myCobot Pro 力控夹爪
1 产品图片

2 规格参数说明
| 名称 | myCobot Pro 力控夹爪 |
|---|---|
| 材料 | PC、PBT |
| 尺寸 | 156X106X61mm |
| 工艺技术 | 注塑 |
| 夹取范围 | 0-100毫米(默认指尖) |
| 重复性精度 | 0.5 mm |
| 使用寿命 | 30万次开合 |
| 驱动模式 | 电驱动 |
| 传动方式 | 齿轮+连杆 |
| 尺寸 | 158x105x55mm |
| 重量 | 340 g |
| 额定负载 | 500g |
| 工作电压 | 24V |
| 固定方法 | 螺丝固定 |
| 使用环境要求 | 常温常压 |
| 控制接口 | RS485/IO 控制/按键控制 |
| 适用设备 | ER myCobot 320系列,ER Mercury系列,ER myCobot Pro 600,ERmyCobot Pro 630,其他通用机器人 |
3 工作原理
在电机的驱动下,机械手的手指表面做直线往复运动,实现打开或关闭动作。通过设置夹持力矩,使工件的冲击最小,定位点可控,夹紧可控。
4 使用场景
实验操作:在科研实验中,完成试管、器皿等的抓取和移动,确保实验的安全和准确性。 教育演示:作为教学工具,帮助学生理解机器人抓取原理,培养实践能力。 物料搬运:在模拟生产线或仓储中,搬运各种规格的物料,提高工作效率。
5 安装方式
用螺丝和垫片将夹爪连接件安装到机械臂末端法兰
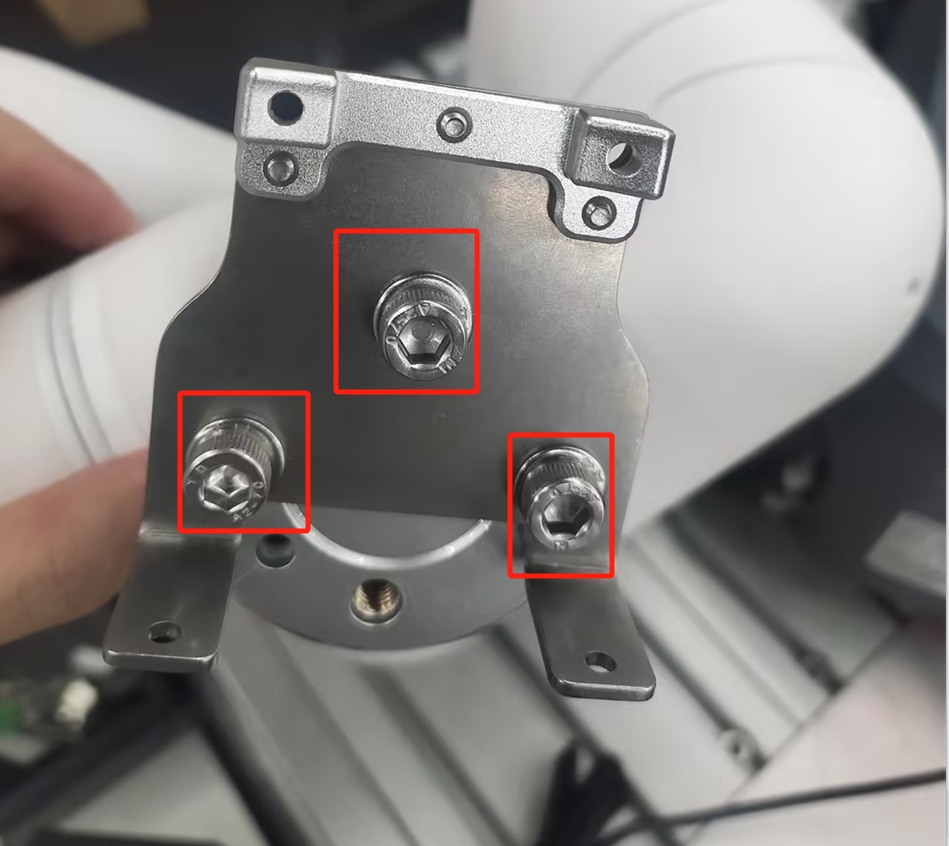
再用螺丝将夹爪安装在连接件上

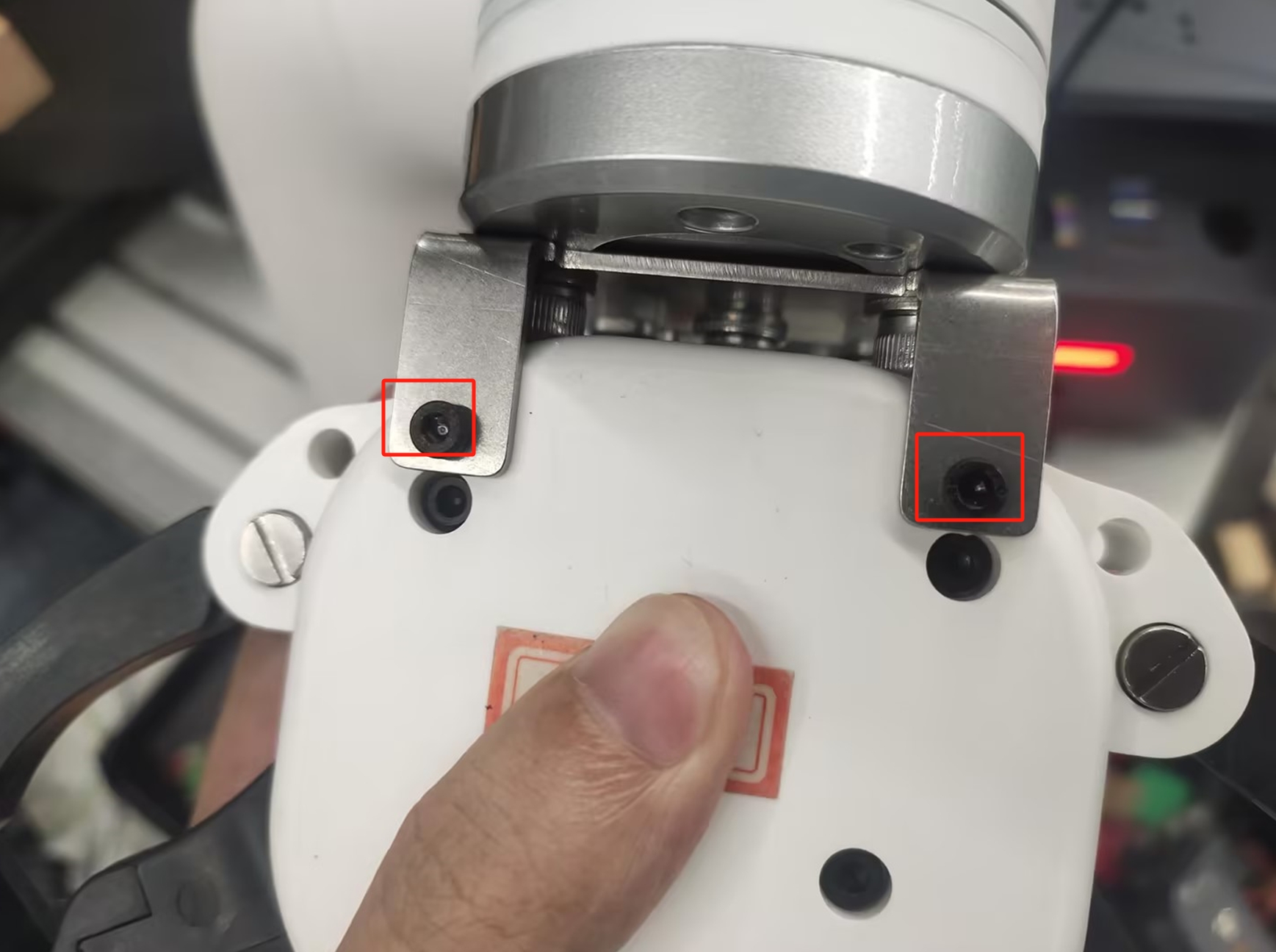
最后用M8航空线将夹爪和机械臂就行连接

6 python控制方式
机械臂需要烧录支持力控夹爪的pico固件,以及安装支持力控夹爪的pymycobot驱动库,但由于两者还在内测中,并未正式发布,如有需要,请联系售后人员获取
6.1 python控制方式API说明
注意事项:夹爪每条指令的调用的时间间隔要大于1.5秒。
set_pro_gripper(gripper_id, address, value)
- 功能:设置Pro力控夹爪参数,可以设置多种参数功能。具体请查看如下表格。
- 参数:
gripper_id(int): 夹爪ID,默认14,取值范围 1 ~ 254。address(int): 夹爪的指令序号。value:指令序号对应的参数值。
| 功能 | gripper_id | address | value |
|---|---|---|---|
| 设置夹爪ID | 14 | 3 | 1 ~ 254 |
| 设置夹爪使能状态 | 14 | 10 | 0或者1, 0 - 掉使能; 1 - 上使能 |
| 设置夹爪顺时针可运行误差 | 14 | 21 | 0 ~ 16 |
| 设置夹爪逆时针可运行误差 | 14 | 23 | 0 ~ 16 |
| 设置夹爪最小启动力 | 14 | 25 | 0 ~ 254 |
| IO输出设置 | 14 | 29 | 0, 1, 16, 17 |
| 设置IO张开角度 | 14 | 30 | 0 ~ 100 |
| 设置IO闭合角度 | 14 | 31 | 0 ~ 100 |
| 设置舵机虚位数值 | 14 | 41 | 0 ~ 100 |
| 设置夹持电流 | 14 | 43 | 1 ~ 254 |
- 返回值:
- 请查看如下表格:
| 功能 | 返回值 |
|---|---|
| 设置夹爪ID | 0 - 失败; 1 - 成功 |
| 设置夹爪使能状态 | 0 - 失败; 1 - 成功 |
| 设置夹爪顺时针可运行误差 | 0 - 失败; 1 - 成功 |
| 设置夹爪逆时针可运行误差 | 0 - 失败; 1 - 成功 |
| 设置夹爪最小启动力 | 0 - 失败; 1 - 成功 |
| IO输出设置 | 0 - 失败; 1 - 成功 |
| 设置IO张开角度 | 0 - 失败; 1 - 成功 |
| 设置IO闭合角度 | 0 - 失败; 1 - 成功 |
| 设置舵机虚位数值 | 0 - 失败; 1 - 成功 |
| 设置夹持电流 | 0 - 失败; 1 - 成功 |
get_pro_gripper(gripper_id, address)
- 功能:获取Pro力控夹爪参数,可以获取多种参数功能。具体请查看如下表格。
- 参数:
gripper_id(int): 夹爪ID,默认14,取值范围 1 ~ 254。address(int): 夹爪的指令序号。
| 功能 | gripper_id | address |
|---|---|---|
| 读取固件主版本号 | 14 | 1 |
| 读取固件次版本号 | 14 | 2 |
| 读取夹爪ID | 14 | 4 |
| 读取夹爪顺时针可运行误差 | 14 | 22 |
| 读取夹爪逆时针可运行误差 | 14 | 24 |
| 读取夹爪最小启动力 | 14 | 26 |
| 读取IO张开角度 | 14 | 34 |
| 读取IO闭合角度 | 14 | 35 |
| 获取当前队列的数据量 | 14 | 40 |
| 读取舵机虚位数值 | 14 | 42 |
| 读取夹持电流 | 14 | 44 |
- 返回值:
- 查看如下表格(若返回值为 -1,则表示读不到数据):
| 功能 | 返回值 |
|---|---|
| 读取固件主版本号 | 主版本号 |
| 读取固件次版本号 | 次版本号 |
| 读取夹爪ID | 1 ~ 254 |
| 读取夹爪顺时针可运行误差 | 0 ~ 254 |
| 读取夹爪逆时针可运行误差 | 0 ~ 254 |
| 读取夹爪最小启动力 | 0 ~ 254 |
| 读取IO张开角度 | 0 ~ 100 |
| 读取IO闭合角度 | 0 ~ 100 |
| 获取当前队列的数据量 | 返回当前绝对控制队列中的数据量 |
| 读取舵机虚位数值 | 0 ~ 100 |
| 读取夹持电流 | 1 ~ 254 |
set_pro_gripper_angle(gripper_id, gripper_angle)
- 功能:设置力控夹爪角度。
- 参数:
gripper_id(int): 夹爪ID,默认14,取值范围1 ~ 254。gripper_angle(int): 夹爪角度,取值范围 0 ~ 100。
- 返回值:
- 0 - 失败
- 1 - 成功
get_pro_gripper_angle(gripper_id)
- 功能:读取力控夹爪角度。
- 参数:
gripper_id(int): 夹爪ID,默认14,取值范围 1 ~ 254。
- 返回值:
int0 ~ 100
set_pro_gripper_open(gripper_id)
- 功能:打开力控夹爪。
- 参数:
gripper_id(int): 夹爪ID,默认14,取值范围 1 ~ 254。
- 返回值:
- 0 - 失败
- 1 - 成功
set_pro_gripper_close(gripper_id)
- 功能:关闭力控夹爪。
- 参数:
gripper_id(int): 夹爪ID,默认14,取值范围 1 ~ 254。
- 返回值:
- 0 - 失败
- 1 - 成功
set_pro_gripper_calibration(gripper_id)
- 功能:设置力控夹爪零位。(首次使用需要先设置零位)
- 参数:
gripper_id(int): 夹爪ID,默认14,取值范围 1 ~ 254。
- 返回值:
- 0 - 失败
- 1 - 成功
get_pro_gripper_status(gripper_id)
- 功能:读取力控夹爪夹持状态。
- 参数:
gripper_id(int): 夹爪ID,默认14,取值范围 1 ~ 254。
- 返回值:
0- 正在运动。1- 停止运动,未检测到夹到物体。2- 停止运动,检测到夹到物体。3- 检测到夹到物体之后,物体掉落。
set_pro_gripper_torque(gripper_id, torque_value)
- 功能:设置力控夹爪扭矩。
- 参数:
gripper_id(int): 夹爪ID,默认14,取值范围 1 ~ 254。torque_value(int) :扭矩值,取值范围 1 ~ 100。
- 返回值:
- 0 - 失败
- 1 - 成功
get_pro_gripper_torque(gripper_id)
- 功能:读取力控夹爪扭矩。
- 参数:
gripper_id(int): 夹爪ID,默认14,取值范围 1 ~ 254。
- 返回值: (
int) 100 ~ 300
set_pro_gripper_speed(gripper_id, speed)
- 功能:设置力控夹爪速度。
- 参数:
gripper_id(int): 夹爪ID,默认14,取值范围 1 ~ 254。speed(int): 夹爪运动速度,取值范围 1 ~ 100。
- 返回值:
- 0 - 失败
- 1 - 成功
get_pro_gripper_default_speed(gripper_id, speed)
- 功能:读取力控夹爪默认速度。
- 参数:
gripper_id(int): 夹爪ID,默认14,取值范围 1 ~ 254。
- 返回值:夹爪默认运动速度,范围 1 ~ 100。
set_pro_gripper_abs_angle(gripper_id, gripper_angle)
- 功能:设置力控夹爪绝对角度。
- 参数:
gripper_id(int): 夹爪ID,默认14,取值范围 1 ~ 254。gripper_angle(int): 夹爪角度,取值范围 0 ~ 100。
- 返回值:
- 0 - 失败
- 1 - 成功
set_pro_gripper_pause(gripper_id)
- 功能:暂停运动。
- 参数:
gripper_id(int) 夹爪ID,默认14,取值范围 1 ~ 254。
- 返回值:
- 0 - 失败
- 1 - 成功
set_pro_gripper_resume(gripper_id)
- 功能:运动恢复。
- 参数:
gripper_id(int) 夹爪ID,默认14,取值范围 1 ~ 254。
- 返回值:
- 0 - 失败
- 1 - 成功
set_pro_gripper_stop(gripper_id)
- 功能:停止运动。
- 参数:
gripper_id(int) 夹爪ID,默认14,取值范围 1 ~ 254。
- 返回值:
- 0 - 失败
- 1 - 成功
6.2 python 零位校准操作说明
将夹爪连接到机械臂末端后,运行下面的代码,夹爪会先张到最大,然后完全闭合,完成校准。
from pymycobot import MyCobot320
mc=MyCobot320("COM1")#填写机械臂的串口号
mc.set_pro_gripper_calibration(14)#夹爪的默认ID是14
6.3 python控制场景案例
demo1:力矩值适配
用户可通过观察对应力矩值设置前提下,力控夹爪夹住物体后的形变程度 选择一个形变最小,但可正常夹住物体的力矩值,此力矩值即为当前物体最合适力矩值
from pymycobot import MyCobot320
import time
mc=MyCobot320("COM1")#填写机械臂的串口号
mc.set_pro_gripper_torque(14,10)#设置力矩值
print(mc.get_pro_gripper_torque(14))#查看设置的力矩值
mc.set_pro_gripper_open(14)#夹爪完全张开
time.sleep(3)
mc.set_pro_gripper_close(14)#夹爪完全闭合
demo2:A-B点物体抓取移动
from pymycobot import MyCobot320
import time
mc=MyCobot320("COM1")#填写机械臂的串口号
mc.set_pro_gripper_torque(14,10)#设置夹爪的力矩值
print(mc.get_pro_gripper_torque(14))#打印设置完的夹爪力矩值
mc.set_pro_gripper_open(14)#先让夹爪完全打开
start_angles=[19.68, -1.23, -91.4, -0.52, 90.08, 60.29]
target_coords=[[231.3, -61.3, 232.7, 178.35, -2.7, -130.56],[231.3, 65.3, 232.7, 178.35, -2.7, -130.56]]
end_angles=[80,0,-85,0,90,60]
for i in range(len(target_coords)):
mc.sync_send_angles(start_angles,50)
mc.send_coords(target_coords[i],100,1)
time.sleep(2)
mc.send_coord(3,165,50)
time.sleep(2)
mc.set_pro_gripper_close(14)
time.sleep(2)
mc.send_coords(target_coords[i],100,1)
mc.sync_send_angles(end_angles,100)
mc.set_pro_gripper_open(14)
time.sleep(2)