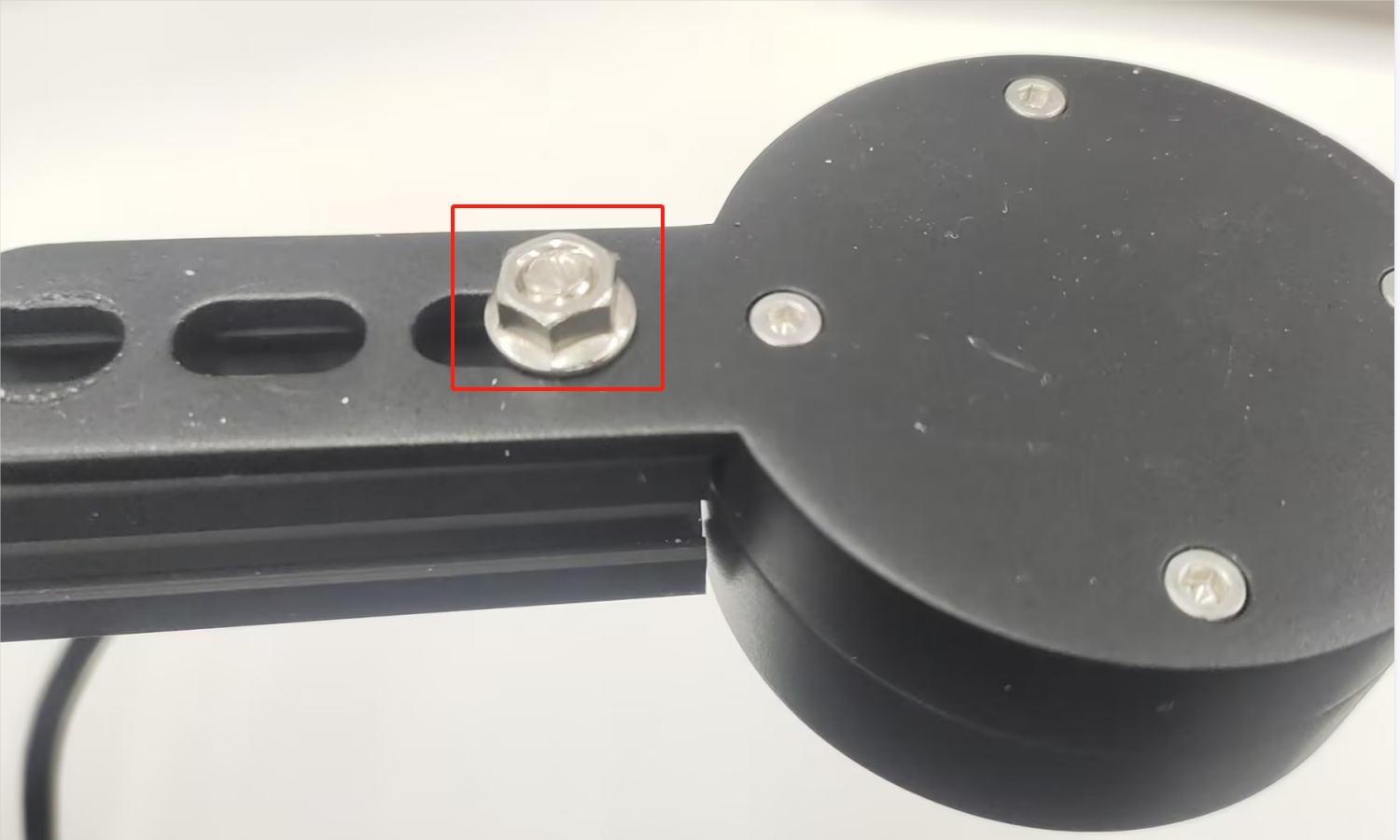
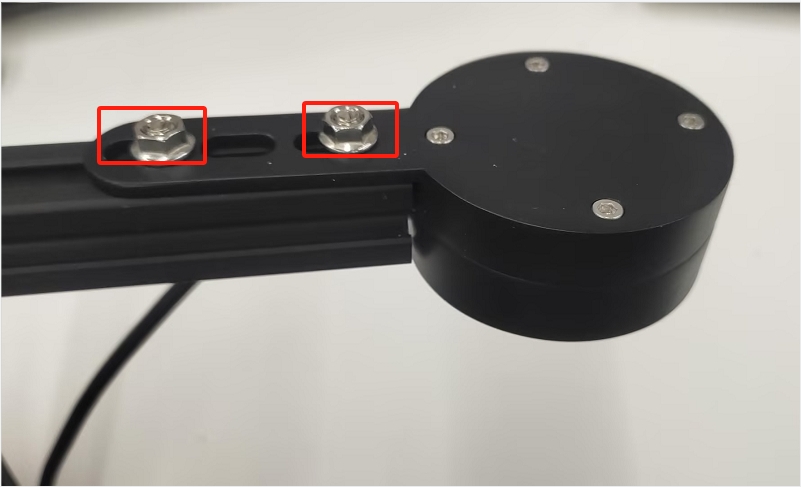
先将船帽螺母放进型材上
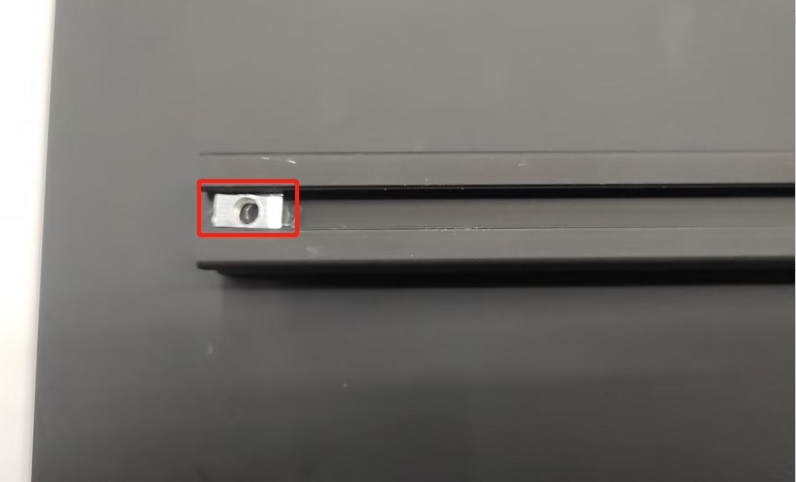
再用角码将两根型材连接起来
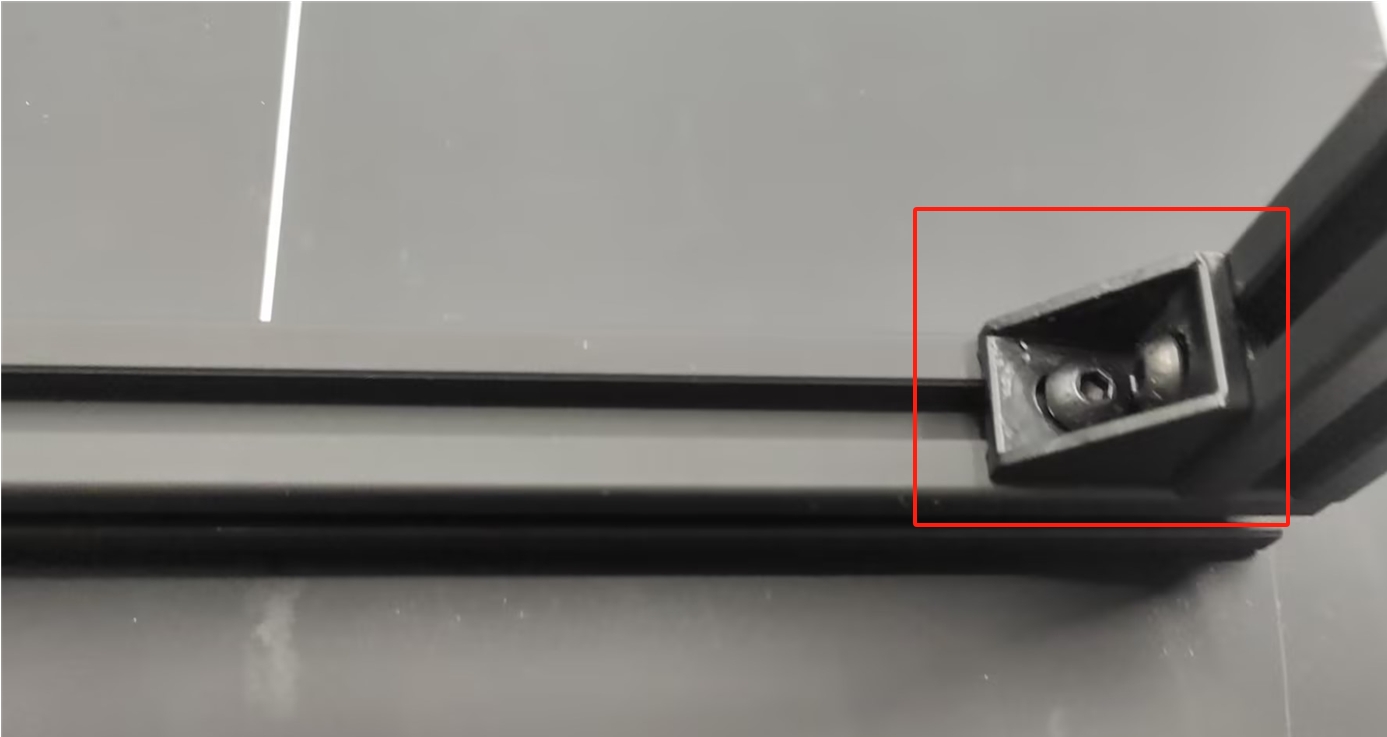
两个相机支架都是相同的组装方法
4 传送带模块安装
先将传送带放到底板上,然后将主控盒固定在底版上
将传送带的电机线接到传送带上
给传送带主控接上24V电源
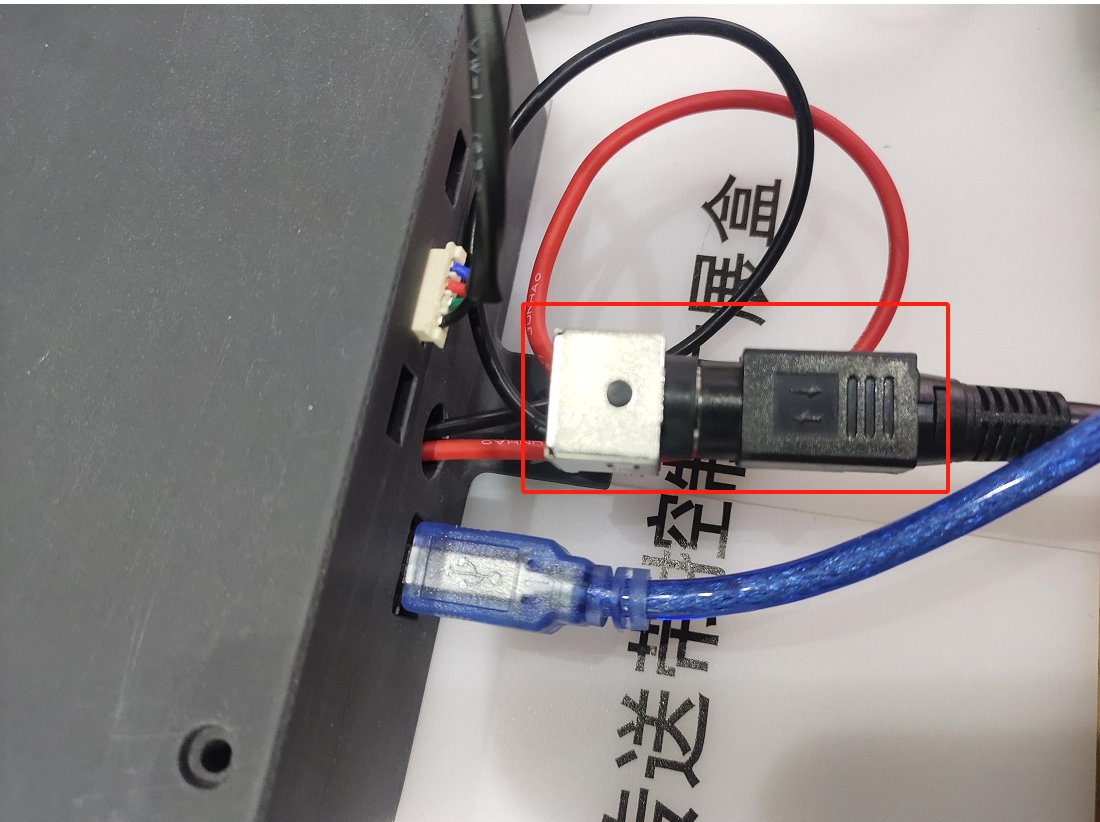
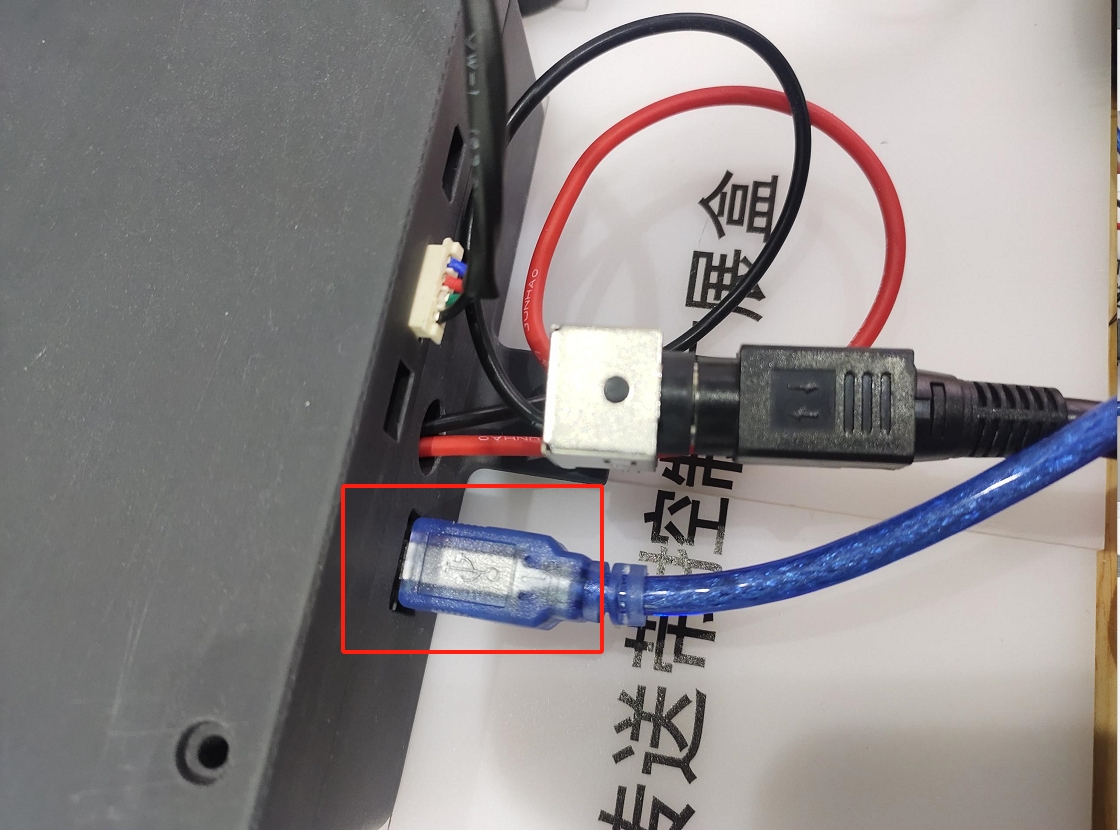
将数据线接到传送带主控上
最后用两侧的传送带支架将传送带固定在底板上

5 机械臂安装
根据底板上的文字,将两台机械臂放到安装位置上
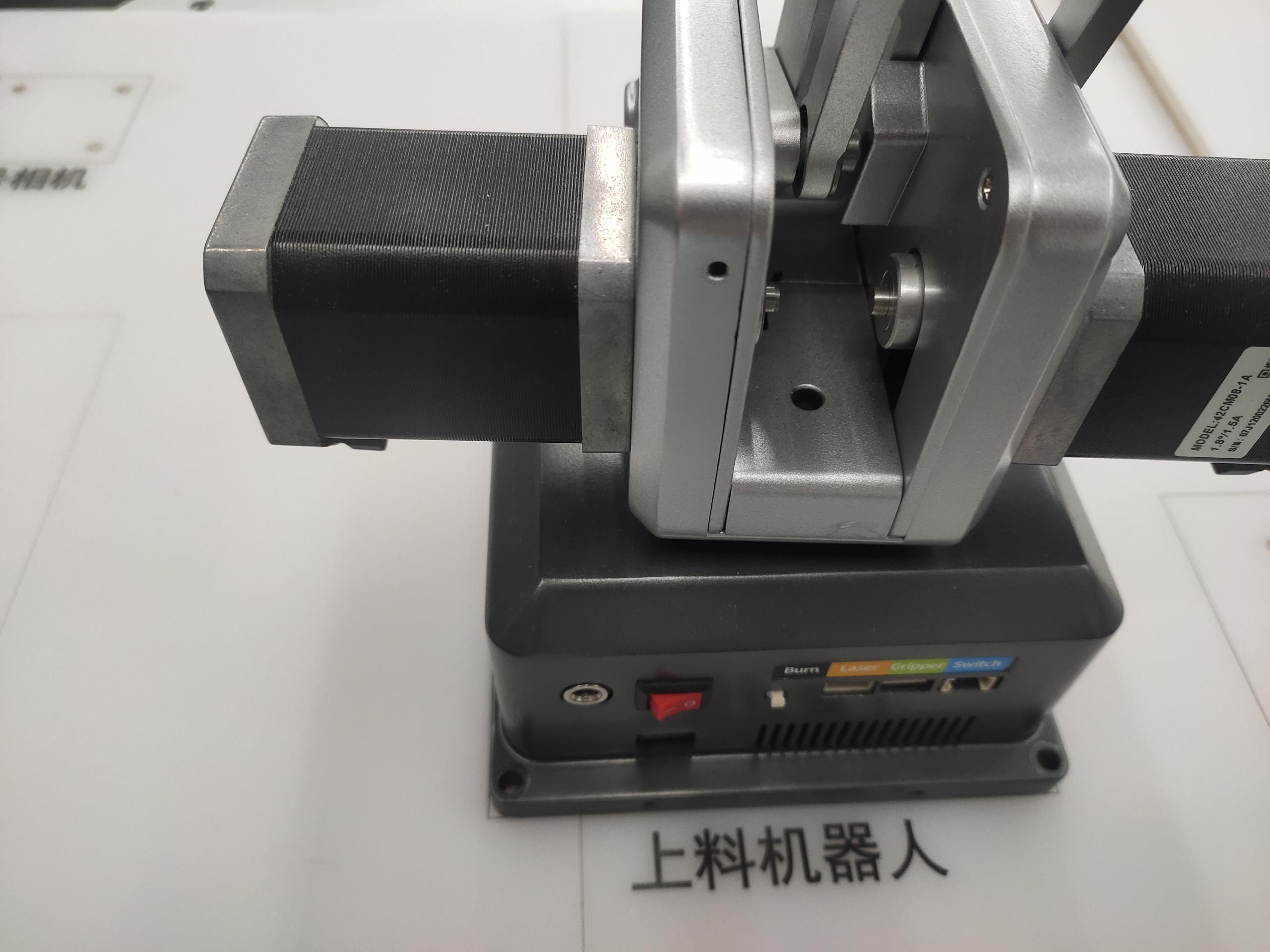

将机械臂固定在底板上,每个机械臂需要用四颗内六角螺丝固定

接上电源线和数据线

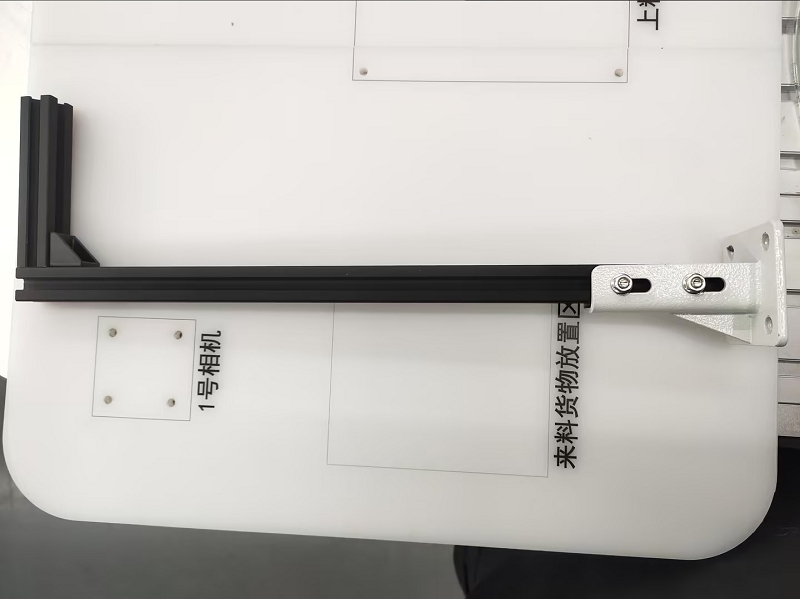
6 相机安装
先将相机准备好

将螺丝放进型材里面
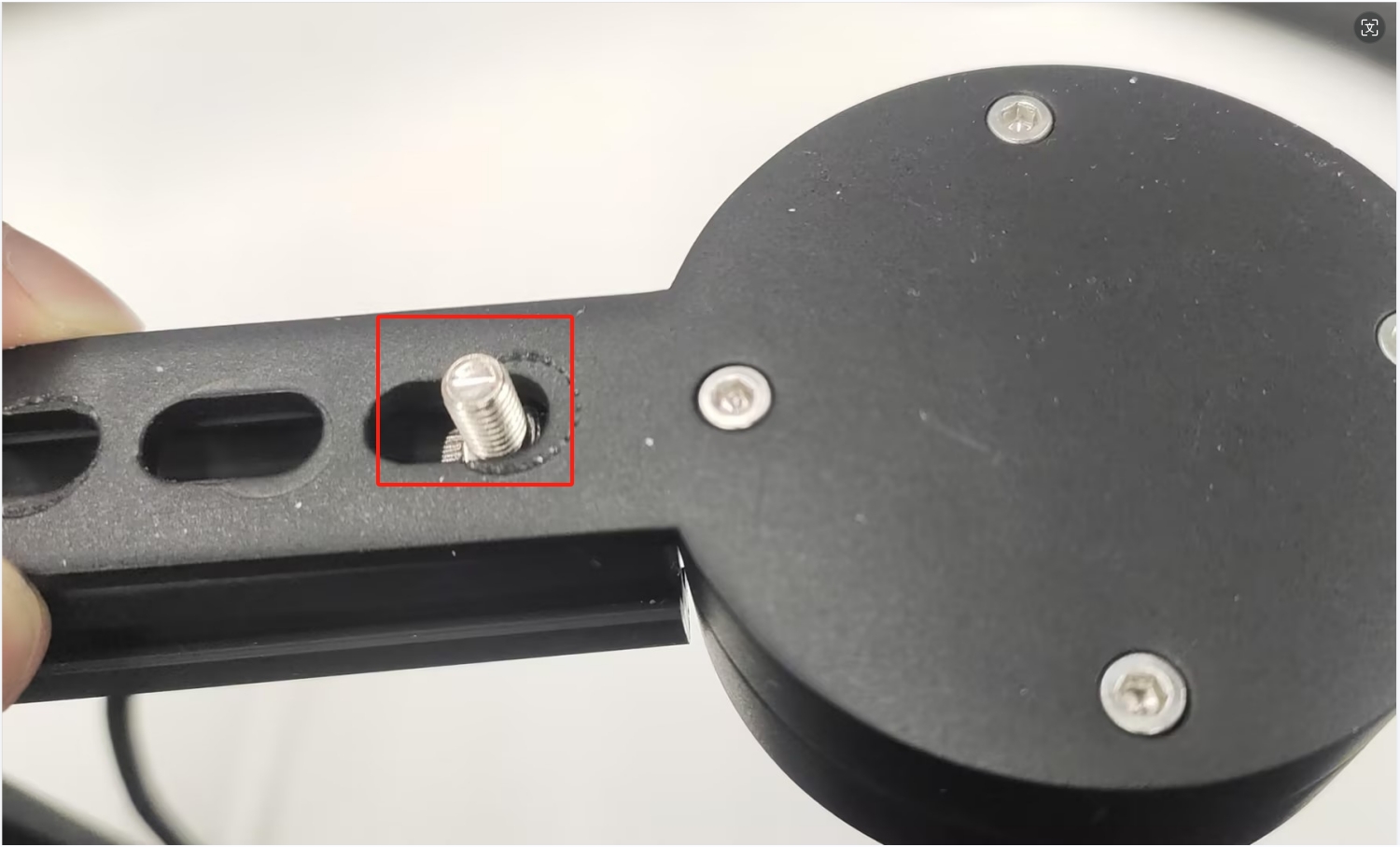 然后用螺母固定
然后用螺母固定
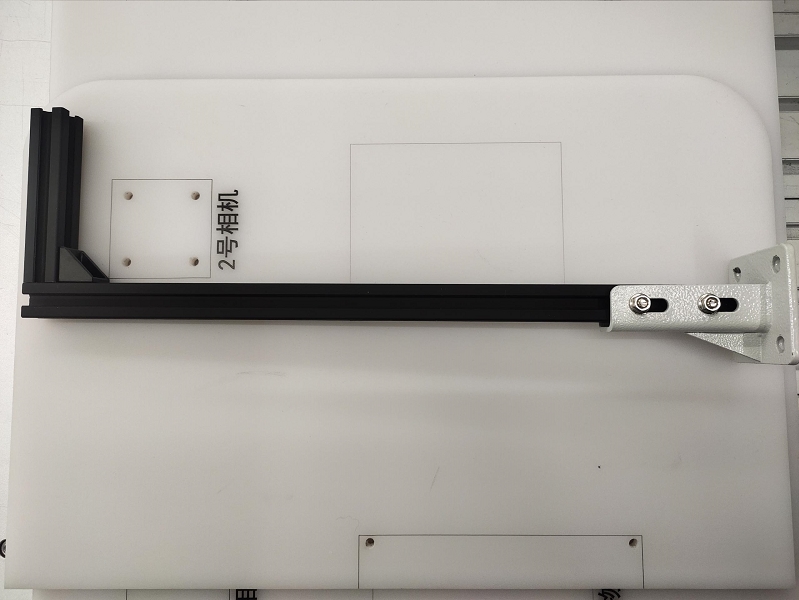
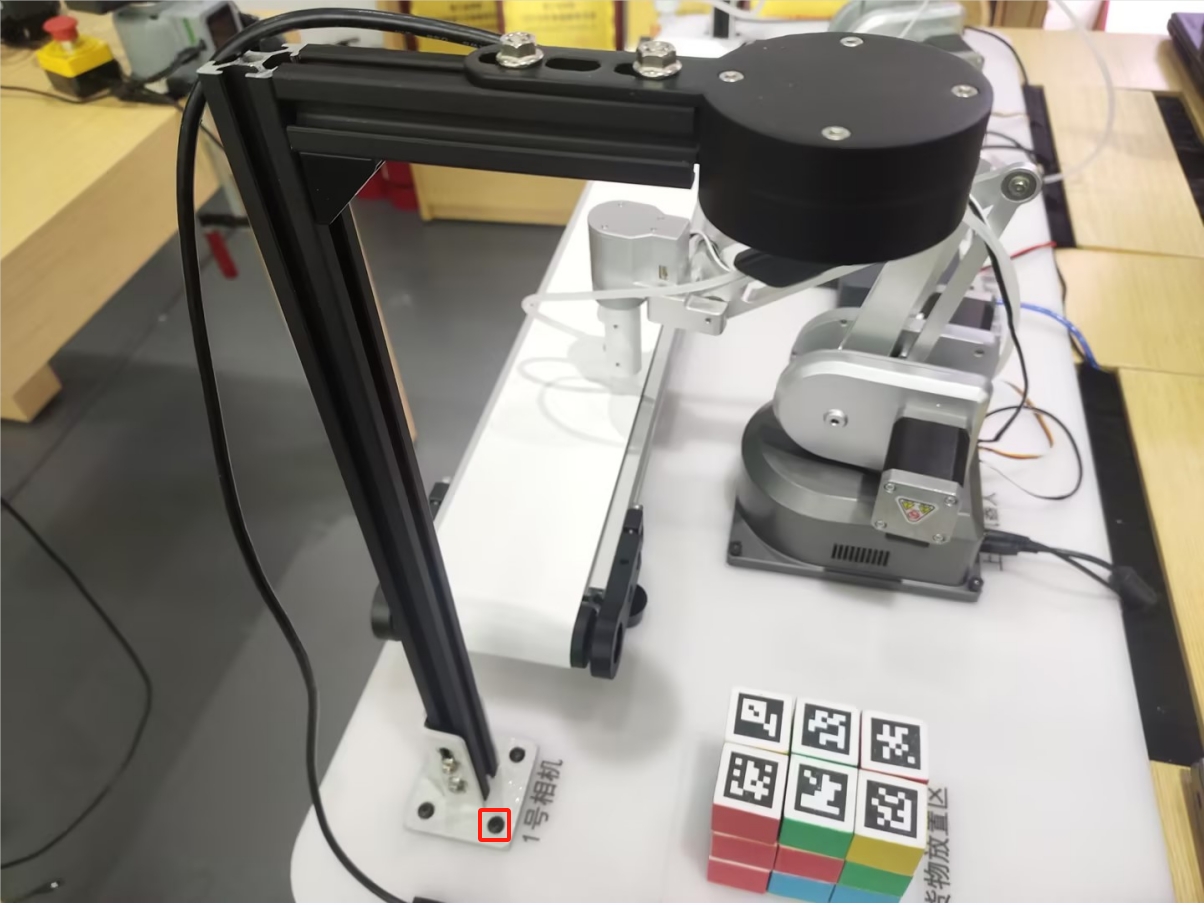
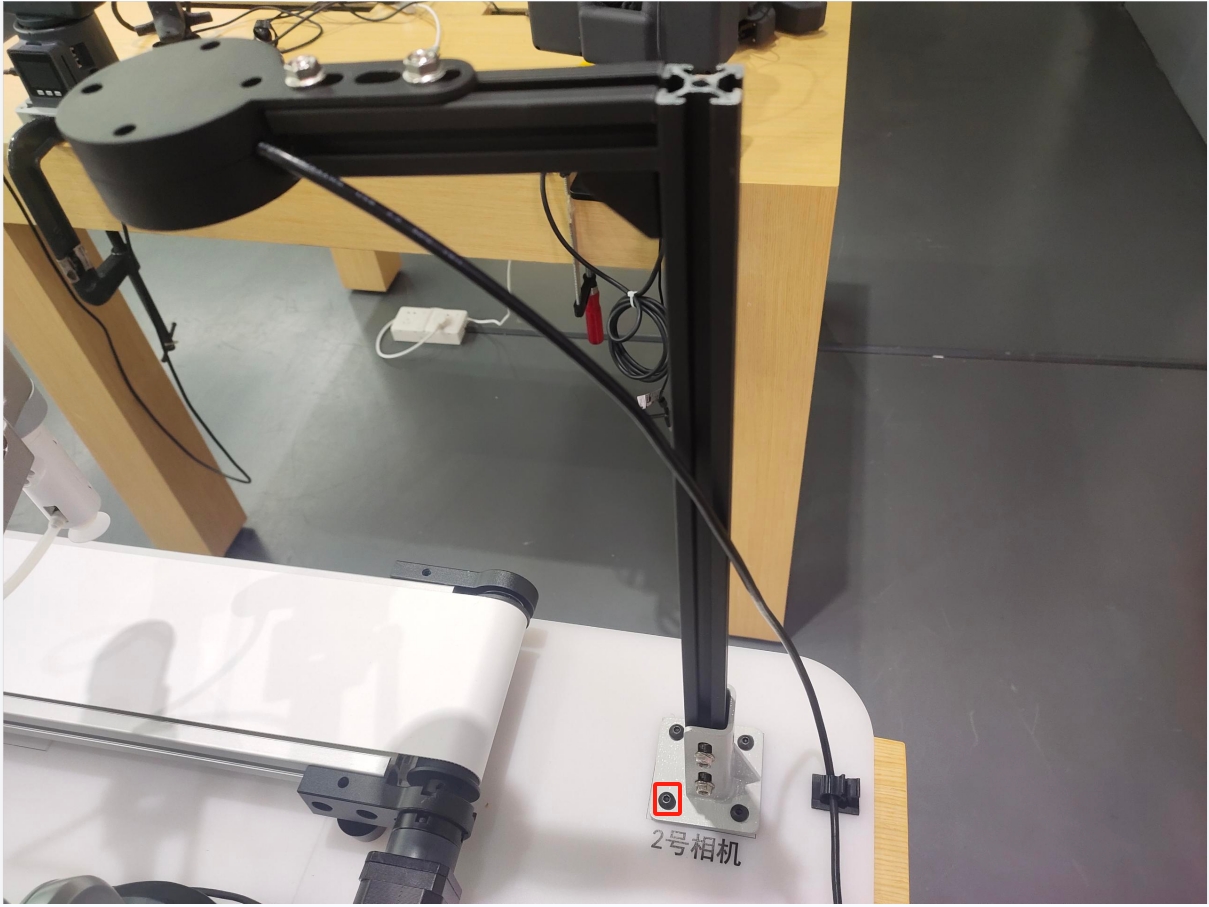
需要用两个螺丝固定,安装时注意相机与型材尽量保持水平垂直,否则会影响相机抓取精度
将1号相机安装到底板上
将2号相机安装到底板上
7 末端工具安装
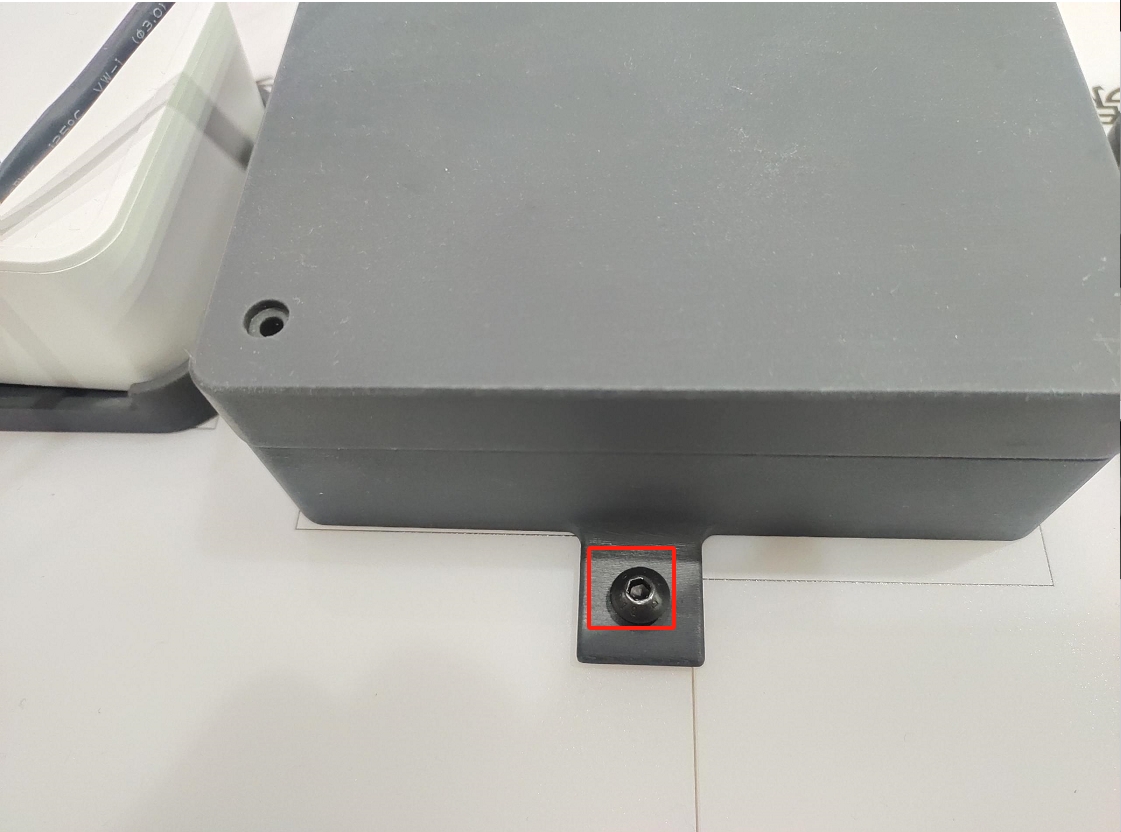
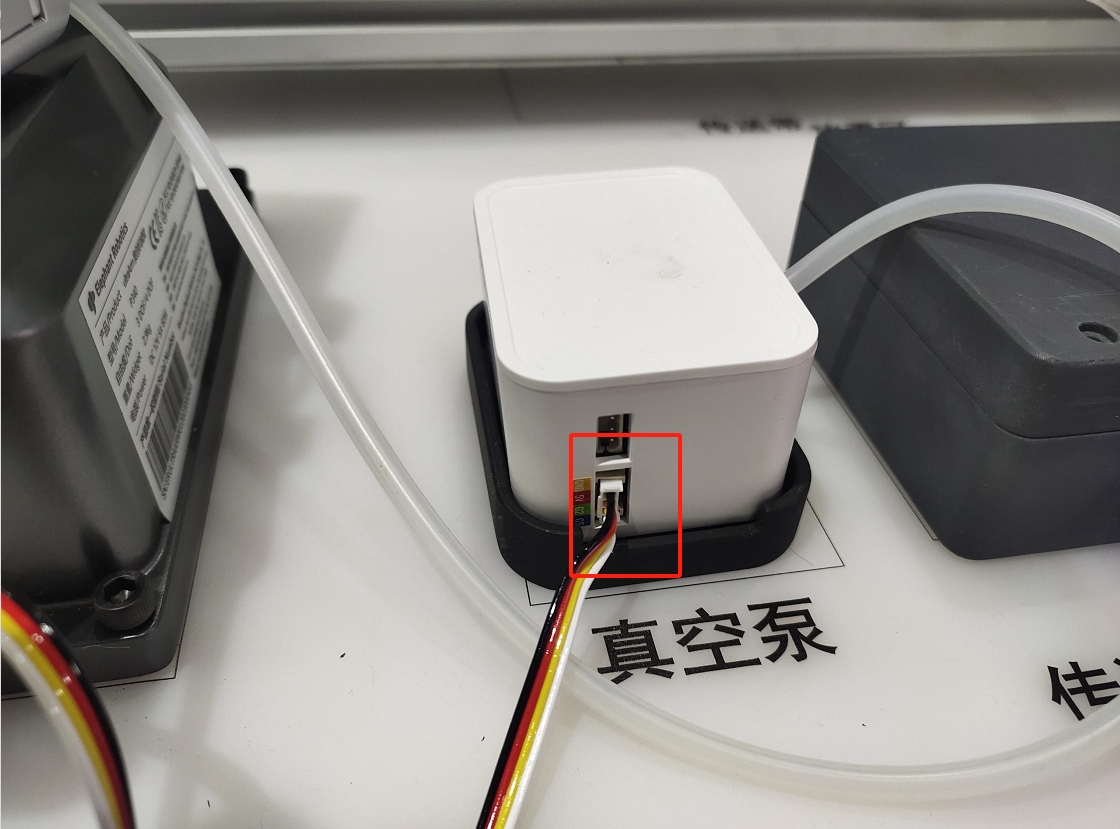
7.1 气泵盒固定架安装
将气泵盒固定架固定在底板上

将气泵盒固定在气泵盒固定架上

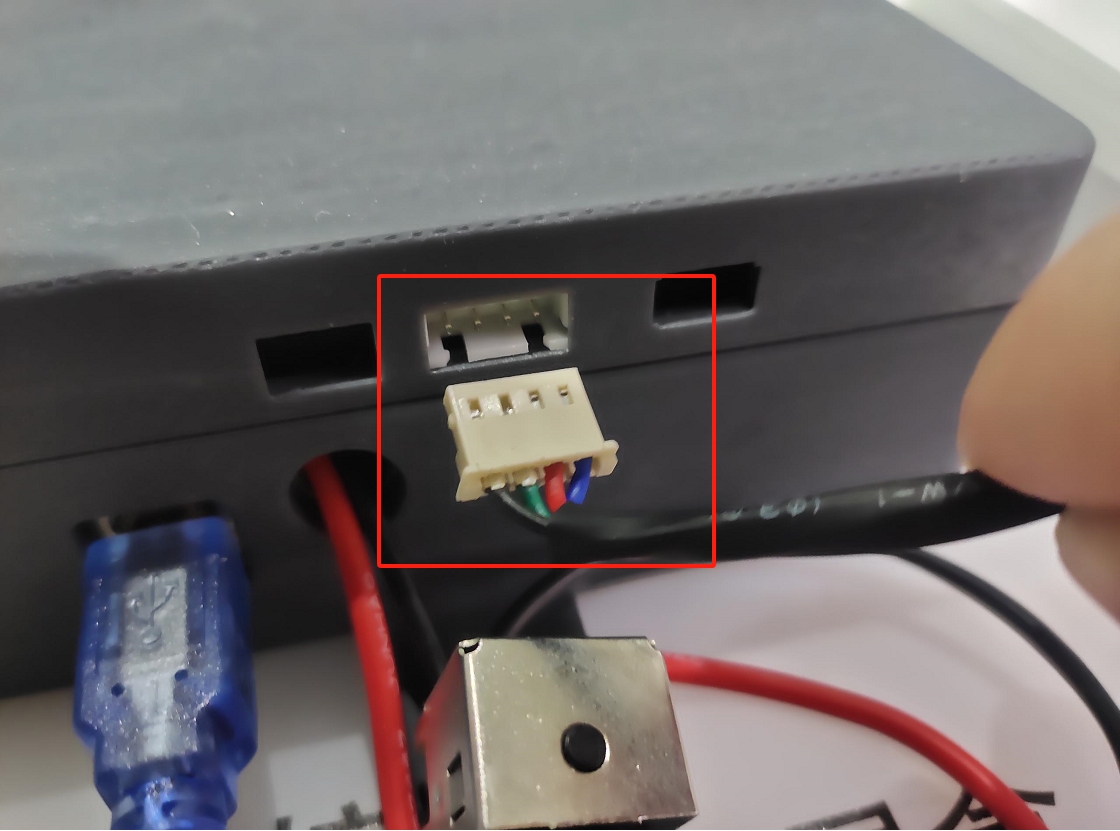
将4pin线接到吸泵盒上
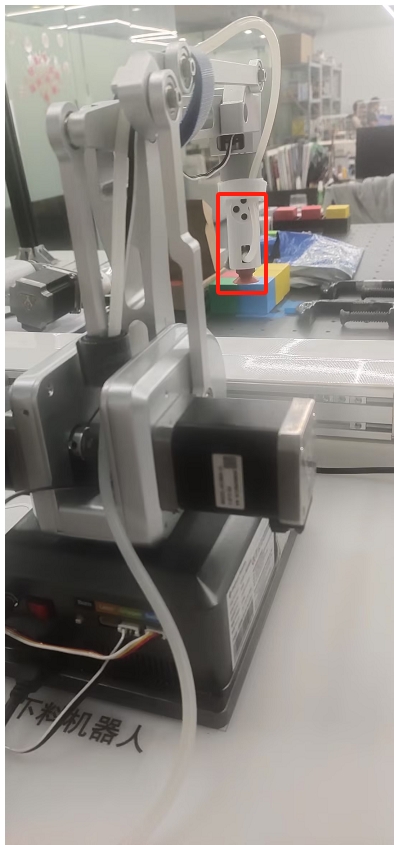
7.2 舵机与末端吸泵拼接
将舵机线插入舵机的任意一侧

将乐高连接件插入末端吸盘连接处

将舵机和末端吸盘拼接起来

将舵机线和吸泵盒的线接到机械臂末端

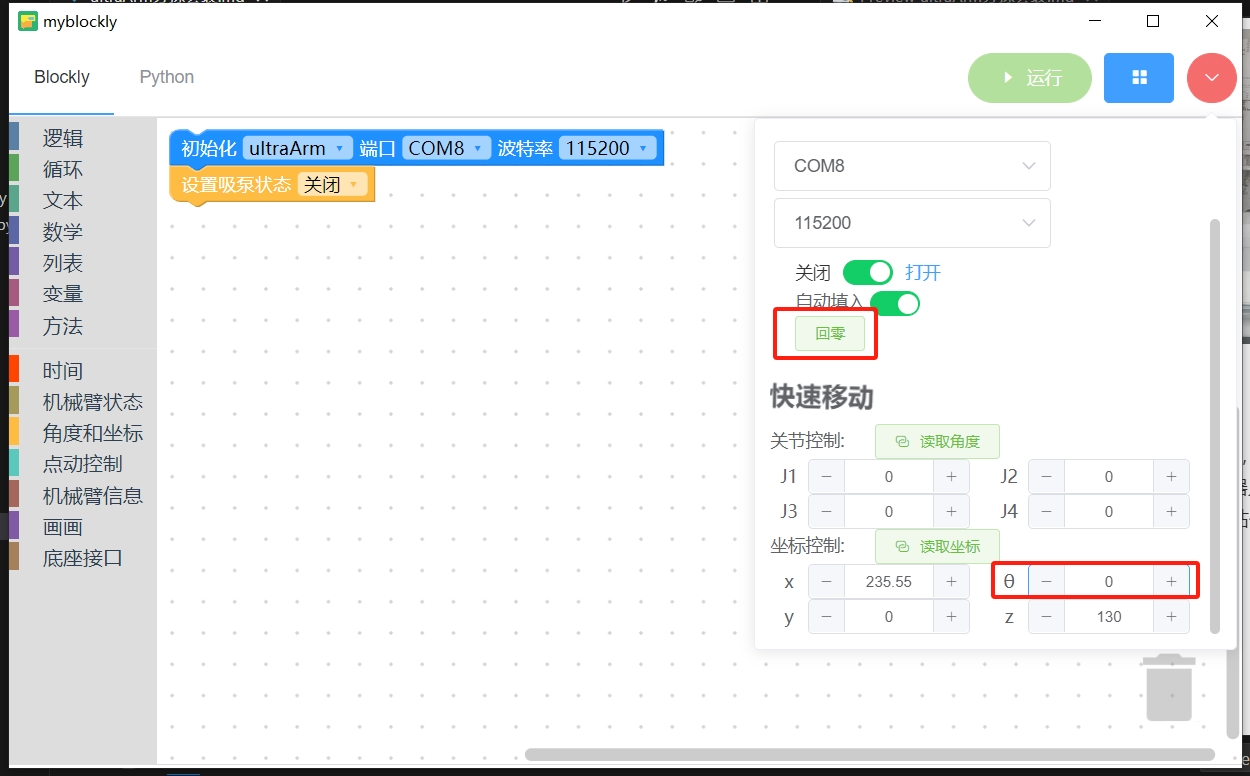
码垛机器人末端吸盘安装注意事项 拆垛机器人无特殊要求,码垛机器人需要先装舵机后,先使用myblockly对机器人进行回零操作后,将θ角设置成-38,之后再安装吸盘,安装时,吸盘的气管端要朝着机器人底座,线管可用魔术贴粘住。

8 最终搭建效果
