myGripper F100 力控夹爪
1 产品展示

2 产品简介
myCobot Pro 力控夹爪是一款高性能的机器人末端执行器,专为多功能抓取需求而设计。采用PC、PBT材料,经过精密注塑工艺制造,确保产品的坚固性和耐用性。夹爪的夹持范围为0-100毫米(默认指尖),支持多档力矩调节,满足不同力度的抓取需求。额定负载为500克,重复定位精度达0.5毫米,可适应各种机器人夹取操作场景。
3 适配机型
ER myCobot 320系列
ER Mercury A/B/X系列
ER myCobot Pro 630
ER myCobot Pro 600
其他通用机器人
4 适用场景
实验操作:在科研实验中,完成试管、器皿等的抓取和移动,确保实验的安全和准确性。
教育演示:作为教学工具,帮助学生理解机器人抓取原理,培养实践能力。
物料搬运:在模拟生产线或仓储中,搬运各种规格的物料,提高工作效率。
5 规格说明
产品规格参数
| 名称 | myGripper F100 力控夹爪 |
|---|---|
| 材料 | PC、PBT |
| 尺寸 | 156X106X61mm |
| 工艺技术 | 注塑 |
| 夹取范围 | 0-100毫米(默认指尖) |
| 重复性精度 | 0.5 mm |
| 使用寿命 | 30万次开合 |
| 驱动模式 | 电驱动 |
| 传动方式 | 齿轮+连杆 |
| 重量 | 340 g |
| 额定负载 | 500g |
| 工作电压 | 24V |
| 固定方法 | 螺丝固定 |
| 使用环境要求 | 常温常压 |
| 控制接口 | RS485/IO 控制/按键控制 |
| 线缆接口型号 | M8-8PIN |
引脚线序说明
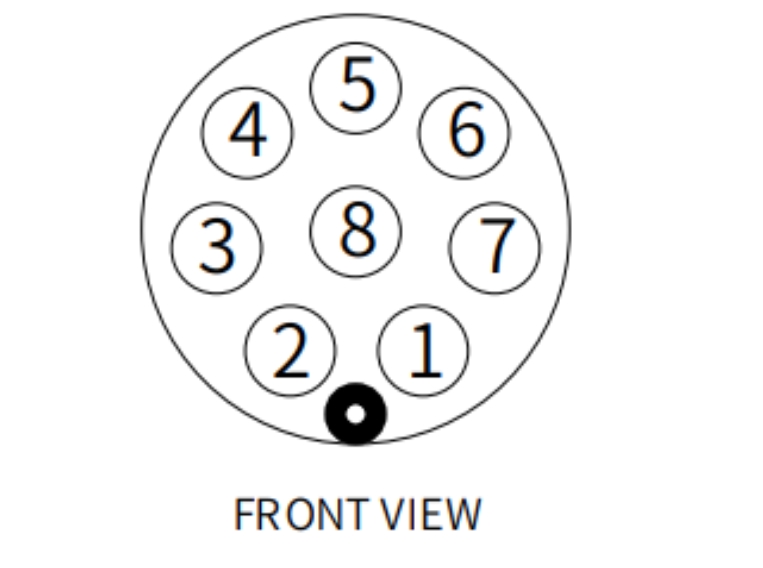

编号1,5 连接GND与24V,编号2,3 为控制 IO 输入,编号6,7 为 IO 输出,编 号4,8为485 通信,是与夹爪接收与发送指令
注意事项:
请根据线标区分线序,如出现线标丢失、脱落、遗忘等情况,请联系我 司工作人员,配合确定线序。如不联系我司工作人员,因接错线序,导致夹爪 损坏,后果自负
5.1 工作原理
在电机的驱动下,机械手的手指表面做直线往复运动,实现打开或关闭动作。通过设置夹持力矩,使工件的冲击最小,定位点可控,夹紧可控。
5.2 组装步骤
以mycobot320为例子,其余机型可参考此步骤进行安装
用螺丝和垫片将夹爪连接件安装到机械臂末端法兰
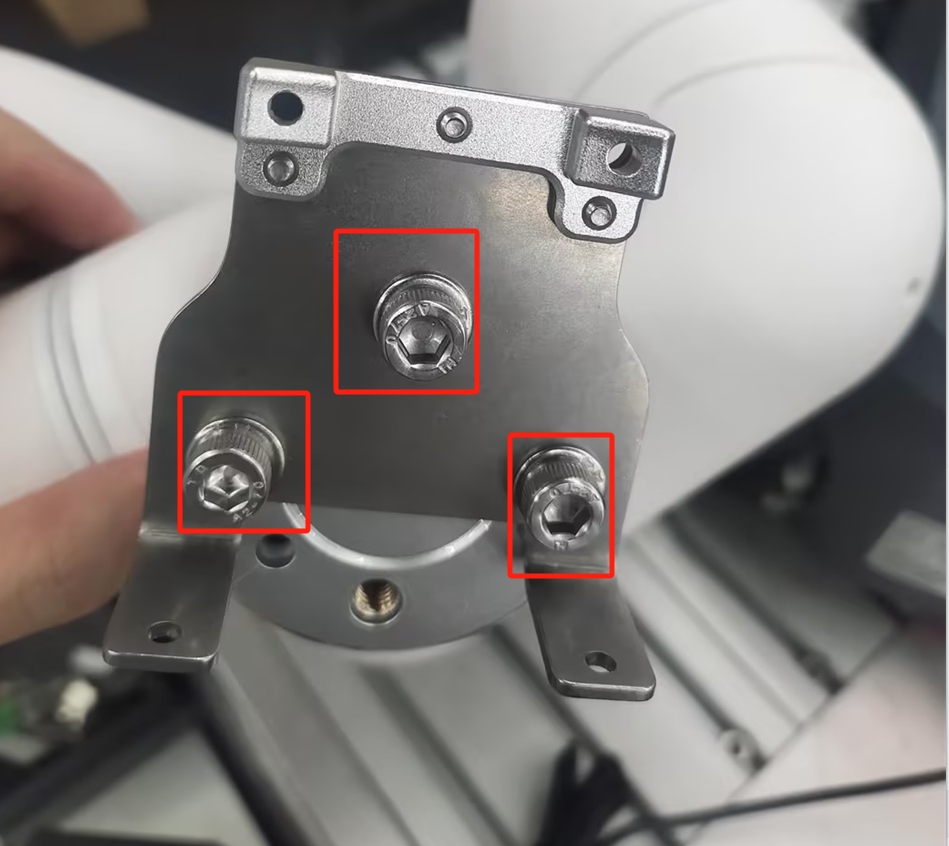
再用螺丝将夹爪安装在连接件上

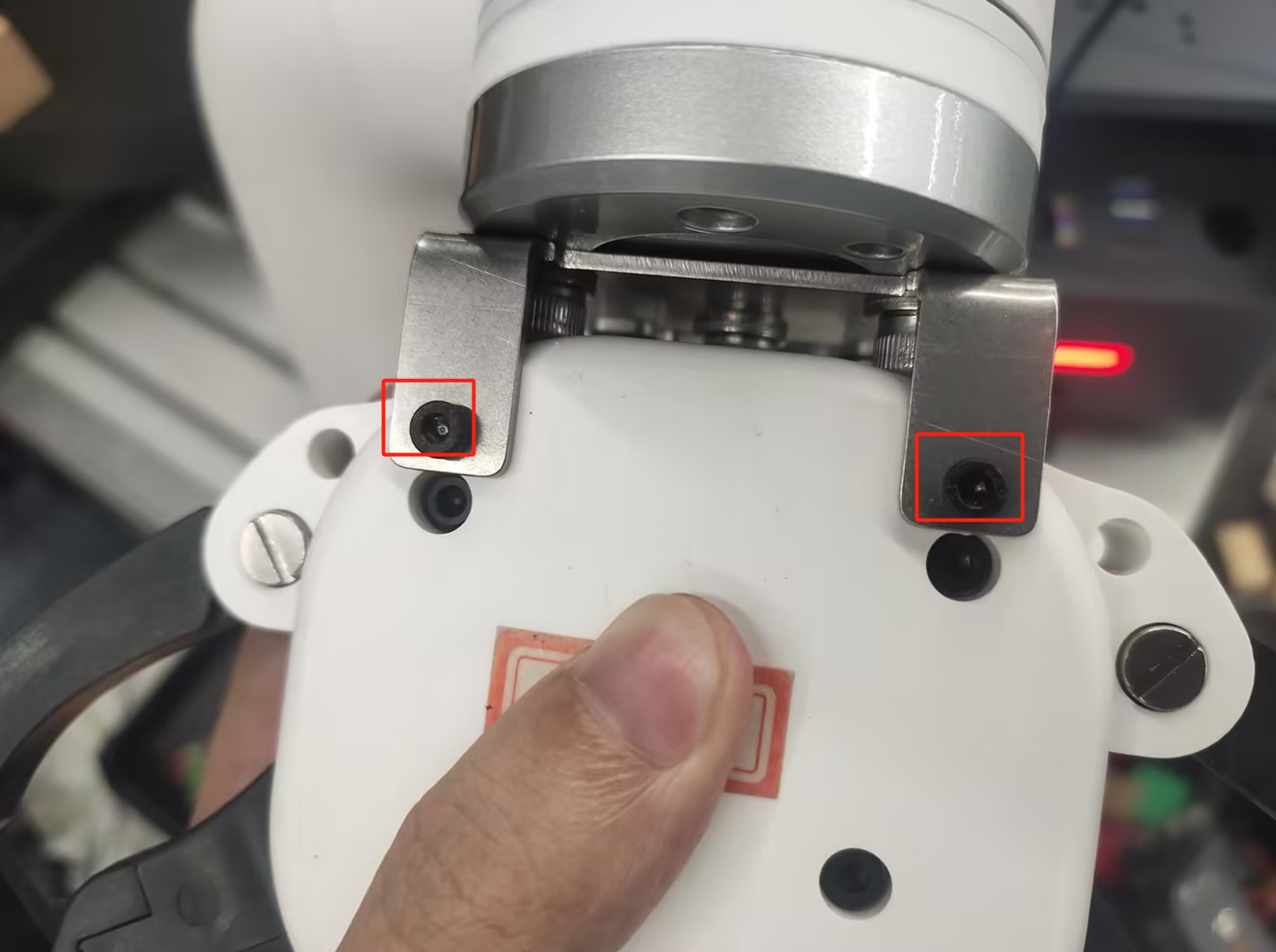
最后用M8航空线将夹爪和机械臂进行连接

5.3 控制方式
- 支持python、ros、串口控制
- pthon:请跳转至大象机器人主机类产品配件使用章节,查看python控制方式
- 屏幕IO按键控制
- 串口控制
- ros控制
屏幕控制
myCobot Pro 力控夹爪带有屏幕显示功能,并且屏幕下带有按键方便对屏幕的操 控,通过对界面的选择,可以更加便捷的操控夹爪与了解夹爪信息。屏幕信息和 整体功能描述
| 界面 | 功能 |
|---|---|
| 主界面 | 查看夹爪信息,如:位置(Position) 设置速度(Speed) 电流 (Current) 输入 IO(Input) 输出 IO(Output) |
| 设置界面(Setting) | 查看,设置夹爪数据 |
| 设置波特率界面(Modbus Config) | 查看和更改设备波特率 |
| IO 使能界面(IO Config) | 查看和使能 IO,默认 IO 是使能状态 |
| 夹爪控制界面(Manual Config) | Open-控制夹爪张开 Close-控制夹爪闭合 Release-夹爪不使能(这时候夹爪就不会有扭力,可以自由摆动爪) Hold - 夹爪使能(给夹爪使能,这时候夹爪存在扭力) |
| 版本信息界面(Information) | Firmware - 固件版本号 Servomotor - 夹爪版本号与夹爪 ID |
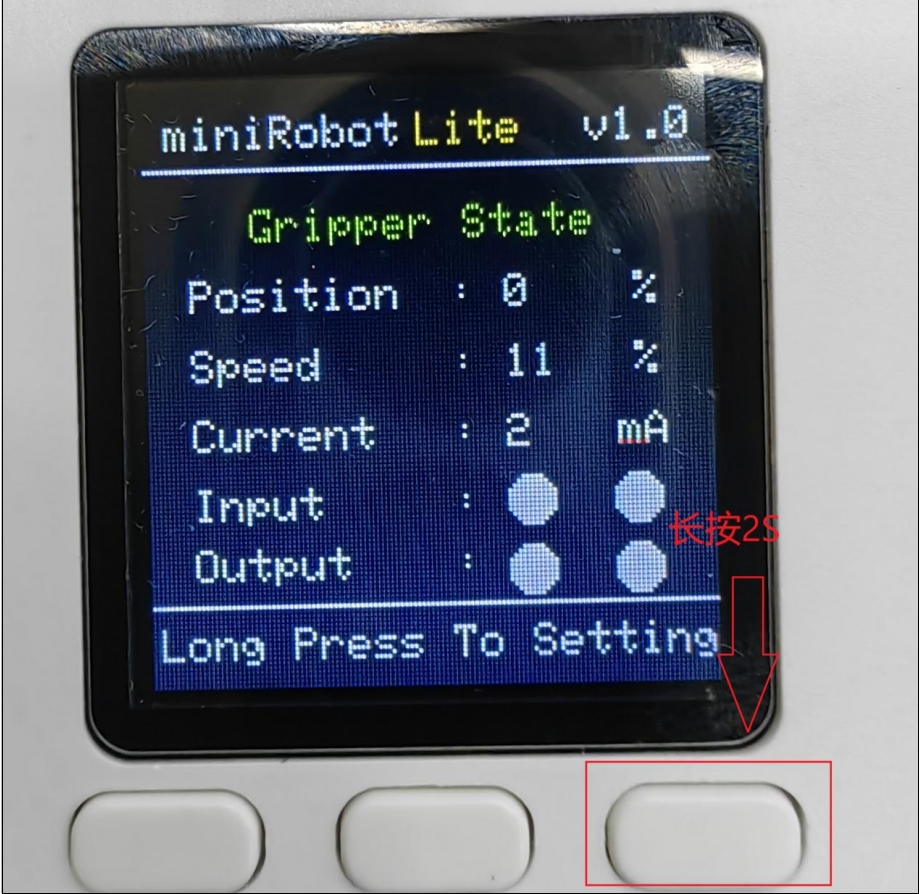
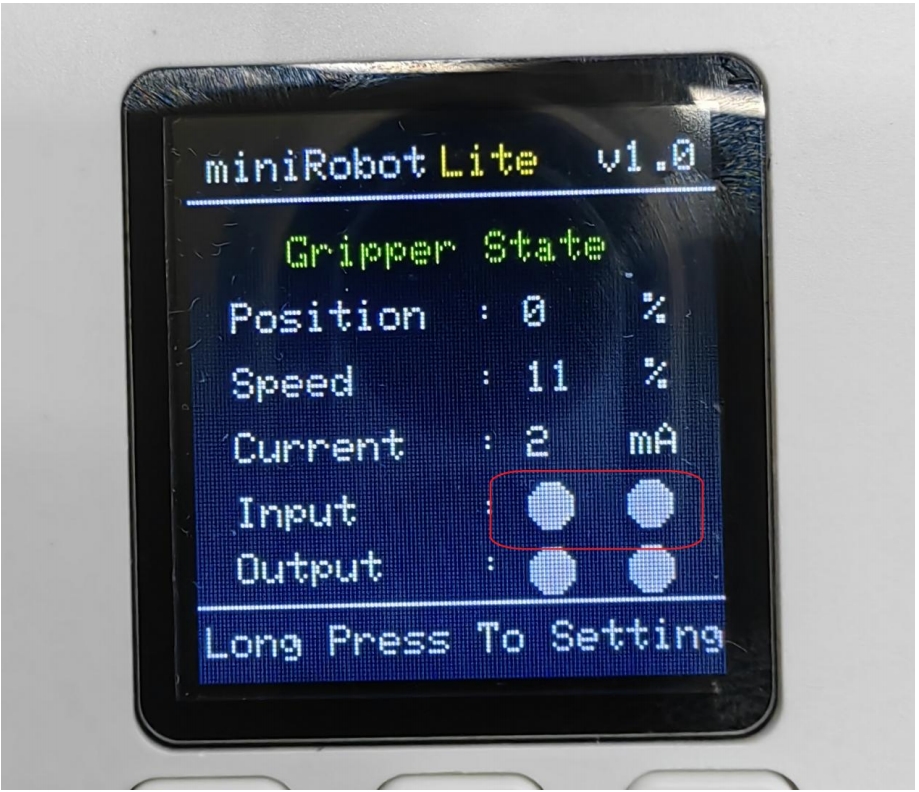
主界面
进入夹爪主界面,我们可以看到屏幕上实时获取夹爪的一些信息,这能更方 便的知道夹爪的信息。主界面主要有以下信息 如图所示

主界面上实时显示夹爪角度,速度,电流,输入输出 IO 电平
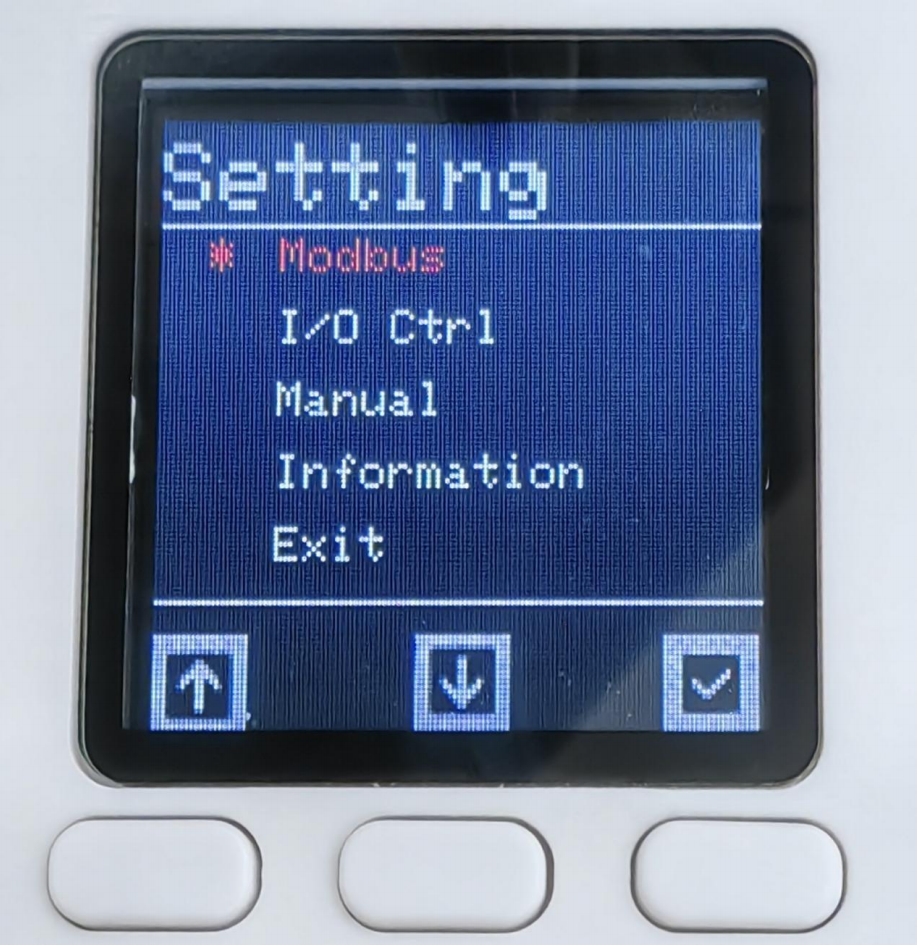
设置界面
主界面下长按确认键 2s 即可进入主界面
设置界面,通过按键可以上下移动和选择
波特率设置
在设置界面点击 Modbus 进入 Modbud Config 界面点击 Baudrate 进入界面,选择你想设置的波特率点击确认,当波特率傍边的原点颜色改变证明设置成功
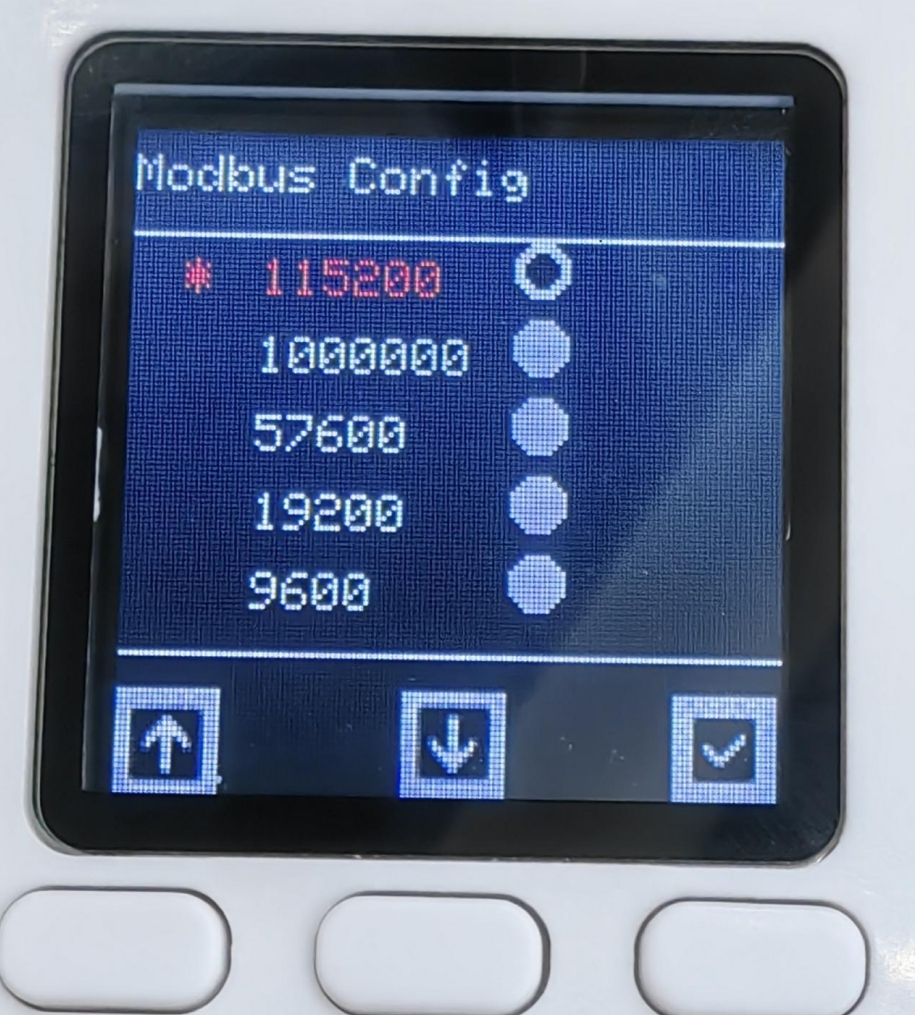
设置完后找到 Exit 点击即可退出当前界面
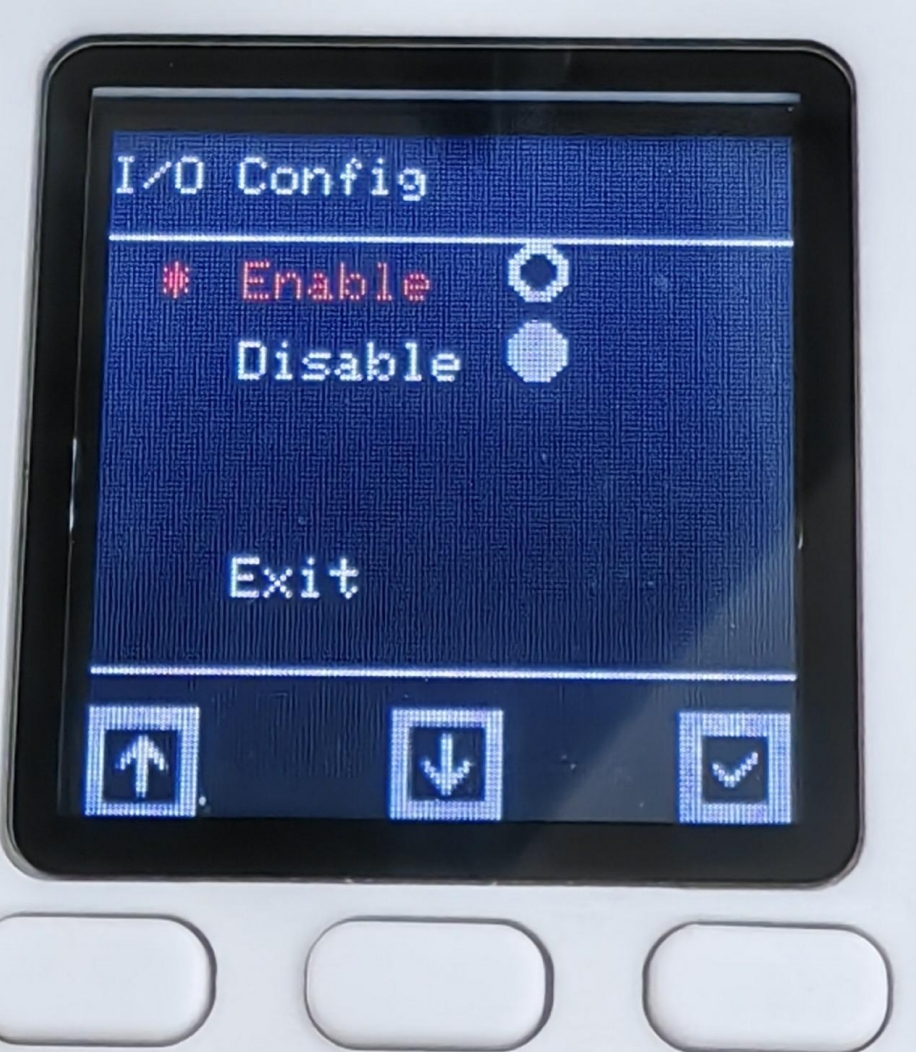
IO 使能设置
设置界面选择 I/O Ctrl,进入 I/O Config 界面,默认下 IO 是使能状态,如果不行,使用 IO 控制,可以选择 Disable 来关闭 IO 控制
Manual 界面
设置界面选择 Manual 进入 Manual Control 界面实现快速便捷的操控夹爪
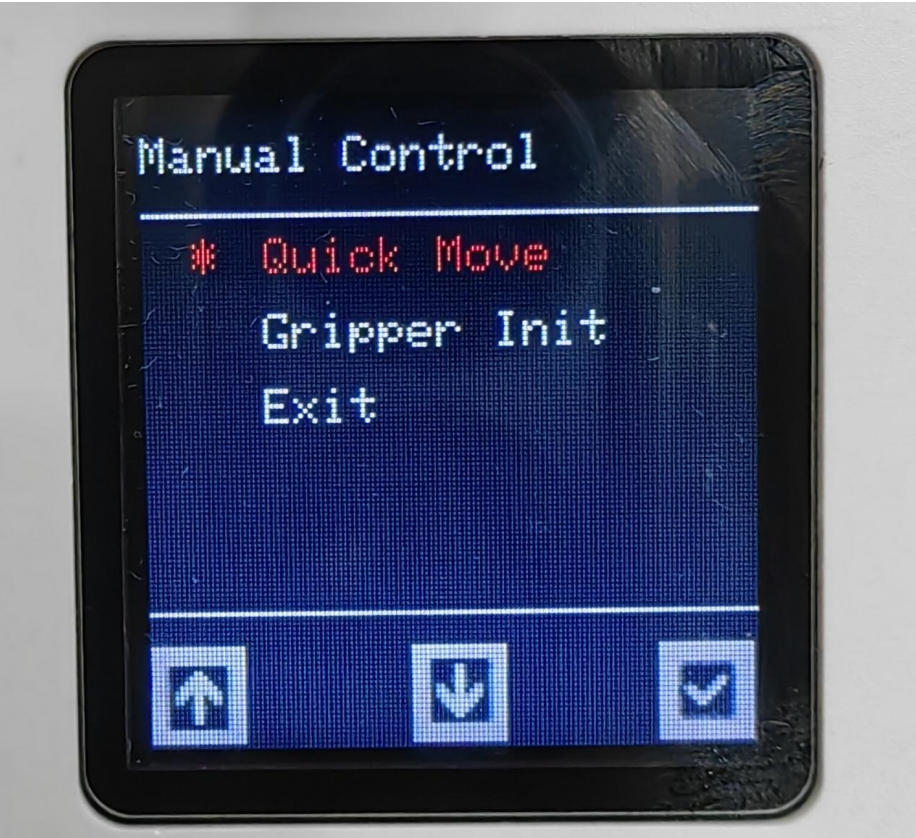
选择 Quick Move 即可进入控制夹爪界面,如图 4.7,选择 Gripper Init 可进入 夹爪配置界面
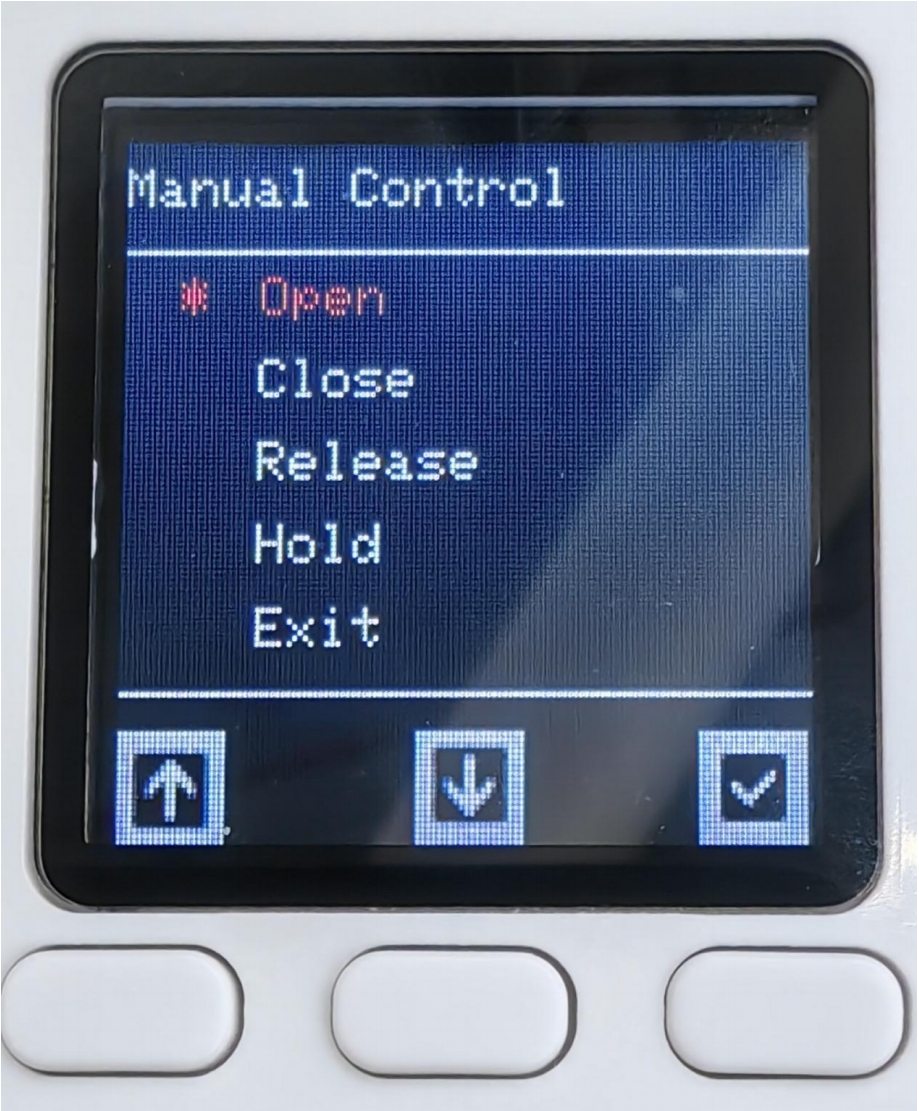
Open-设置夹爪张开,Close-设置夹爪闭合,Pelease-设置夹爪不使能,Hold-设置夹爪使能,Exit-退出当前界面
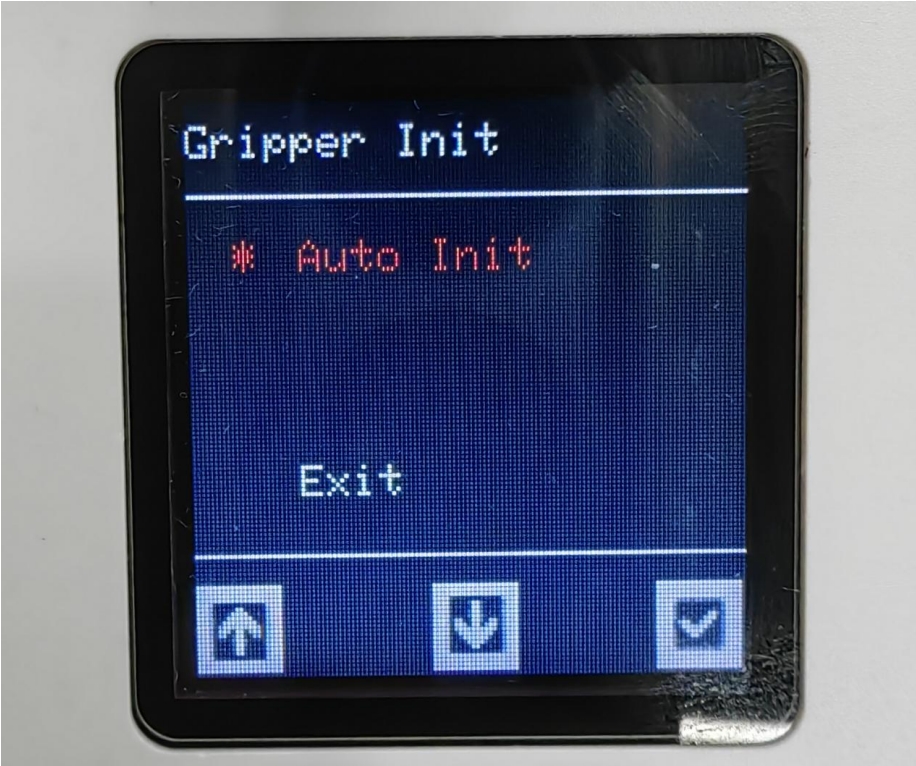
选择 Auto Init 可设置夹爪零位
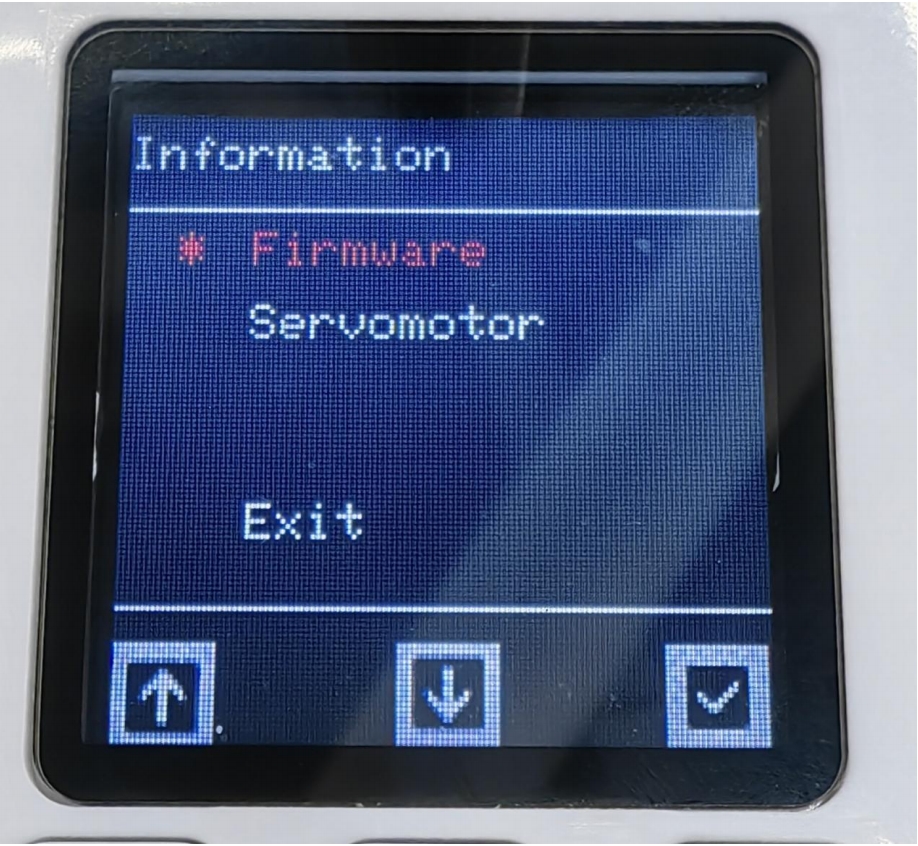
Information 界面
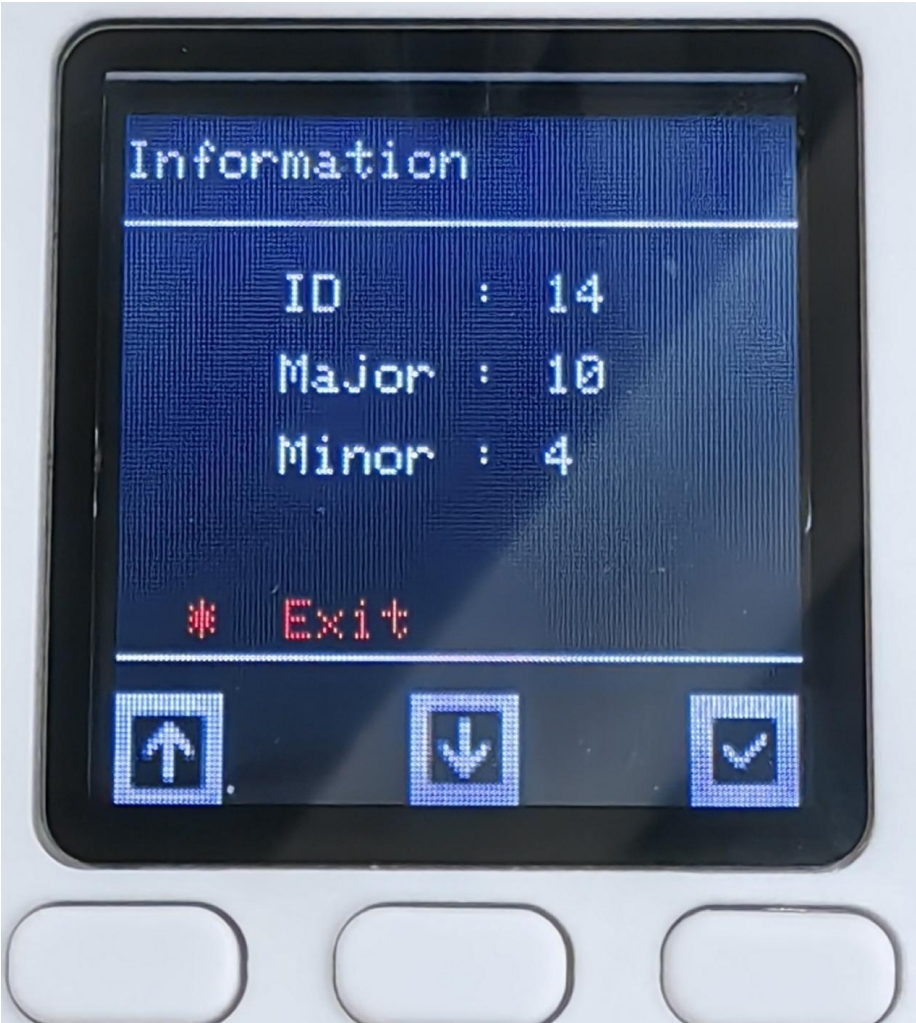
通过选择 Information 进入界面,我们可以看到 Firmware 和 Servomotor 两个选 项,前者是固件版本号,点击进去,可以查看当前固件主版本与次版本号。后者 是查看点击信息,点击进去可以看到 ID 与电机的主版本和次版本
点击 Firmware 查看固件版本与设备 ID 指令中的 ID

点击 Servomotor 查看电机版本与 ID,ID 无法修改
IO 控制
根据上述的引脚线序说明,找到 OUT1 OUT2 对应的线,输入 24V,当输入一高一低电平 时夹爪就会运动,相反给出一高一低电平时夹爪就会反向运动。屏幕主界面上可以观察到 IO 输入情况,当没有 IO 输入是 Input 就显现白色,当 IO 输入时就会显现黑点
串口控制方法
USB-485模块接线:
连接夹爪端的 24V,GND, 485_A(T/R+,485+) , 485_B(T/R-,485-)共 4 根线,电源为24V直流稳压电源,将模块的 USB 插口插入到电脑的 USB 接口

485A 接入 485 转 USB 模块 A+;
485B 接入 485 转 USB 模块 B-;
24V 接入 24V 直流稳压电源正极;
GND 接入 24V 直流稳压电源负极
串口调试助手调试:
用户可用UartAssist串口调试助手,参考下图发送相应的夹爪指令,CRC校验码无需填写,UartAssist串口调试助手会自动生成。
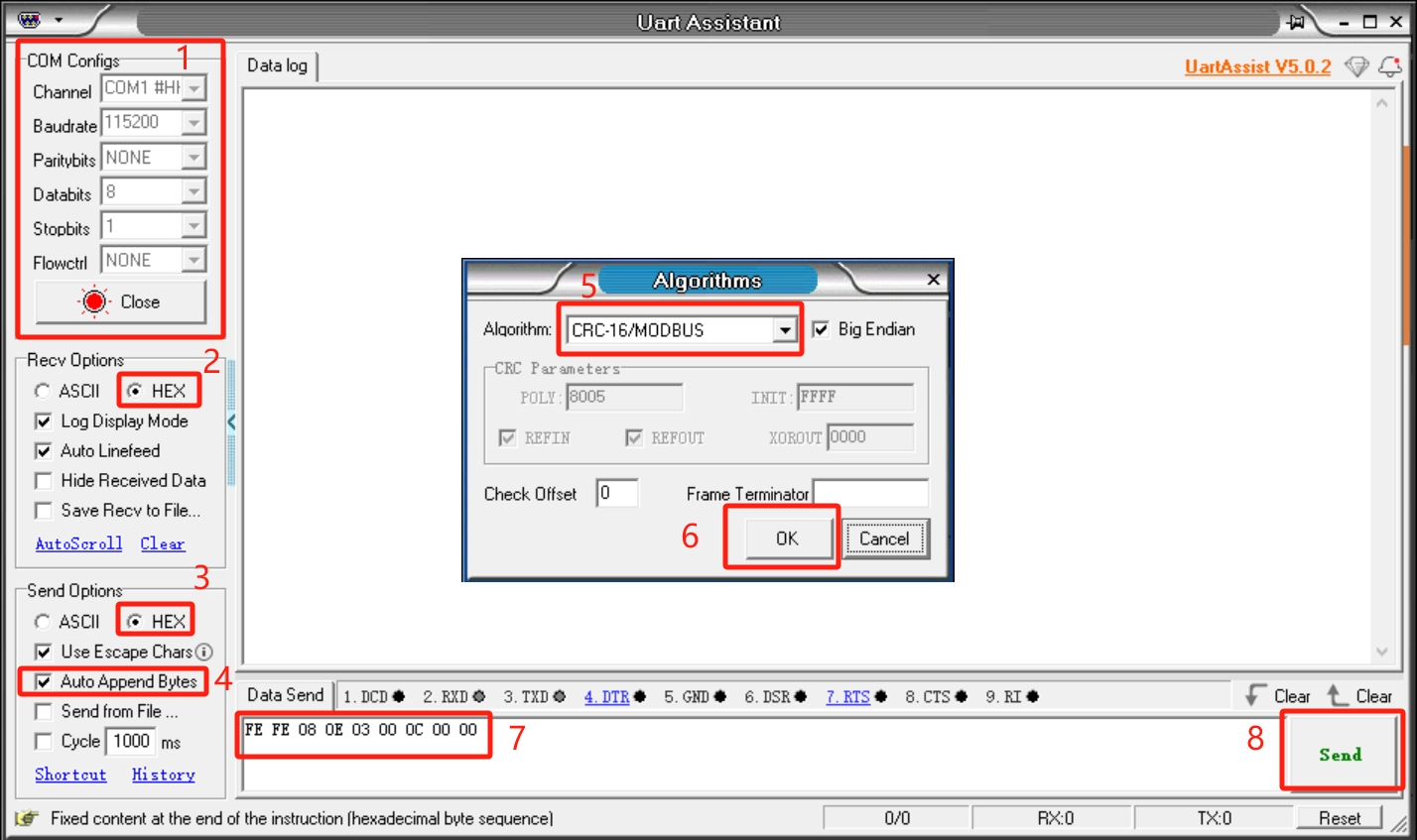
夹爪串口默认配置
- 夹爪 ID:14
- 波特率:115200
- 数据位:8
- 停止位:1
- 校验位:无校验位
协议使用说明
夹爪采用自定义协议,一条指令由帧头(2byte),长度(1byte),地址码 ID(1byte),功能码(1byte),寄存器地址(2byte),寄存器数据(2byte),校验码(2byte),我们以读取夹爪角度为例
| 帧头 | 长度 | ID | 功能码 | 寄存器地址 | 寄存器数据/参数 | CRC-16MODBUS校验码 |
|---|---|---|---|---|---|---|
| Fe Fe | 08 | 0e | 03 | 00 0C | 00 00 | B1 C0 |
帧头:254 254
长度:指令长度 08
ID: 0E,可以在设备中修改,默认 ID 为 14 ,0E 代表夹爪当前 ID 为 14
功能码:识别指令是设置还是获取功能,06(对寄存器进行写操作)/03(对寄存器进行读操作)。
寄存器地址:00 0c 夹爪功能对应寄存器地址
寄存器参数:00 00,读取指令中不需要参数,可以给 00 00,在设置指令中为参数对夹爪地址写入数据。
CRC 校验:B1 C0,保证终端设备不去响应那些在传输过程中发生改变的数据,保证系统的安全性和效率,CRC 校验采用 16 位的循环余方法 。将帧头,长度,功能码,寄存器地址,寄存器参数所有16进制直接进行校验得到 B1 C0 校验码。
命令总览
读取固件主版本号
指令:fe fe 08 0e 03 00 01 00 00 72 51
功能码:03 读操作
参数:无
返回:fe fe 08 0e 03 00 01 00 01 B2 90
标注:数据返回 00 01,返回版本号为 1
读取固件次版本号
指令:FE FE 08 0E 03 00 02 00 00 72 A1
功能码:03 读操作
参数:无
返回:FE FE 08 0E 03 00 02 00 01 B2 60
标注:数据返回 00 01,表示返回版本号为 1
设置/读取设备 ID 号
设置
指令:FE FE 08 0E 06 00 03 00 0E 76 BD
功能码:06 写操作
参数:00 0E,ID 设置范围(1-254)
返回:FE FE 08 0E 06 00 03 00 01 72 FD
标注:成功返回 00 01,失败返回 00 00,设备 ID 修改后,指令中的 ID 也需要修改 成一样才可以通信
读取
指令:FE FE 08 0E 03 00 04 00 00 73 41
功能码:03 读操作
参数:无
返回:FE FE 08 0E 03 00 04 00 0E B7 C0
标注:数据返回 00 0E,表示当前夹爪 ID 号
设置/读取 485 波特率
设置
指令:FE FE 08 0E 06 00 05 00 00 73 1D
功能码:06 写操作
参数:参数 00 00,0-115200,1-1000000,2-57600,3-19200,4-9600,5-4800, 如设置为 1000000,参数改为 00 01
返回:FE FE 08 0E 06 00 05 00 01 72 FD
标注:成功返回 00 01,失败返回 00 00
读取
指令:FE FE 08 0E 03 00 06 00 00 B3 E0
功能码:03 读操作
参数:无
返回:FE FE 08 0E 03 00 06 00 00 B3 E0
标注:返回数据 00 00,与设值参数对应波特率的值
设置夹爪使能状态
指令:FE FE 08 0E 06 00 0A 00 00 B0 EC
功能码:06 写操作
参数:00 00, 00 表示断使能, 00 01 表示使能
返回:FE FE 08 0E 06 00 0A 00 01 70 2D
标注:成功返回 00 01,失败返回 00 00
设置/读取夹爪角度
设置
指令:FE FE 08 0E 06 00 0B 00 64 9B BC
功能码:06 写操作
参数:参数 00 64,设置角度为全开
返回:FE FE 08 0E 06 00 0B 00 01 B0 7C
标注:成功返回 00 01,失败返回 00 00
读取
指令:FE FE 08 0E 03 00 0C 00 00 B1 C0
功能码:03 读操作
参数:无
返回:FE FE 08 0E 03 00 0C 00 64 5A C1
标注:返回数据 00 64,表示当前角度为 100,全开状态
设置夹爪零位
指令:FE FE 08 0E 06 00 0D 00 00 71 5D
功能码: 06 写操作
参数:无
返回:FE FE 08 0E 06 00 0D 00 01 B1 9C
标注:成功返回 00 01,失败返回 00 00
注意:设置零位时夹爪会自行运动,若运动过程中有物体阻碍会导致设置失败,设置前请检查夹爪周围是否有阻碍物
读取夹爪夹持状态
指令:FE FE 08 0E 03 00 0E 00 00 71 61
功能码:03 读操作
参数:无
返回:FE FE 08 0E 03 00 0E 00 01 B1 A0
标注:00 01,返回数据 0为正在运动 ,1为停止运动,未检测到夹到物,2为停止运动,检测到夹住物体,3为检测到夹住物体,物体掉落
设置/读取夹爪 P 值
设置
指令:FE FE 08 0E 06 00 0F 00 64 5A FD
功能码:06 写操作
参数:参数 00 64,设置 P 值为 100,设置范围(1-150)
返回:FE FE 08 0E 06 00 0F 00 01 71 3D
标注:成功返回 00 01,失败返回 00 00
读取
指令:FE FE 08 0E 03 00 10 00 00 77 01 功能码:03 读操作 参数:无 返回:FE FE 08 0E 03 00 10 00 64 9C 00 标注:返回数据 00 64,表示当前 P 值为 100
设置/读取夹爪 D 值
设置
指令:FE FE 08 0E 06 00 11 00 64 5C 9D
功能码:06 写操作
参数:参数 00 64,设置 D 值为 100,设置范围(1-150)
返回:FE FE 08 0E 06 00 11 00 01 77 5D
标注:成功返回 00 01,失败返回 00 00
若夹爪出现抖动,可适当增大 D 值
读取
指令:FE FE 08 0E 03 00 12 00 00 B7 A0
功能码:03 读操作
参数:无
返回:FE FE 08 0E 03 00 12 00 64 5C A1
标注:返回数据 00 64,表示当前 D 值为 100
设置/读取夹爪 I 值
设置
指令:FE FE 08 0E 06 00 13 00 00 77 3D
功能码:06 写操作
参数:参数 00 00,设置 I 值为 0,设置范围(1-150)
返回:FE FE 08 0E 06 00 13 00 01 B7 FC
标注:成功返回 00 01,失败返回 00 00
读取
指令:FE FE 08 0E 03 00 14 00 00 B6 40
功能码:03 读操作
参数:无
返回:FE FE 08 0E 03 00 14 00 00 B6 40
标注:返回数据 00 00,表示当前 I 值为 0
设置/读取夹爪顺时针可运行误差
设置
指令:FE FE 08 0E 06 00 15 00 01 B6 1C
功能码:06 写操作
参数:参数 00 01,设置值为 1,设置范围(0-16)
返回:FE FE 08 0E 06 00 15 00 01 B6 1C
标注:成功返回 00 01,失败返回 00 00
读取
指令:FE FE 08 0E 03 00 16 00 00 76 E1
功能码:03 读操作
参数:无
返回:FE FE 08 0E 03 00 16 00 01 B6 20
标注:返回数据 00 01,表示当前值为 1
设置/读取夹爪顺时针可运行误差
设置
指令:FE FE 08 0E 06 00 17 00 01 76 BD
功能码:06 写操作
参数:参数 00 01,设置值为 1,设置范围(0-16)
返回:FE FE 08 0E 06 00 17 00 01 76 BD
标注:成功返回 00 01,失败返回 00 00
读取
指令:FE FE 08 0E 03 00 18 00 00 B5 80
功能码:03 读操作
参数:无
返回:FE FE 08 0E 03 00 18 00 01 75 41
标注:返回数据 00 01,表示当前值为 1
设置/读取夹爪最小启动力
设置
指令:FE FE 08 0E 06 00 19 00 18 7F 1D
功能码: 06 写操作
参数:00 18
返回:FE FE 08 0E 06 00 19 00 01 B5 DC
标注:成功返回 00 01,失败返回 00 00
读取
指令:FE FE 08 0E 03 00 1A 00 00 75 21
功能码:03 读操作
参数:无
返回:FE FE 08 0E 03 00 1A 00 18 7F 21
标注:返回数据 00 18,表示当前值为 24
设置/读取扭矩
设置
指令:FE FE 08 0E 06 00 1B 00 64 F8 BC
功能码: 06 写操作
参数:00 64 设置扭力为 100,参数范围(0-100)
返回:FE FE 08 0E 06 00 1B 00 01 75 7D
标注:成功返回 00 01,失败返回 00 00
读取
指令:FE FE 08 0E 03 00 1C 00 00 74 C1
功能码:03 读操作
参数:无
返回:FE FE 08 0E 03 00 1C 01 2C 39 C1
标注:返回数据 01 2C,表示当前值为 300,扭力越大电流也会增大,夹爪力度 也会增大
io 输出设置
指令:FE FE 08 0E 06 00 1D 00 10 78 5D
功能码:06 写操作
参数:00 10 设置 IO 输出为 10,参数范围(00,01,10,11)
返回:FE FE 08 0E 06 00 1D 00 01 74 9D
标注:成功返回 00 01,失败返回 00 00
设置 io 张开角度
设置
指令:FE FE 08 0E 06 00 1E 00 32 61 2D
功能码: 06 写操作
参数:00 32 设置 IO 张开角度为 50,参数范围(0-100)
返回:FE FE 08 0E 06 00 1E 00 01 74 6D
标注:成功返回 00 01,失败返回 00 00
读取 指令:FE FE 08 0E 03 00 22 00 00 B8 A0
功能码:03 读操作
参数:无
返回:FE FE 08 0E 03 00 22 00 32 6D 21
标注:00 32 数据返回为 50 度
设置 io 闭合角度
设置 指令:FE FE 08 0E 06 00 1F 00 00 74 FD
功能码: 06 写操作
参数:00 32 设置 IO 闭合角度为 0,参数范围(0-100)
返回:FE FE 08 0E 06 00 1F 00 01 B4 3C
标注:成功返回 00 01,失败返回 00 00
读取
指令:FE FE 08 0E 03 00 23 00 00 78 F1
功能码:03 读操作
参数:无
返回:FE FE 08 0E 03 00 23 00 00 78 F1
标注:00 00 数据返回为 0 度
设置/读取夹爪速度
设置
指令:FE FE 08 0E 06 00 20 00 32 AD 4C
功能码: 06 写操作
参数:00 32 设置速度为 50,参数范围(1-100)
返回:FE FE 08 0E 06 00 20 00 01 B8 0C
标注:成功返回 00 01,失败返回 00 00
读取
指令:FE FE 08 0E 03 00 21 00 00 B8 50
功能码:03 读操作
参数:无
返回:FE FE 08 0E 03 00 21 00 32 6D D1
标注:00 32 数据返回为 50
设置绝对角度
指令:FE FE 08 0E 06 00 24 00 64 52 8D
功能码: 06 写操作
参数:00 64 设置绝对角度为 100,参数范围(0-100)
返回:FE FE 08 0E 06 00 24 00 01 79 4D
标注:成功返回 00 01,失败返回 00 00
由于响应时间长,用户一直发送这个指令将会被放入队列中逐条指令执行, 绝对角度会等待夹爪运动到指定位置后才返回指令,如果运动过程中有物体阻 碍运动使得夹爪无法运动到指定位置等待超时后返回失败指令
暂停运动
指令:FE FE 08 0E 06 00 25 00 00 79 DD
功能码: 06 写操作
参数:无
返回:FE FE 08 0E 06 00 25 00 01 B9 1C
标注:成功返回 00 01,失败返回 00 00
暂停运动作用于设置绝对角度,发送该指令后将不会从队列中执行绝对角度 指令
恢复运动
指令:FE FE 08 0E 06 00 26 00 00 79 2D
功能码: 06 写操作
参数:无
返回:FE FE 08 0E 06 00 26 00 01 B9 EC
标注:成功返回 00 01,失败返回 00 00
恢复运动作用于设置绝对角度,该指令可以恢复绝对角度队列执行
停止运动
指令:FE FE 08 0E 06 00 27 00 00 B9 7C
功能码: 06 写操作
参数:无
返回:FE FE 08 0E 06 00 27 00 01 79 BD
标注:成功返回 00 01,失败返回 00 00
停止运动作用于绝对角度,该指令会清除绝对指令队列
获取当前队列的数据量
指令:FE FE 08 0E 03 00 28 00 00 BA 80
功能码:03 读操作
参数:无
返回:FE FE 08 0E 03 00 28 00 00 BA 80
标注:00 00,表示绝对角度队列中的指令个数为 0
该指令作用于设置绝对角度,该指令可以获取绝对角度队列中的指令个数
设置舵机虚位数值
设置
指令:FE FE 08 0E 06 00 29 00 08 BC 1C
功能码: 06 写操作
参数:00 08 设置夹爪位置误差范围,参数范围(0-254)
返回:FE FE 08 0E 06 00 29 00 01 BA DC
标注:成功返回 00 01,失败返回 00 00
读取
指令:FE FE 08 0E 03 00 2A 00 00 7A 21
功能码:03 读操作
参数:无
返回:FE FE 08 0E 03 00 2A 00 08 BC 20
标注:00 08 数据返回 8
默认数值为 8,虚位设置越大,夹爪位置判定精准度也会相应降低
设置/读取夹持电流
设置
指令:FE FE 08 0E 06 00 2B 00 FE 3A 3D
功能码: 06 写操作
参数:00 FE 设置夹持电流为 254,参数范围(0-254)
返回:FE FE 08 0E 06 00 2B 00 01 7A 7D
标注:成功返回 00 01,失败返回 00 00
读取
指令:FE FE 08 0E 03 00 2C 00 00 7B C1
功能码:03 读操作
参数:无
返回:FE FE 08 0E 03 00 2C 00 FE FB 40
标注:00 FE 数据返回 254,设置扭矩时夹持物体电流会随之适配,这条指令可 以自行设置夹持电流
python USB转485模块控制
驱动库安装
在电脑终端执行下面命令,安装依赖库
pip install pyserial
API说明
get_firmware_version()
- 功能: 获取夹爪固件主版本号
- 参数: 无
- 返回:
(int)固件主版本号
get_modified_version()
- 功能: 获取夹爪固件次版本号
- 参数: 无
- 返回:
(int)固件次版本号
get_gripper_Id()
- 功能: 获取夹爪ID
- 参数: 无
- 返回:
(int)夹爪ID
get_gripper_baud()
- 功能: 获取夹爪波特率
- 参数: 无
- 返回:
(int)0-50: 1152001: 10000002: 576003: 192004: 96005: 4800
get_gripper_value()
- 功能: 获取夹爪的当前位置数据信息
- 参数: 无
- 返回:
(int)夹爪的当前位置数据
get_gripper_status()
- 功能: 获取夹爪的当前状态
- 参数: 无
- 返回:
(int)0-30: 正在运动1: 停止运动,未检测到夹到物体2: 停止运动,检测到夹到了物体3: 检测到夹到物体以后,物体掉落
get_gripper_speed()
- 功能: 获取夹爪的当前速度
- 参数: 无
- 返回:
(int)夹爪的当前速度
get_gripper_P()
- 功能: 获取夹爪PID的P值
- 参数: 无
- 返回:
(int)夹爪PID的P值
get_gripper_I()
- 功能: 获取夹爪PID的I值
- 参数: 无
- 返回:
(int)夹爪PID的I值
get_gripper_D()
- 功能: 获取夹爪PID的D值
- 参数: 无
- 返回:
(int)夹爪PID的D值
get_gripper_cw()
- 功能: 获取夹爪顺时针可运行误差
- 参数: 无
- 返回:
(int)夹爪顺时针可运行误差
get_gripper_cww()
- 功能: 获取夹爪逆时针可运行误差
- 参数: 无
- 返回:
(int)夹爪逆时针可运行误差
get_gripper_mini_pressure()
- 功能: 获取夹爪最小启动力
- 参数: 无
- 返回:
(int)夹爪最小启动力
get_gripper_io_open_value()
- 功能: 获取夹爪Io张开角度
- 参数: 无
- 返回:
(int)夹爪Io张开角度
get_gripper_io_close_value()
- 功能: 获取夹爪Io闭合角度
- 参数: 无
- 返回:
(int)获取夹爪Io闭合角度
get_gripper_queue_count()
- 功能: 获取夹爪当前队列的数据量
- 参数: 无
- 返回:
(int)夹爪当前队列的数据量
get_gripper_vir_pos()
- 功能: 获取夹爪舵机虚位数值
- 参数: 无
- 返回:
(int)夹爪舵机虚位数值
get_gripper_protection_current()
- 功能: 获取夹爪夹持电流
- 参数: 无
- 返回:
(int)夹爪夹持电流
set_gripper_Id(value)
- 功能: 设置夹爪ID号
- 参数:
value:(int)夹爪ID,取值范围1-254
- 返回:
(int)0-10: 失败1: 成功
set_gripper_baud(value)
- 功能: 设置夹爪波特率
- 参数:
value:(int)夹爪波特率,取值范围0-50: 1152001: 10000002: 576003: 192004: 96005: 4800
- 返回:
(int)0-10: 失败1: 成功
set_gripper_enable(value)
- 功能: 设置夹爪使能状态
- 参数:
value:(int)使能状态,取值范围0-10: 掉使能1: 上使能
- 返回:
(int)0-10: 失败1: 成功
set_gripper_value(value,speed)
- 功能: 设置夹爪以指定的速度转动到指定的位置
- 参数:
value:(int)位置,取值范围0-100speed:(int)速度,取值范围1-100
- 返回:
(int)0-10: 失败1: 成功
set_gripper_calibration()
- 功能: 设置夹爪零位校准
- 参数: 无
- 返回:
(int)0-10: 失败1: 成功
set_gripper_P(value)
- 功能: 设置夹爪PID的P值
- 参数:
value:(int)P值,取值范围0-254
- 返回:
(int)0-10: 失败1: 成功
set_gripper_I(value)
- 功能: 设置夹爪PID的I值
- 参数:
value:(int)I值,取值范围0-254
- 返回:
(int)0-10: 失败1: 成功
set_gripper_D(value)
- 功能: 设置夹爪PID的D值
- 参数:
value:(int)D值,取值范围0-254
- 返回:
(int)0-10: 失败1: 成功
set_gripper_cw(value)
- 功能: 设置夹爪顺时针可运行误差
- 参数:
value:(int)误差,取值范围0-16
- 返回:
(int)0-10: 失败1: 成功
set_gripper_cww(value)
- 功能: 设置夹爪逆时针可运行误差
- 参数:
value:(int)误差,取值范围0-16
- 返回:
(int)0-10: 失败1: 成功
set_gripper_mini_pressure(value)
- 功能: 设置夹爪最小启动力
- 参数:
value:(int)最小启动力,取值范围0-254
- 返回:
(int)0-10: 失败1: 成功
set_gripper_torque(value)
- 功能: 设置夹爪扭矩
- 参数:
value:(int)扭矩,取值范围0-300
- 返回:
(int)0-10: 失败1: 成功
set_gripper_output(value)
- 功能: 设置夹爪IO
参数:
value:(int)夹爪IO,取值范围0-30: out1 off,out2 off1: out1 on,out2 off2: out1 off,out2 on3: out1 on,out2 on
返回:
(int)0-10: 失败1: 成功
set_gripper_io_open_value(value)
- 功能: 设置夹爪Io张开位置
- 参数:
value:(int)位置,取值范围0-100
- 返回:
(int)0-10: 失败1: 成功
set_gripper_io_close_value(value)
- 功能: 设置夹爪Io闭合位置
- 参数:
value:(int)位置,取值范围0-100
- 返回:
(int)0-10: 失败1: 成功
set_gripper_speed(speed)
- 功能: 设置夹爪速度
- 参数:
speed:(int)速度,取值范围1-100
- 返回:
(int)0-10: 失败1: 成功
set_abs_gripper_value(value,speed)
- 功能: 设置夹爪以指定的速度转动到指定的绝对位置
- 参数:
value:(int)位置,取值范围1-100speed:(int)速度,取值范围1-100
- 返回:
(int)0-10: 失败1: 成功
set_gripper_vir_pos(value)
- 功能: 设置夹爪舵机虚位数值
- 参数:
value:(int)虚位,取值范围0-100
- 返回:
(int)0-10: 失败1: 成功
set_gripper_protection_current(value)
- 功能: 设置夹爪夹持电流
- 参数:
value:(int)虚位,取值范围1-254
- 返回:
(int)0-10: 失败1: 成功
set_gripper_pause()
- 功能: 设置夹爪暂停运动
- 备注: 只对set_abs_gripper_value()生效
- 参数: 无
- 返回:
(int)0-10: 失败1: 成功
set_gripper_resume()
- 功能: 设置夹爪恢复运动
- 备注: 只对set_abs_gripper_value()生效
- 参数: 无
- 返回:
(int)0-10: 失败1: 成功
set_gripper_stop()
- 功能: 设置夹爪停止运动,并清空消息队列
- 备注: 只对set_abs_gripper_value()生效
- 参数: 无
- 返回:
(int)0-10: 失败1: 成功
案例程序
from elegripper import Gripper
import time
if __name__=="__main__":
g=Gripper("COM27",baudrate=115200,id=14)##填写实际的串口号和波特率和夹爪ID
print("夹爪的实际ID为:",g.get_gripper_Id())
print(g.set_gripper_value(100,100))
time.sleep(2)
print(g.set_gripper_value(0,100))
time.sleep(2)
ros 控制
使用环境
Linux Ubuntu20.04 ROS Noetic,具体环境搭建内容请查看 ROS环境搭建
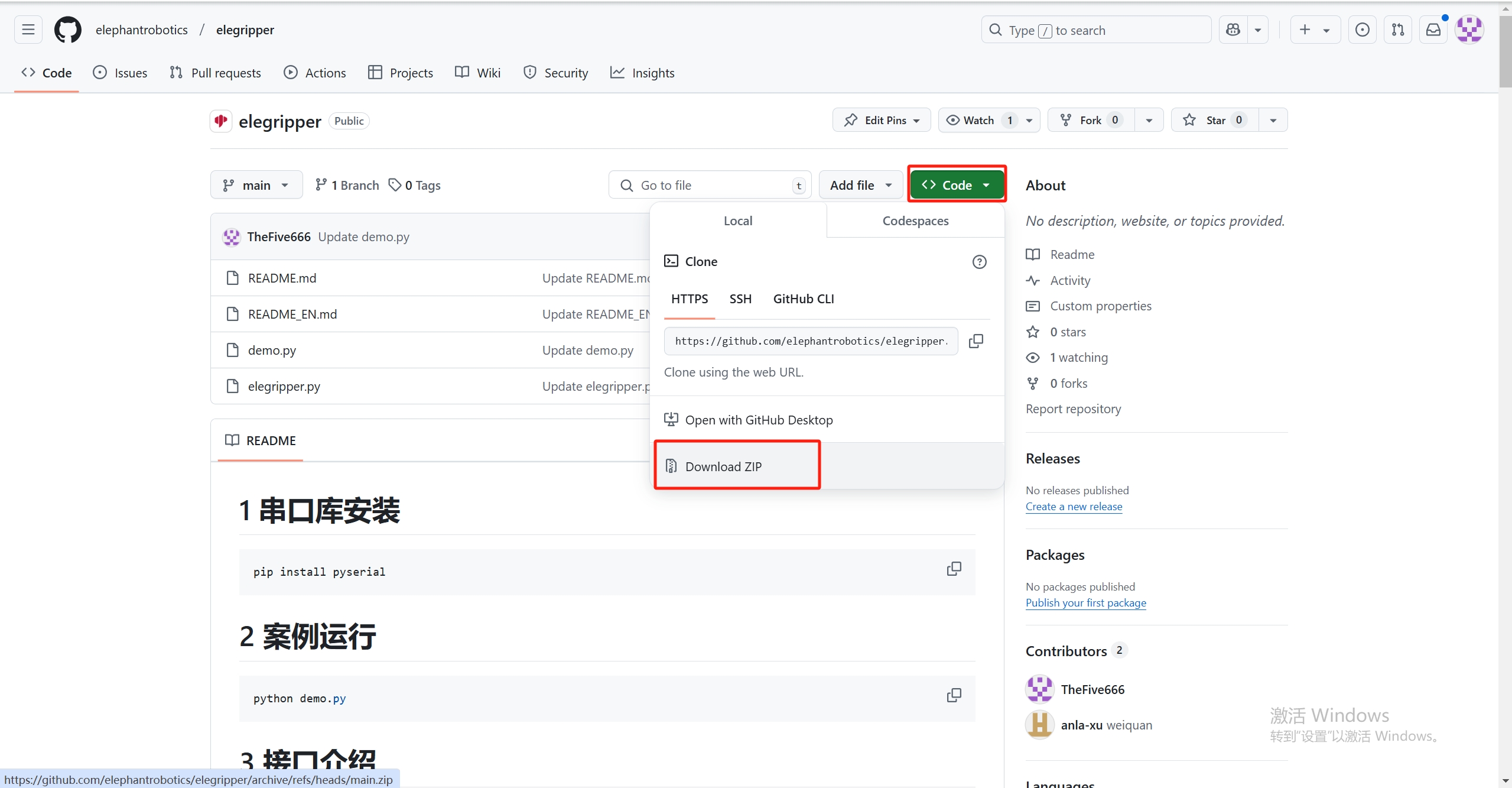
pro_gripper_ros 包安装
pro_gripper_ros 是 ElephantRobotics 推出的,适配旗下myGripper F100 力控夹爪的 ROS 包。
项目地址:http://github.com/elephantrobotics/pro_gripper_ros
注意: 在安装包之前,请保证拥有 ROS 工作空间,默认的 ROS 工作空间是 catkin_ws。
cd ~/catkin_ws/src # 进入工作区的src文件夹中
# 克隆github上的代码
git clone https://github.com/elephantrobotics/pro_gripper_ros.git
cd .. # 返回工作区
catkin_make # 构建工作区中的代码
cd ..
source devel/setup.bash # 添加环境变量
案例使用
打开终端命令行运行:
roslaunch pro_gripper_f100 force_gripper_slider.launch
打开 rviz 和一个滑块组件,您将看到如下界面:
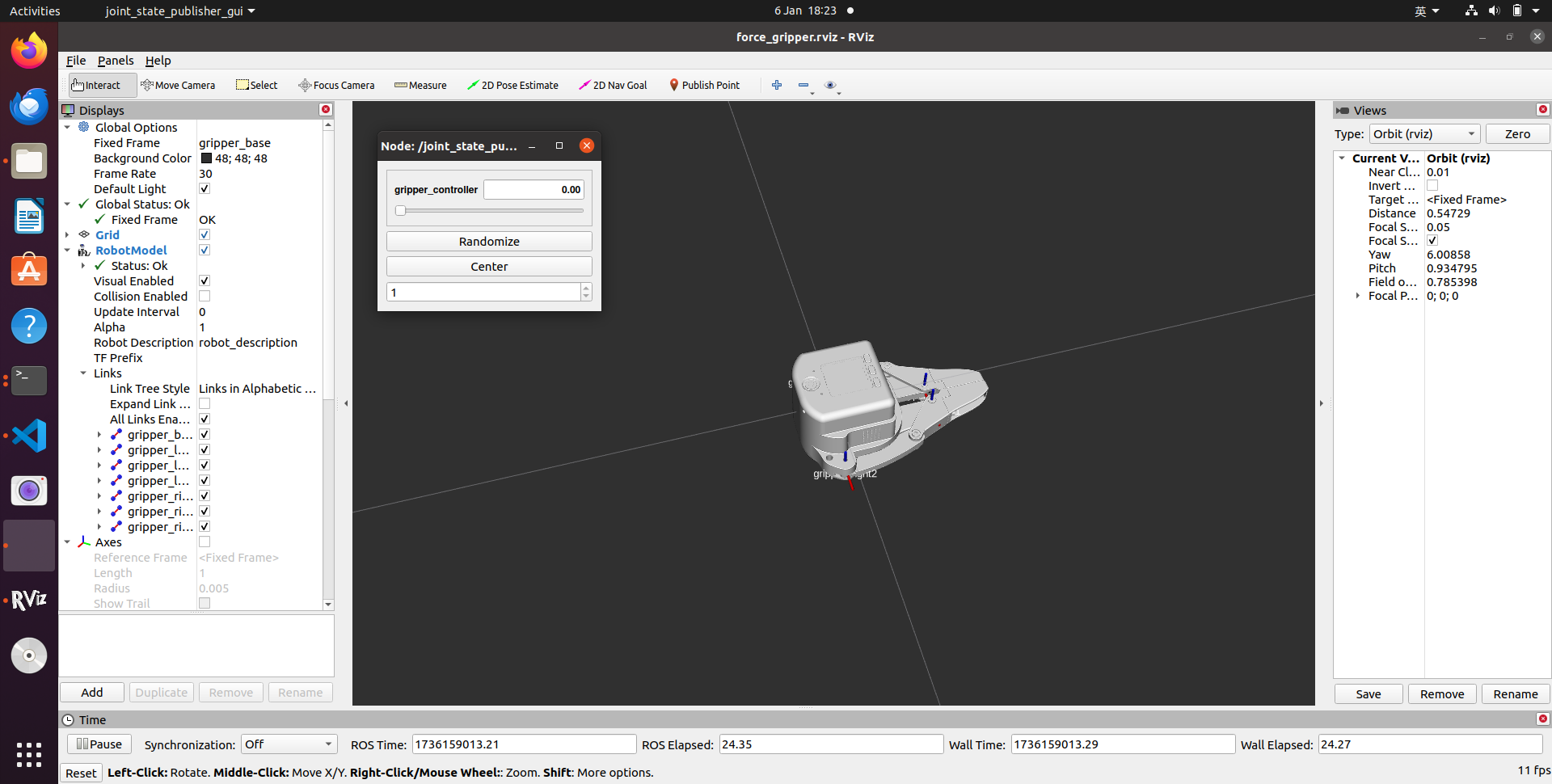
然后你就可以在 rviz 中 控制模型,通过拖动滑块使其打开或关闭。如果想让真实的夹爪随着模型打开或关闭,则需要打开另一个终端命令行并运行:
# 确保在运行之前授予串行端口权限, 默认串口为/dev/ttyACM0,波特率为115200, 可根据实际串口修改
rosrun pro_gripper_f100 force_gripper_slider.py _port:=/dev/ttyACM0 _baud:=115200
6 场景案例
mycobot320 力控夹爪使用案例,案例更多内容
C3 力控夹爪使用案例
myCobot pro630 力控夹爪使用案例

7 力控夹爪 ModBus-RTU 协议
目前力控夹爪的ModBus-RTU 协议仅支持03和06功能码,力控夹爪作为ModBus-RTU从站,且03功能码的读取的寄存器长度仅为1,03功能码代表读,06功能码代表写
读取保持寄存器(功能码 0x03)
读取夹爪张开角度为例
主站请求帧格式:
| 从站地址 | 功能码 | 寄存器地址(高位) | 寄存器地址(低位) | 寄存器数量(高位) | 寄存器数量(低位) | CRC16校验高位 | CRC16校验低位 |
|---|---|---|---|---|---|---|---|
| 0x0E | 0x03 | 0x00 | 0x0C | 0x00 | 0x01 | crc1 | crc2 |
从站应答帧格式: |从站地址 | 功能码 | 字节数 | 寄存器(高位) | 寄存器(低位) | CRC16校验高位 |CRC16校验低位| | -------- | ------ | -------- | -------------- | -------------- | ----- |----- | | 0x11 | 0x03 | 0x02 | 0x00 | 0x64 | crc1 | crc2|
设置保持寄存器(功能码 0x06)
设置夹爪张开角度为例 主站请求帧格式:
| 从站地址 | 功能码 | 起始寄存器(高位) | 起始寄存器(低位) | 数据内容(高位) | 数据内容(低位) | CRC16校验高位 | CRC16校验低位 |
|---|---|---|---|---|---|---|---|
| 0x0E | 0x06 | 0x00 | 0x0B | 0x00 | 0x64 | crc1 | crc2 |
从站应答帧格式:
| 从站地址 | 功能码 | 起始寄存器(高位) | 起始寄存器(低位) | 数据内容(高位) | 数据内容(低位) | CRC16校验高位 | CRC16校验低位 |
|---|---|---|---|---|---|---|---|
| 0x0E | 0x06 | 0x00 | 0x0B | 0x00 | 0x01 | crc1 | crc2 |
寄存器表
| 寄存器功能 | 寄存器地址 | 读/写权限 | 说明 |
|---|---|---|---|
| 读取固件主版本号 | 1 | 读 | 版本号*10返回,从1.0开始。例如1.0返回10 |
| 读取固件次版本号 | 2 | 读 | 0-255,每次主版本号不变的情况下,提交测试次版本号+1 |
| 设置设备ID号 | 3 | 写 | 1 - 254 |
| 读取设备ID号 | 4 | 读 | 返回ID |
| 设置485波特率 | 5 | 写 | 0 - 115200 (默认) 1 - 1000000 2 - 57600 3 - 19200 4 - 9600 5 - 4800 |
| 读取485波特率 | 6 | 读 | 0 - 115200 1 - 1000000 2 - 57600 3 - 19200 4 - 9600 5 - 4800 |
| 设置夹爪使能状态 | 10 | 写 | 0 - 掉使能 1 - 上使能 |
| 设置夹爪角度 | 11 | 写 | 角度值:0-100 |
| 读取夹爪角度 | 12 | 读 | 角度值:0-100 |
| 设置夹爪零位 | 13 | 写 | 0 - 失败 1 - 成功 |
| 读取夹爪夹持状态 | 14 | 读 | 0 - 正在运动 1 - 停止运动,未检测到夹到物体 2 - 停止运动,检测到夹到了物体 3 - 检测到夹到物体以后,物体掉落 |
| 设置夹爪P值 | 15 | 写 | 值范围0-254 |
| 读取夹爪P值 | 16 | 读 | 值范围0-254 |
| 设置夹爪D值 | 17 | 写 | 值范围0-254 |
| 读取夹爪D值 | 18 | 读 | 值范围0-254 |
| 设置夹爪I值 | 19 | 写 | 值范围0-254 |
| 读取夹爪I值 | 20 | 读 | 值范围0-254 |
| 设置夹爪顺时针可运行误差 | 21 | 写 | 值范围0-16 |
| 读取夹爪顺时针可运行误差 | 22 | 读 | 值范围0-150 |
| 设置夹爪逆时针可运行误差 | 23 | 写 | 值范围0-16 |
| 读取夹爪逆时针可运行误差 | 24 | 读 | 值范围0-150 |
| 设置夹爪最小启动力 | 25 | 写 | 值范围0-254 |
| 读取夹爪最小启动力 | 26 | 读 | 值范围0-150 |
| 设置扭矩 | 27 | 写 | 值范围0-100 |
| 读取扭矩 | 28 | 读 | 值范围100-300 |
| io输出设置 | 29 | 写 | 值范围 :0,1,16,17 |
| 设置io张开角度 | 30 | 写 | 角度值:0-100 |
| 读取io张开角度 | 31 | 写 | 角度值:0-100 |
| 设置夹爪速度 | 32 | 写 | 速度:1-100 |
| 读取夹爪默认速度 | 33 | 写 | 速度:1-100 |
| 读取Io张开角度 | 34 | 写 | 角度值:0-100 |
| 读取Io闭合角度 | 35 | 写 | 角度值:0-100 |
| 设置绝对角度 | 36 | 写 | 角度值:0-100 |
| 暂停运动 | 37 | 写 | 值:0 |
| 恢复运动 | 38 | 写 | 值:0 |
| 停止运动 | 39 | 写 | 值:0 |
| 获取当前队列的数据量 | 40 | 读 | 返回当前绝对控制队列中的数据量 |
| 设置舵机虚位数值 | 41 | 写 | 值:0-100 |
| 读取舵机虚位数值 | 42 | 读 | 值:0-100 |
| 设置夹持电流 | 43 | 读 | 值:100-300 |
| 读取夹持电流 | 44 | 读 | 值:1-300 |