单元测试
1 文件介绍
核心文件介绍
| 文件名 | 功能 |
|---|---|
| Aruco_test.py | 相机编号测试 |
| Conveyor_test.py | 传送带测试 |
| Robot_test.py | 机械臂及末端工具测试 |
| Unstacking_Camera_hand_to_eye.py | 1号相机手眼标定 |
| Palletizing_Camera_hand_to_eye.py | 2号相机手眼标定 |
| demo. py | 套装功能展示 |
2 设备连接测试
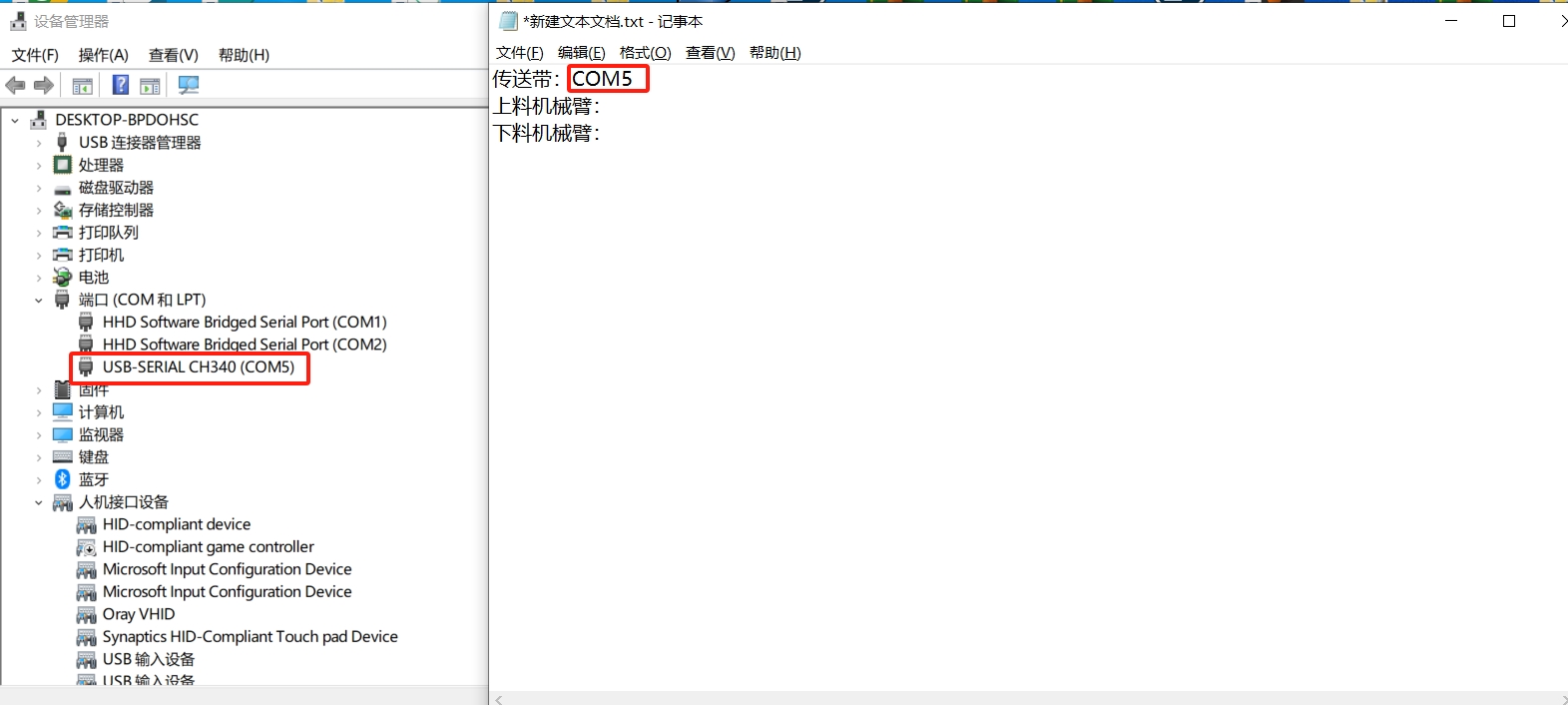
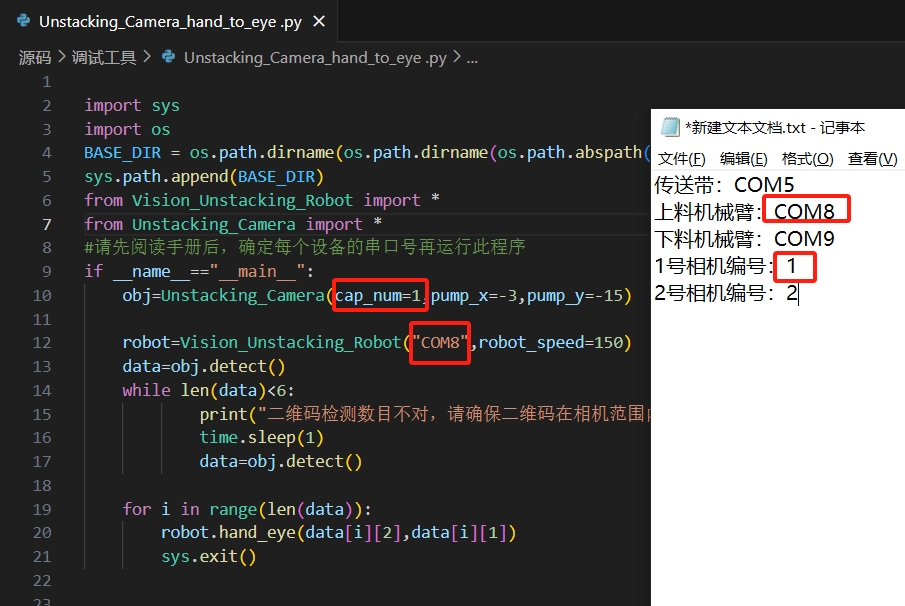
新建一个记事本文件,方便记录下每个设备的串口号,先将传送带与笔记本连接,在设备管理器查看串口号。
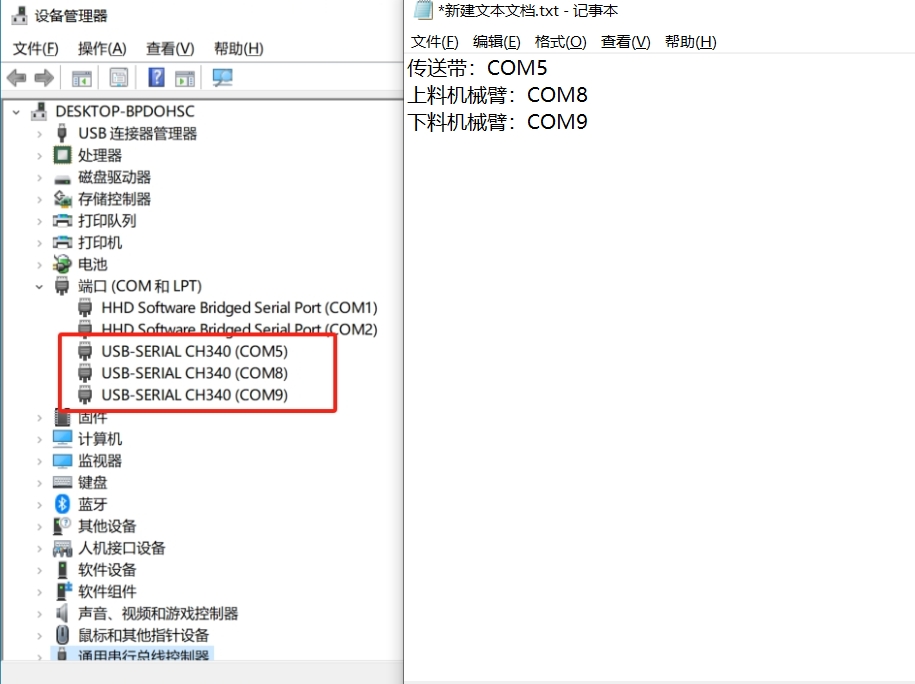
 然后按照相同的方法,依次确认上料机械臂和下料机械臂的串口号
然后按照相同的方法,依次确认上料机械臂和下料机械臂的串口号
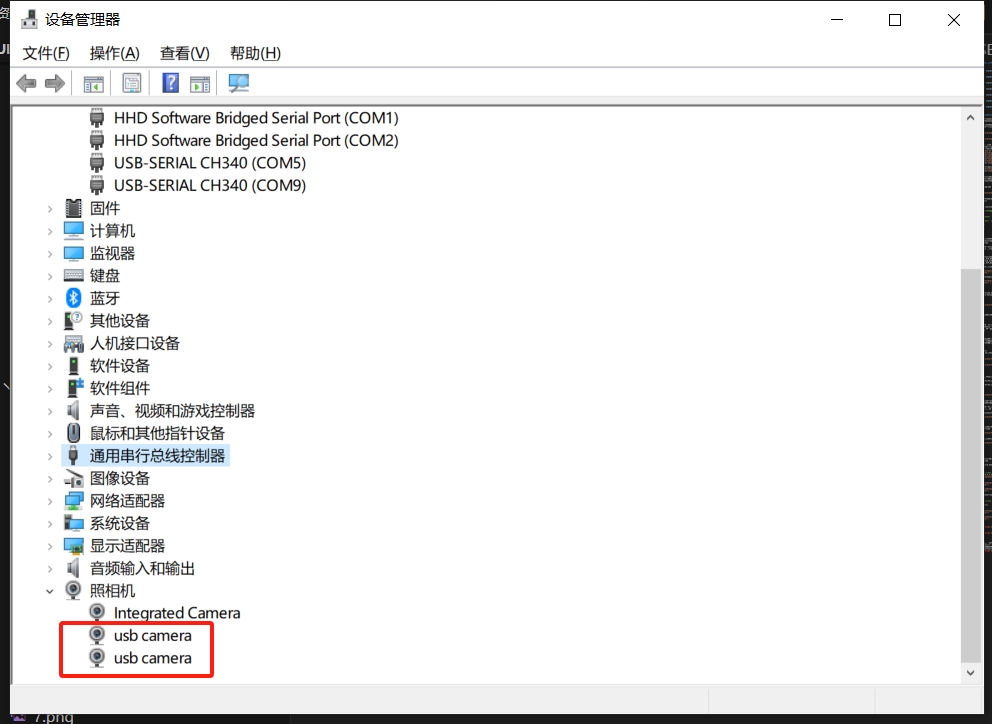
 然后将两个USB摄像头接入电脑,一个USB拓展坞只能连接一个USB摄像头,另一个摄像头必须与电脑直连,否则会造成数据冲突,在设备管理器查看相机是否连接
然后将两个USB摄像头接入电脑,一个USB拓展坞只能连接一个USB摄像头,另一个摄像头必须与电脑直连,否则会造成数据冲突,在设备管理器查看相机是否连接
3 机械臂及末端工具测试
打开Robot_test.py文件,将上料机械臂的串口号填入robot1,再将下料机械臂的串口号填入robot2,运行程序。上料机械臂会先进行回零,然后快换舵机会旋转一个角度,接着会打开吸泵2秒后再关闭。之后下料机械臂会重复上料机械臂刚刚的动作。

4 传送带测试
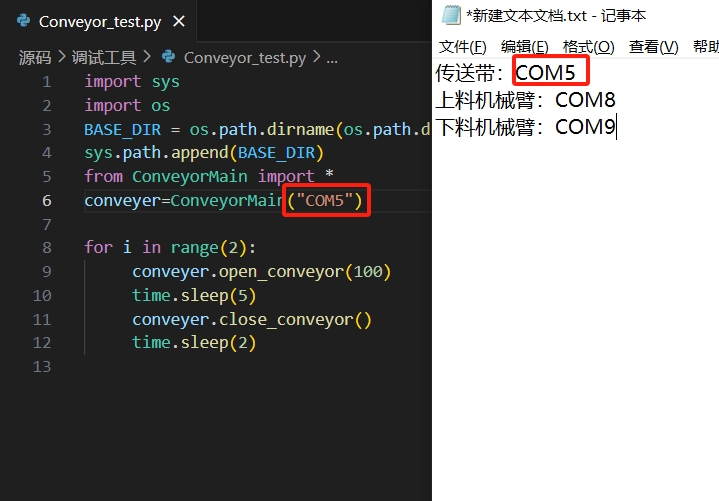
打开Conveyor_test.py程序,将传送带的串口号填入程序中,运行程序,传送带会运动一段时间后,自己停止。
5 相机测试
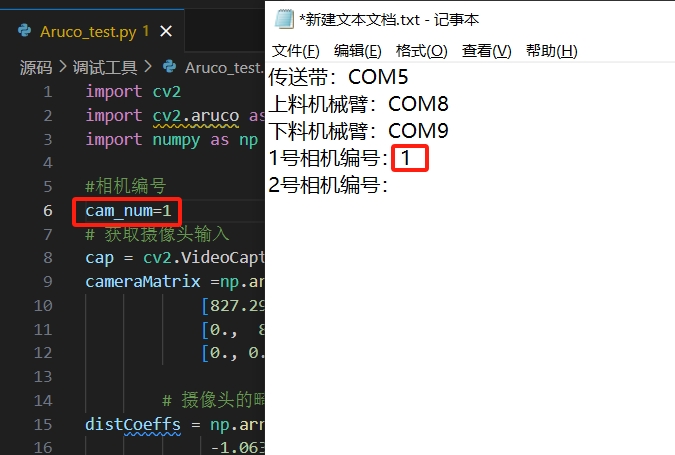
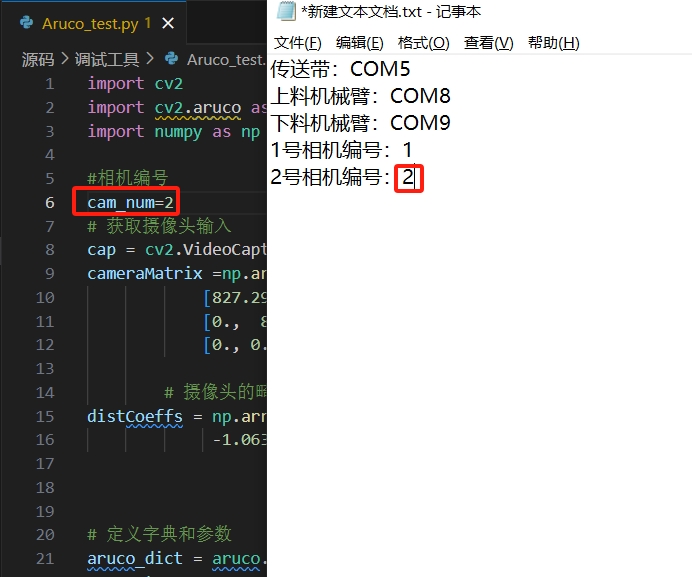
打开Aruco_test.py脚本,确定2个相机的相机编号。电脑会给相机分配编号,在变量cam_num切换1和2来确定哪个是1号相机和2号相机,然后将相机的编号记录下来。
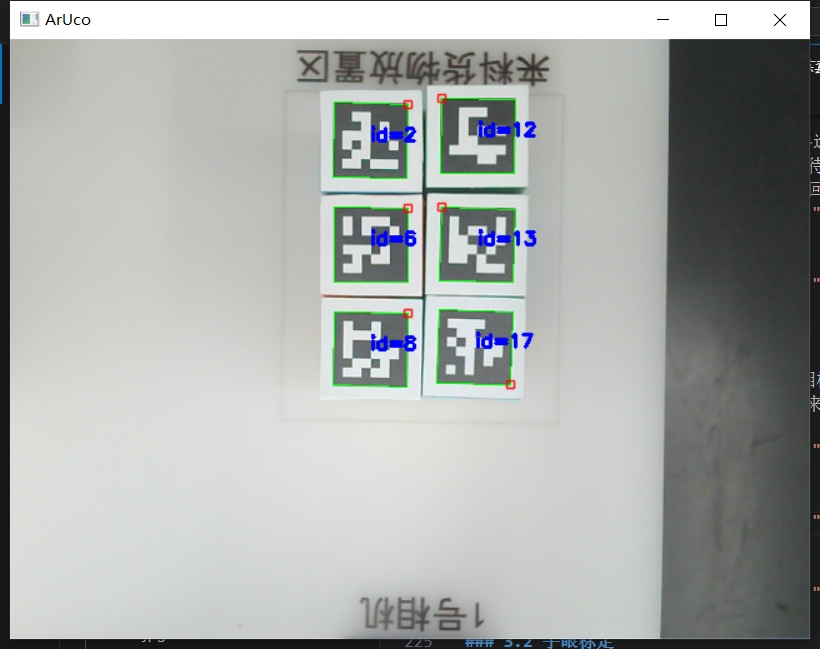
1号相机编号测试
若1号相机编号正确,会拍到上料区的画面
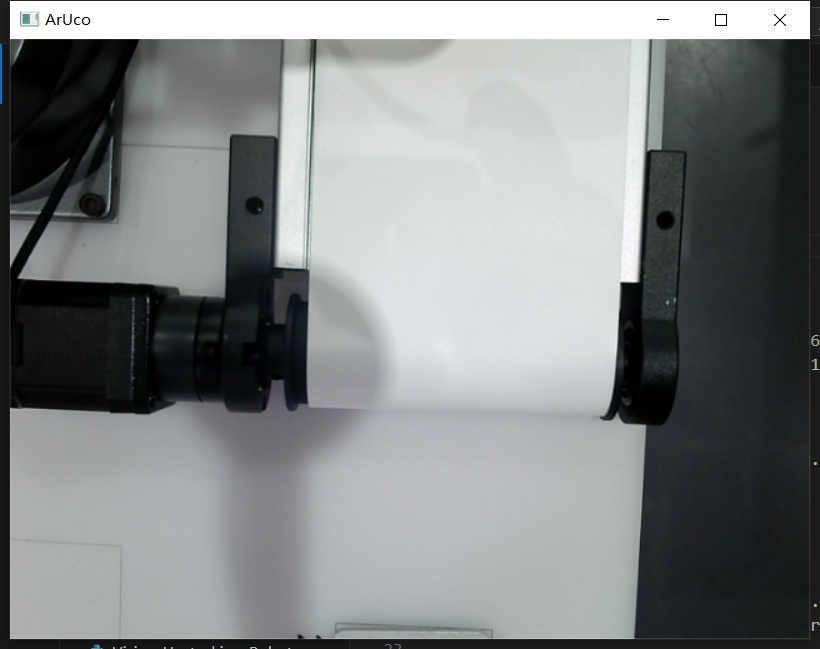
2号相机编号测试
若2号相机编号正确,会拍到传送带的画面
6 手眼标定
注意:两台机械臂已经过手眼标定,只需确定相机编号,看实际偏差,根据机械臂基坐标系进行微小调整

上料机械臂标定
将18个木块放到来料货物放置区。
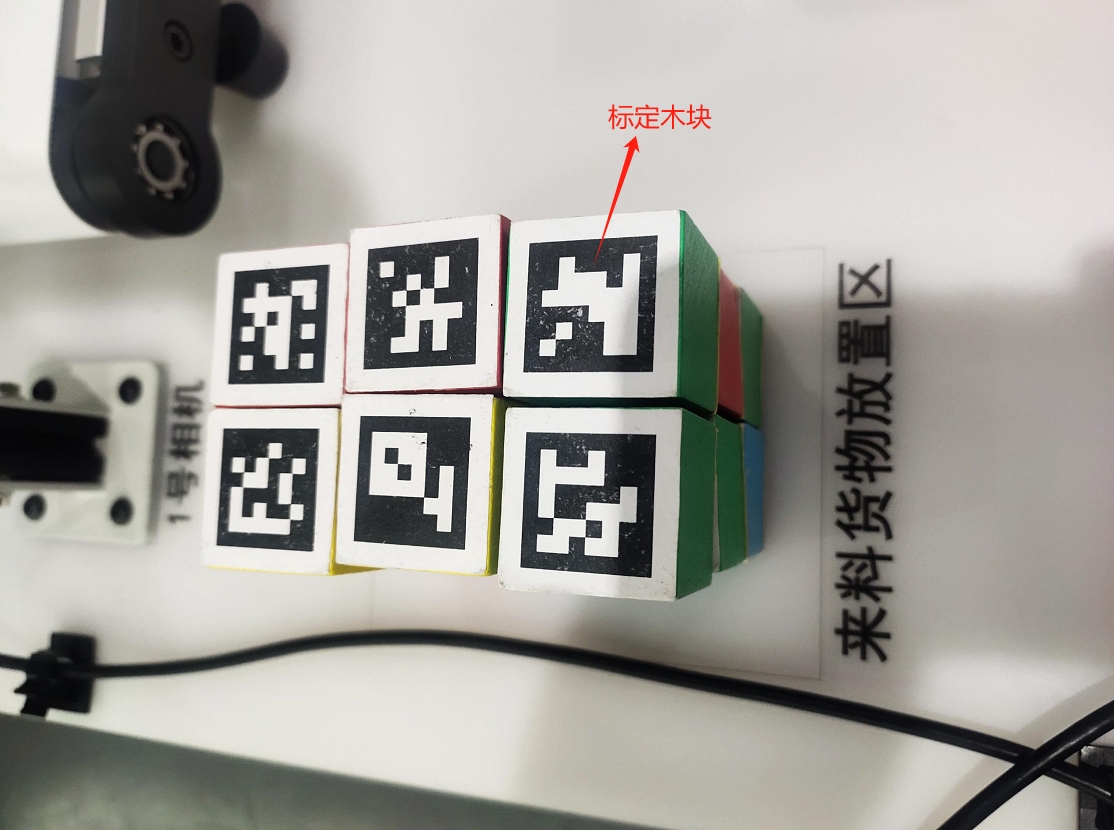 打开Unstacking_Camera_hand_to_eye.py,将上料机械臂的串口号和1号相机的相机编号填入程序中,然后运行程序。观察末端吸盘距离木块中心点有多少偏差,pump_x为末端吸盘对应机械臂基座标系的X方向偏移,pump_y为末端吸盘对应机械臂基座标系下的y方向偏差,标定结束后,不能移动相机和机械臂位置。
打开Unstacking_Camera_hand_to_eye.py,将上料机械臂的串口号和1号相机的相机编号填入程序中,然后运行程序。观察末端吸盘距离木块中心点有多少偏差,pump_x为末端吸盘对应机械臂基座标系的X方向偏移,pump_y为末端吸盘对应机械臂基座标系下的y方向偏差,标定结束后,不能移动相机和机械臂位置。
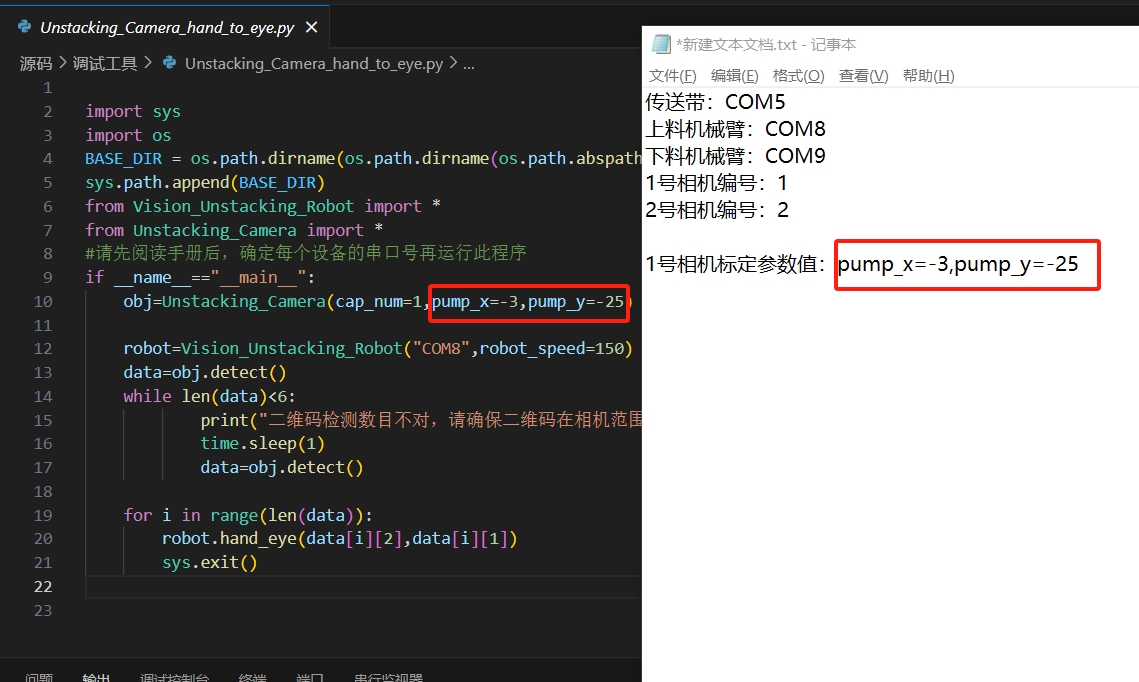
 通过测量可以看出,末端吸泵距离木块的抓取中心在机械臂基座标的Y轴负方向还差10mm,pump_y的值需要再减少10mm
通过测量可以看出,末端吸泵距离木块的抓取中心在机械臂基座标的Y轴负方向还差10mm,pump_y的值需要再减少10mm
 将pump_y的值在原有的基础上,减少10mm,重新运行程序。若能成功到达木块中心点,就将pump_x和pump_y记录下来。
将pump_y的值在原有的基础上,减少10mm,重新运行程序。若能成功到达木块中心点,就将pump_x和pump_y记录下来。
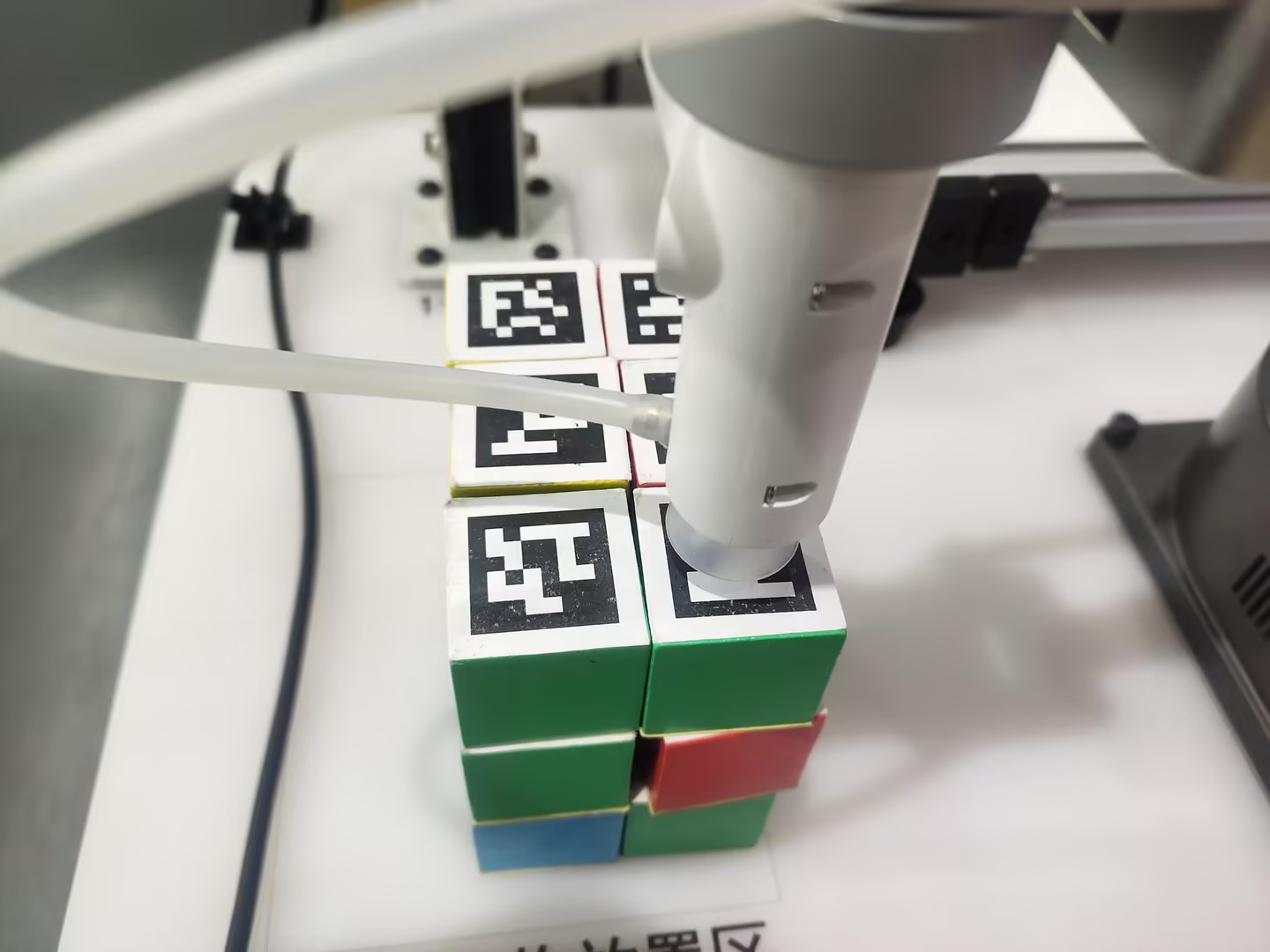
 标定成功参考
标定成功参考
下料机械臂标定
将一个木块放到2号相机视野下。
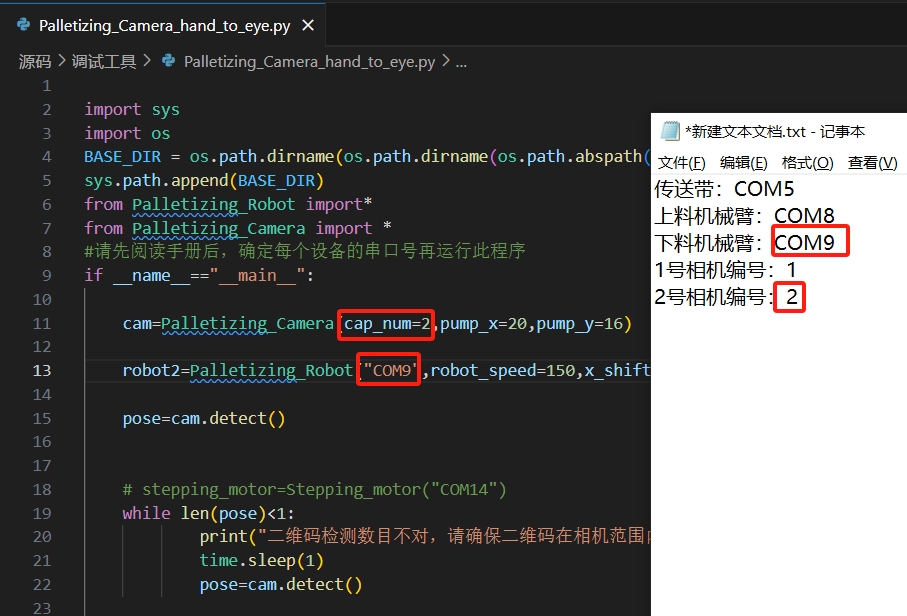
 打开Palletizing_Camera_hand_to_eye.py,将下料机械臂的串口号和2号相机的相机编号填入程序中,然后运行程序。观察末端吸盘距离木块有多少偏差,pump_x为末端吸盘对应机械臂基座标系的X方向偏移,pump_y为末端吸盘对应机械臂基座标系下的y方向偏移。记录下pump_x和pump_y的值,则标定结束,标定结束后,不能移动相机和机械臂位置。
打开Palletizing_Camera_hand_to_eye.py,将下料机械臂的串口号和2号相机的相机编号填入程序中,然后运行程序。观察末端吸盘距离木块有多少偏差,pump_x为末端吸盘对应机械臂基座标系的X方向偏移,pump_y为末端吸盘对应机械臂基座标系下的y方向偏移。记录下pump_x和pump_y的值,则标定结束,标定结束后,不能移动相机和机械臂位置。
 通过测量可以看出,末端吸泵距离木块的抓取中心在机械臂基座标的X轴正方向还差10mm,pump_x的值需要再增加10mm
通过测量可以看出,末端吸泵距离木块的抓取中心在机械臂基座标的X轴正方向还差10mm,pump_x的值需要再增加10mm
 将pump_x的值在原有的基础上,增加10mm,重新运行程序。若能成功到达木块中心点,就将pump_x和pump_y记录下来。
将pump_x的值在原有的基础上,增加10mm,重新运行程序。若能成功到达木块中心点,就将pump_x和pump_y记录下来。
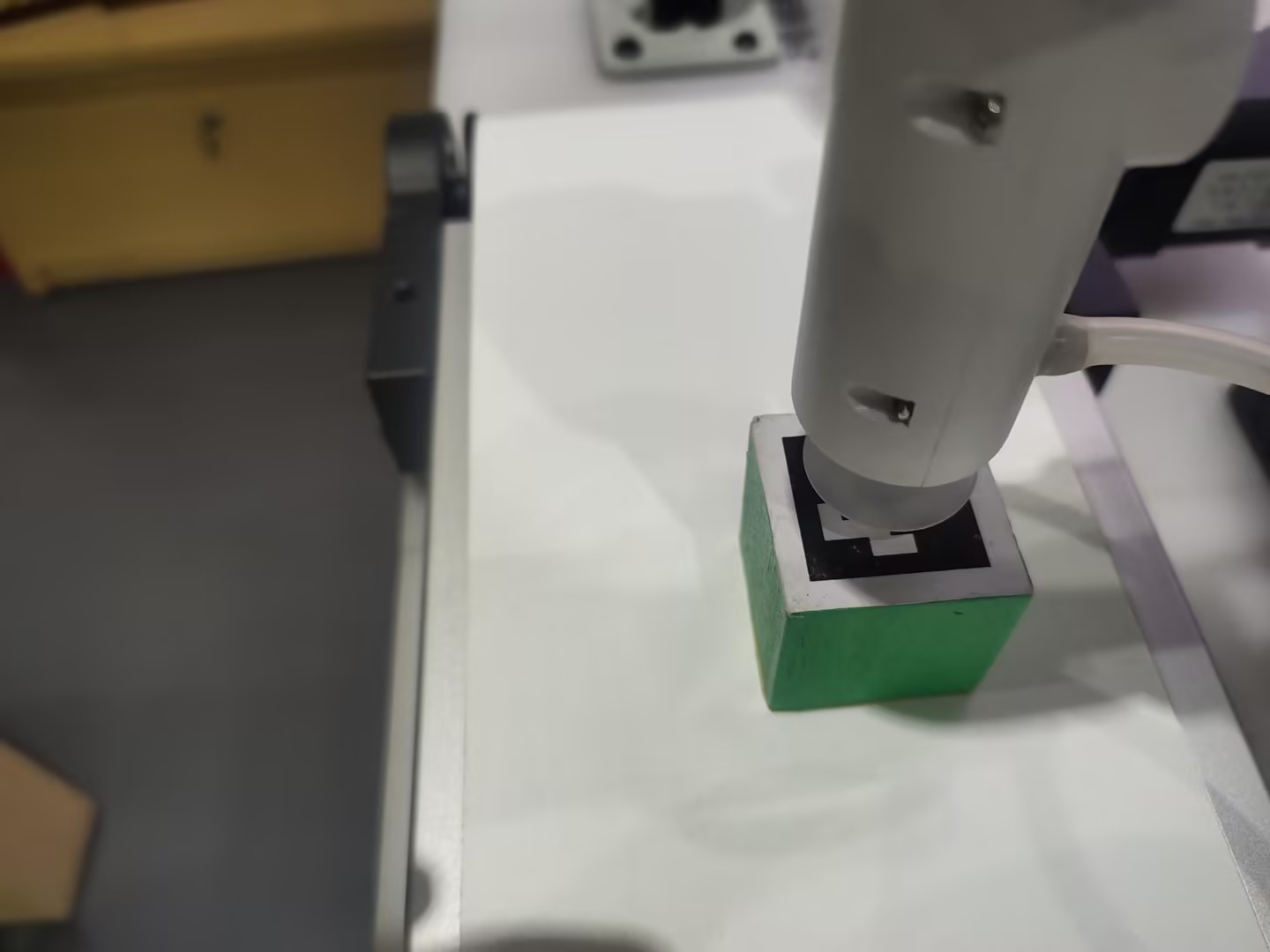
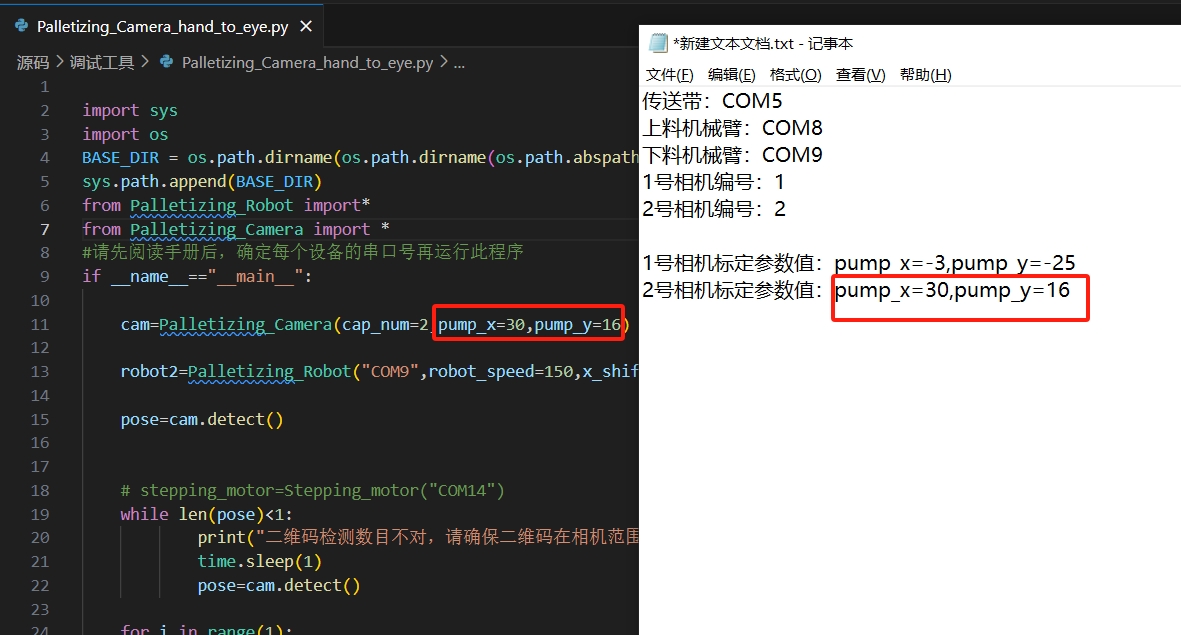 标定成功参考
标定成功参考
注意: 在标定时,不能移动被用来标定的木块