Nav2
Next, we will introduce and use Nav2 navigation.
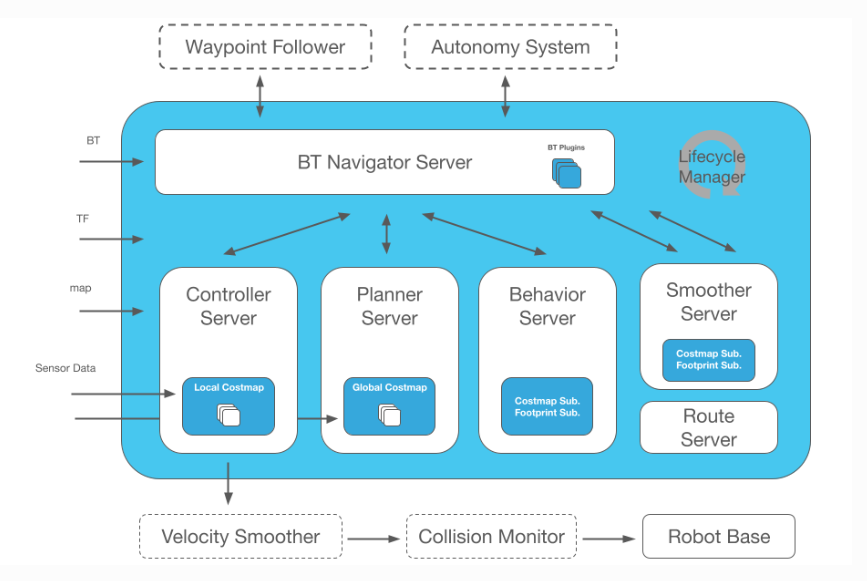
Nav2 is the successor to the ROS Navigation Stack, deploying the same type of technology that powers mobile and surface robotics. This project allows mobile robots to navigate in complex environments to complete user-defined application tasks using nearly any class of robot kinematics. Not only can it move from point A to point B, it can also have intermediate poses and represent other types of tasks such as object tracking, full coverage navigation, and more.
Start AGVPro underlying communication + laser radar
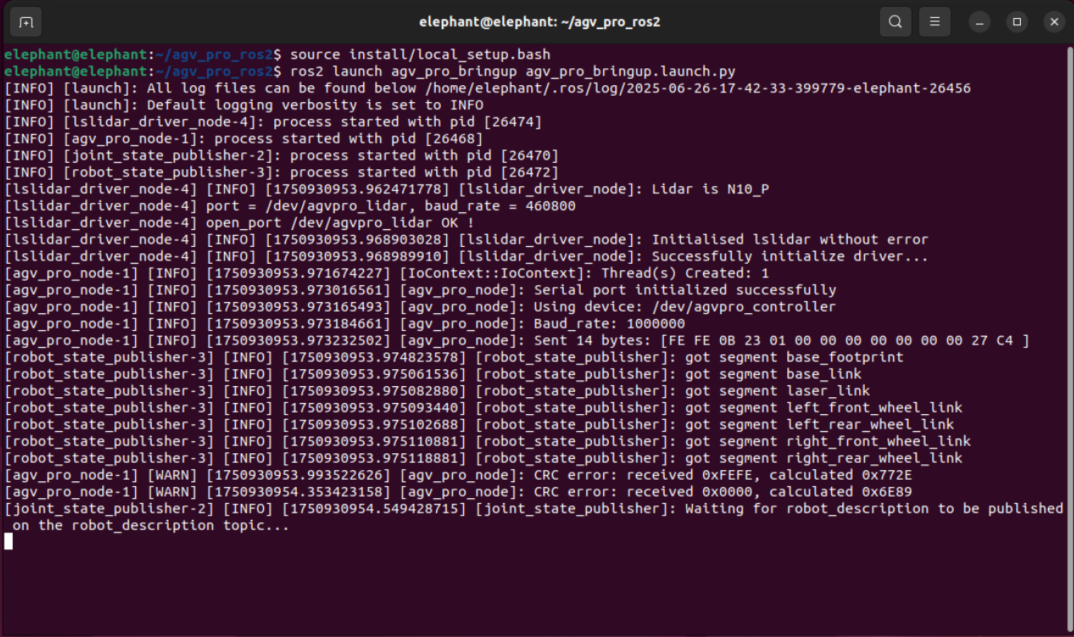
Press Ctrl+Alt+T on the keyboard, open the first terminal, and enter the command
ros2 launch agv_pro_bringup agv_pro_bringup.launch.py
Start Nav2
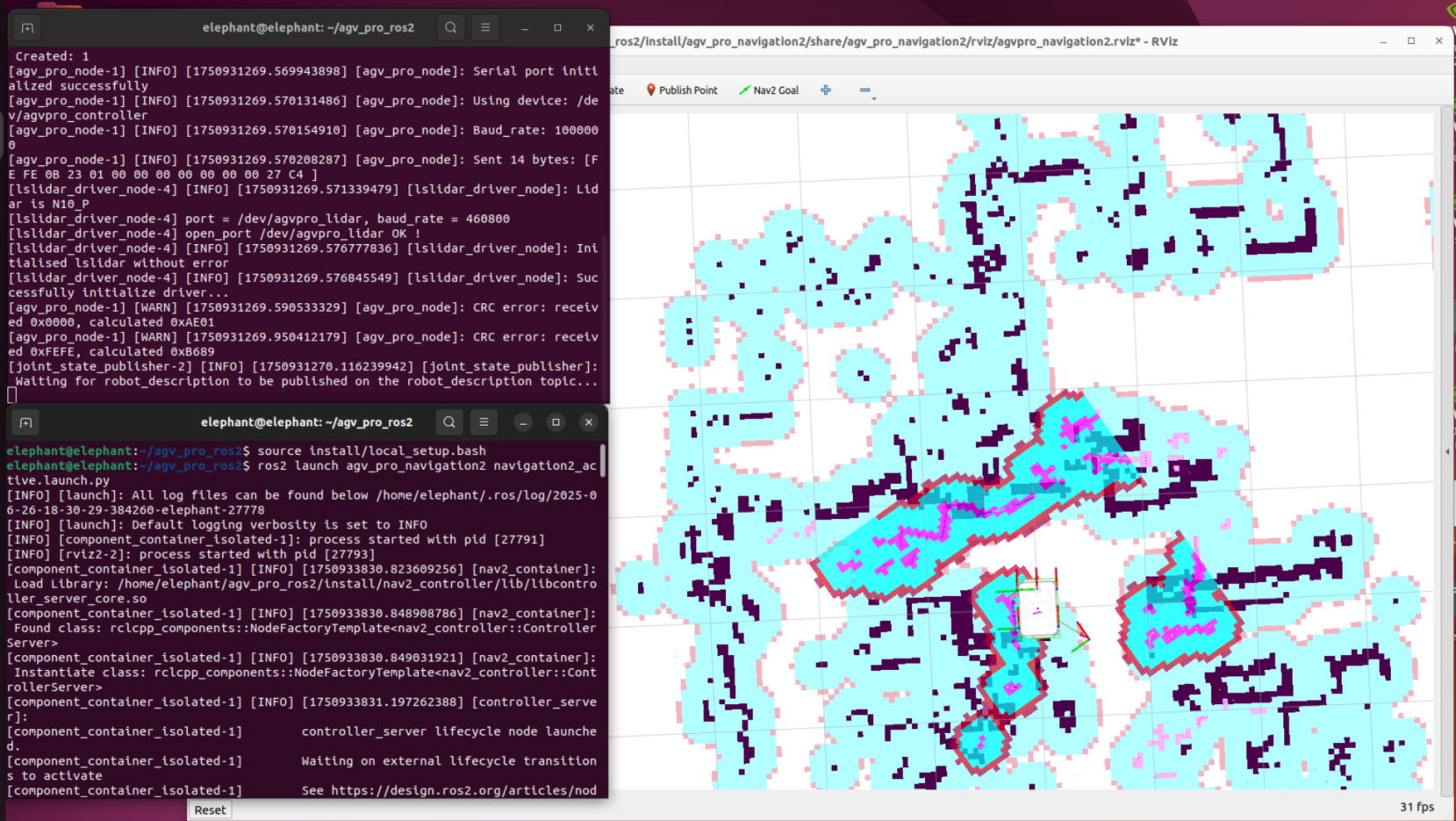
Press Ctrl+Alt+T on the keyboard to open a second terminal and enter the command:
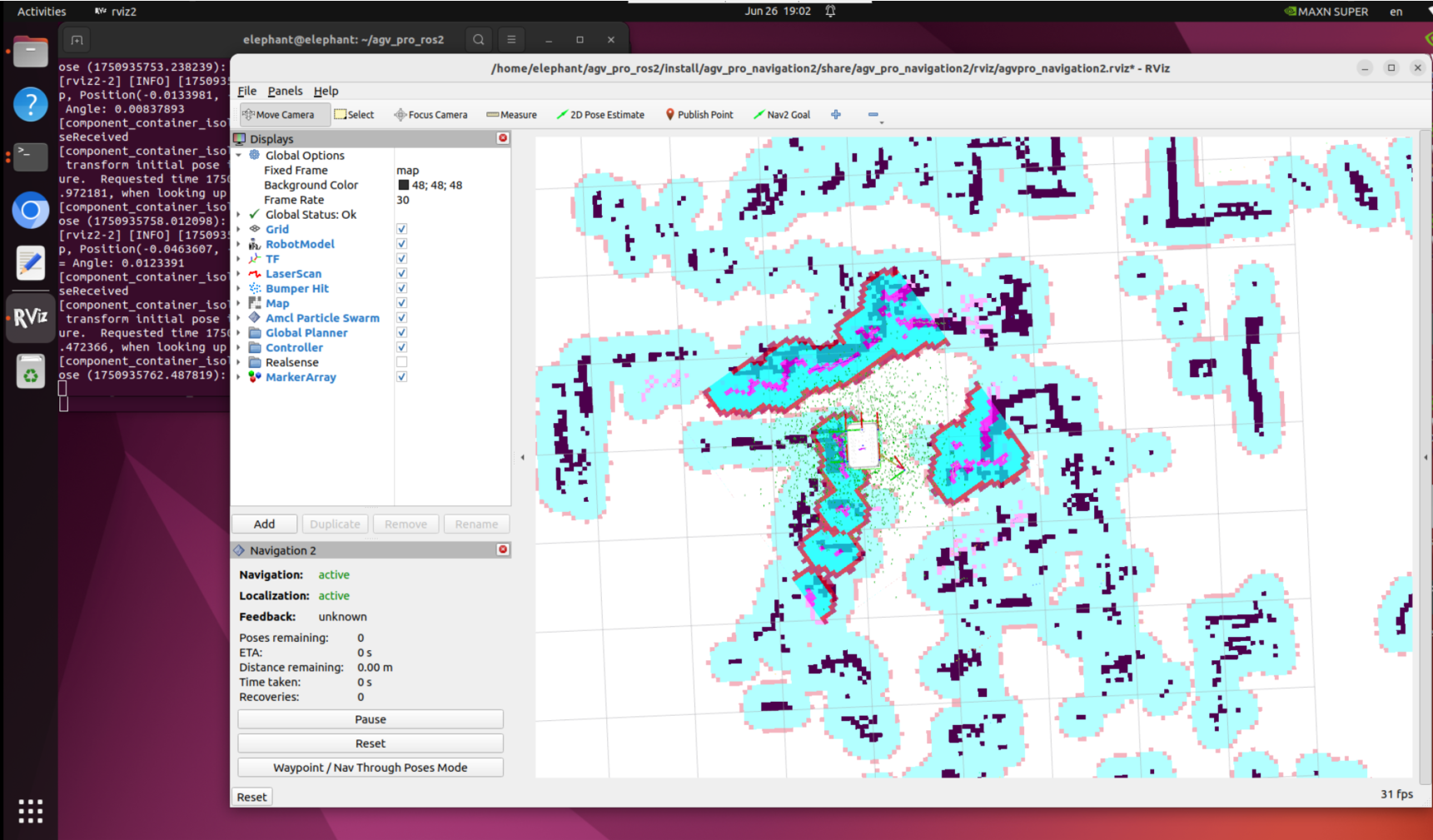
ros2 launch agv_pro_navigation2 navigation2_active.launch.py
This will start an rviz.
First, find the robot's position on the map. Check the position of your robot in the map.
Set the robot's pose in RViz. Click the 2D Pose Estimate button and indicate the robot's position on the map. The direction of the green arrow is the forward direction of the AGVPro.
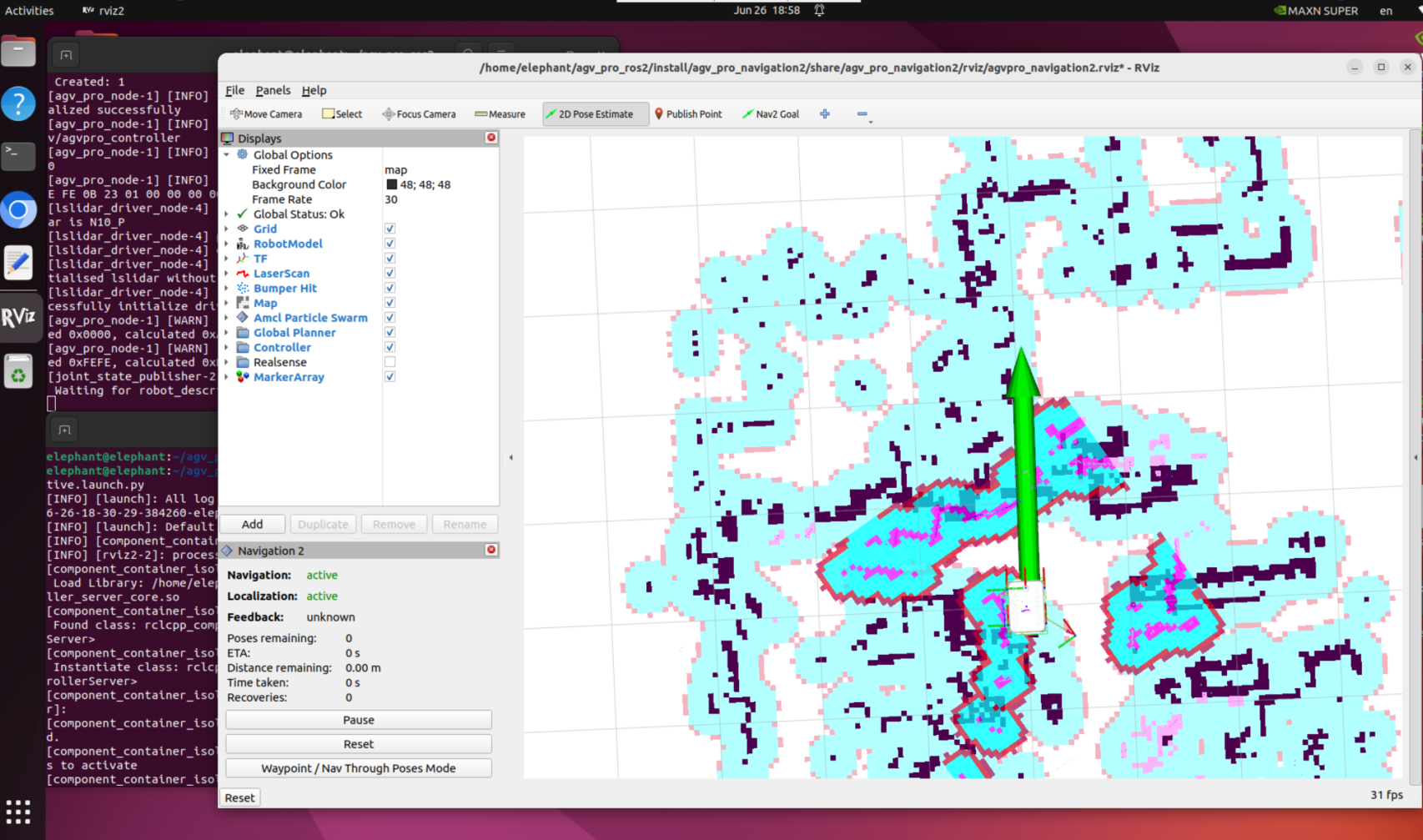
The 3D model is then moved to that location, and the lidar and map obstacles are observed to see if they match, and that small errors in the estimated position are tolerable.
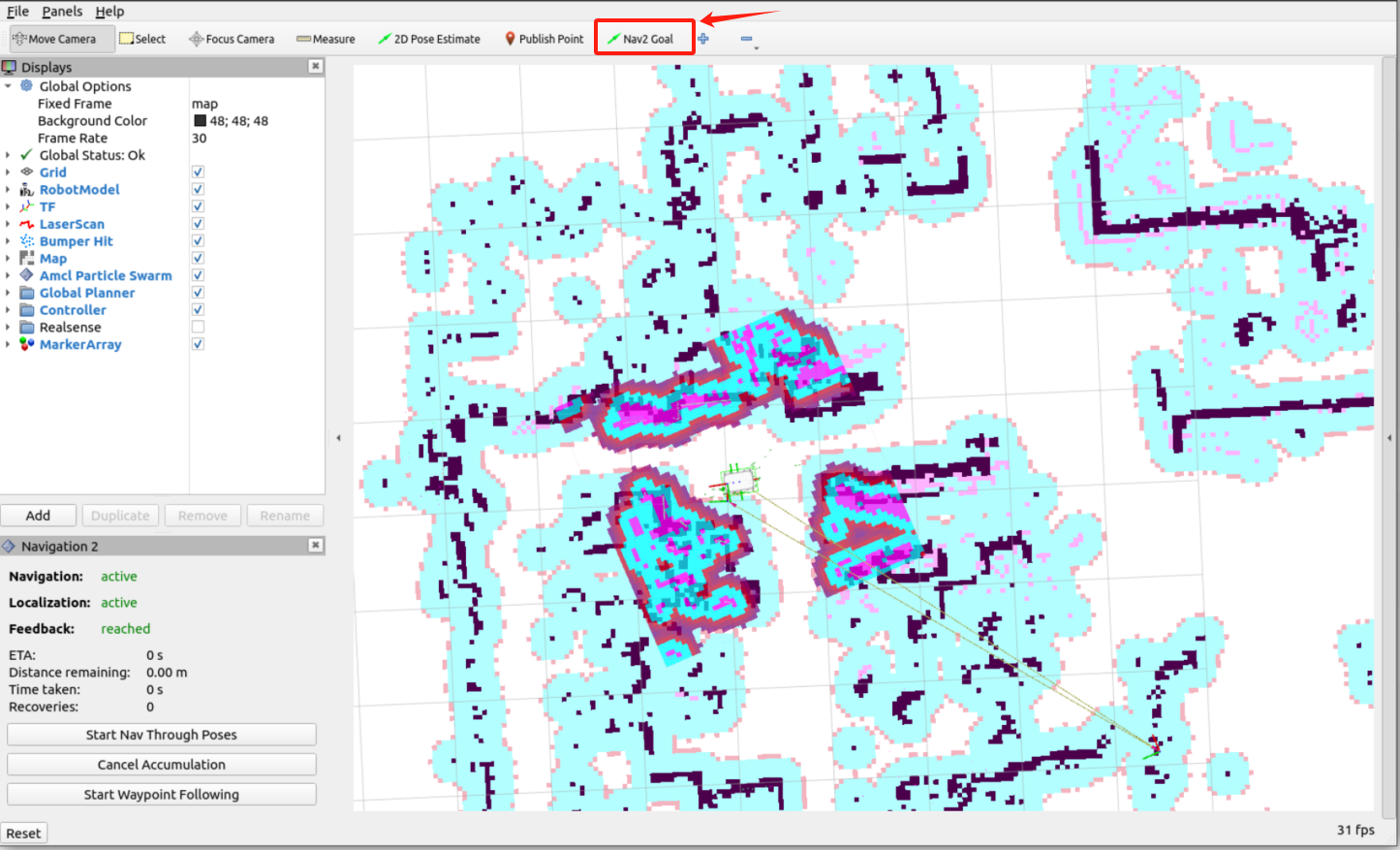
Select a target location on the map to navigate to. Use the Nav2 Goal button to send the target location and target direction.
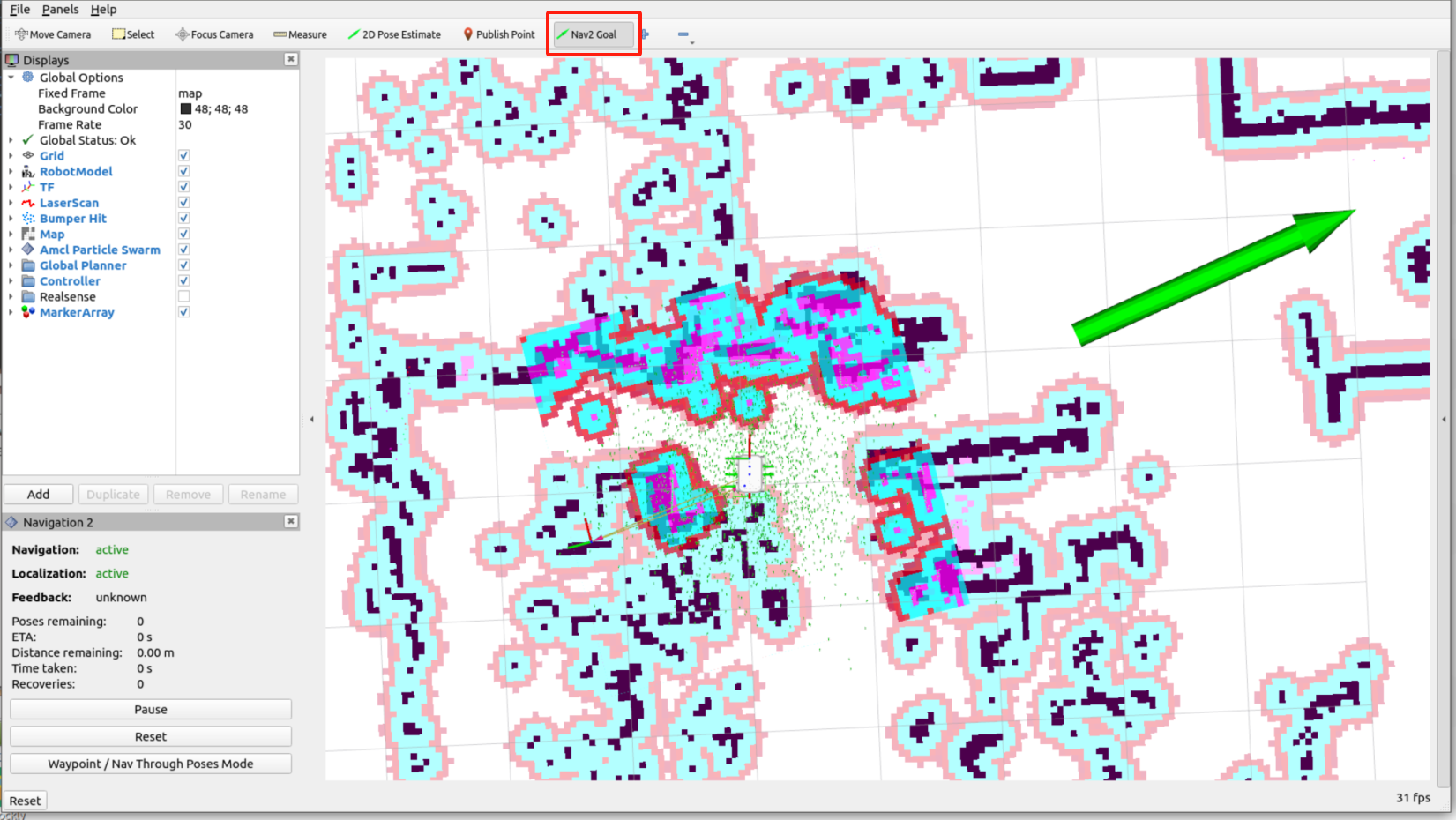
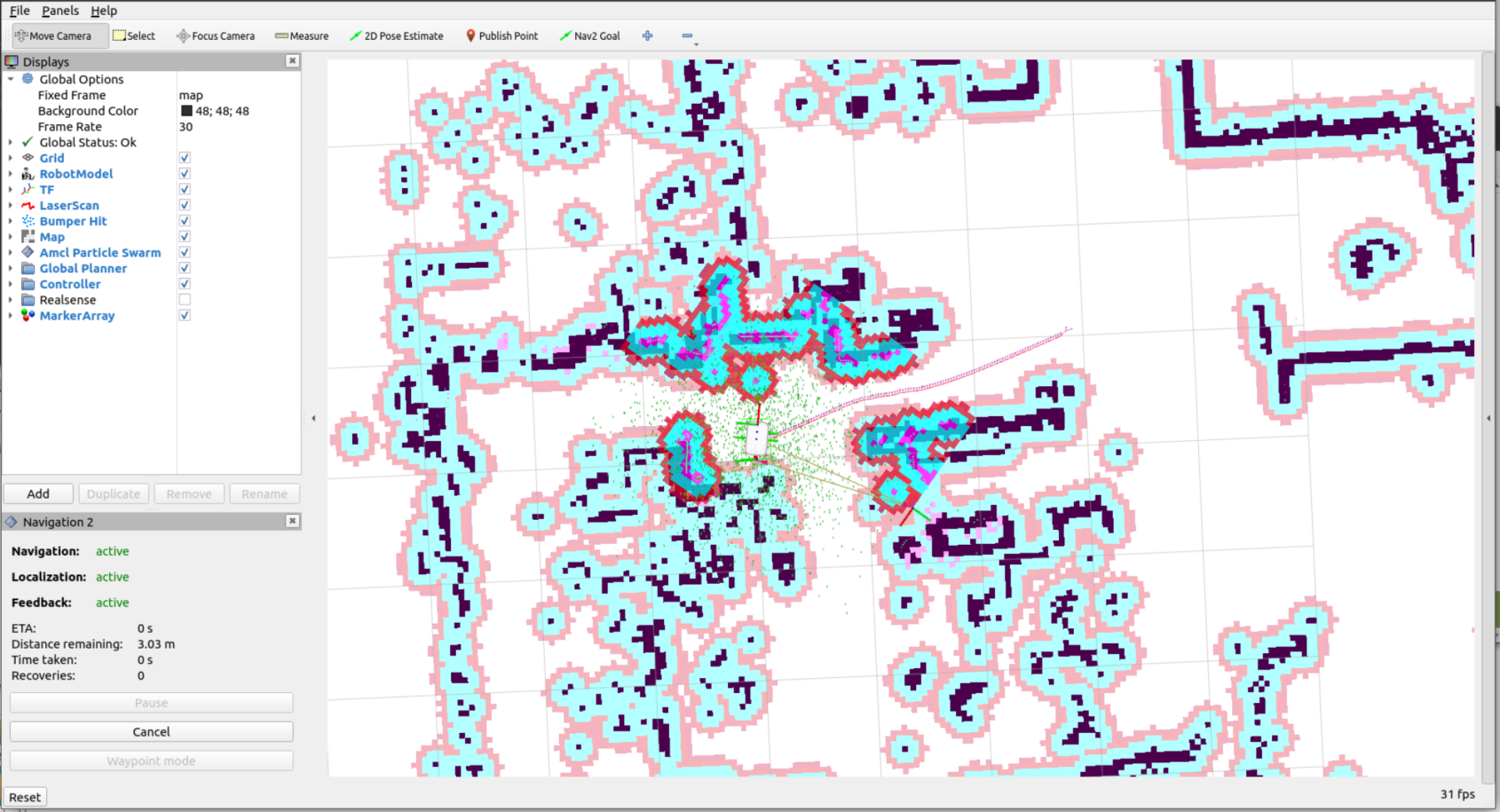
Nav2 will plan the path and send motion instructions to complete the navigation.
Waypoint Following
Click Waypoint/Nav Through Poses Mode in the lower left corner of rviz2 to switch to Waypoint Following Mode
Click Nav2 Goal to publish two navigation points
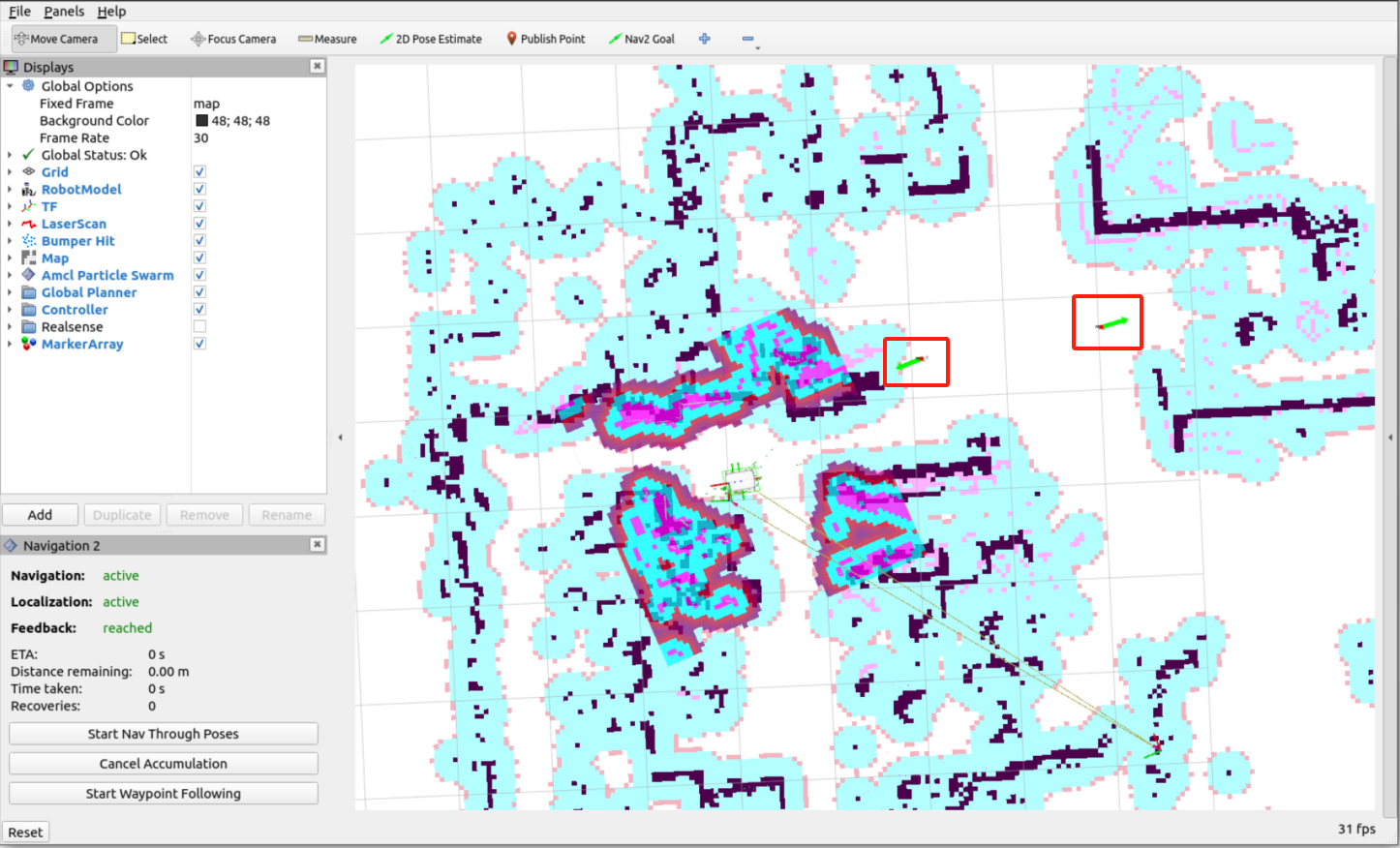
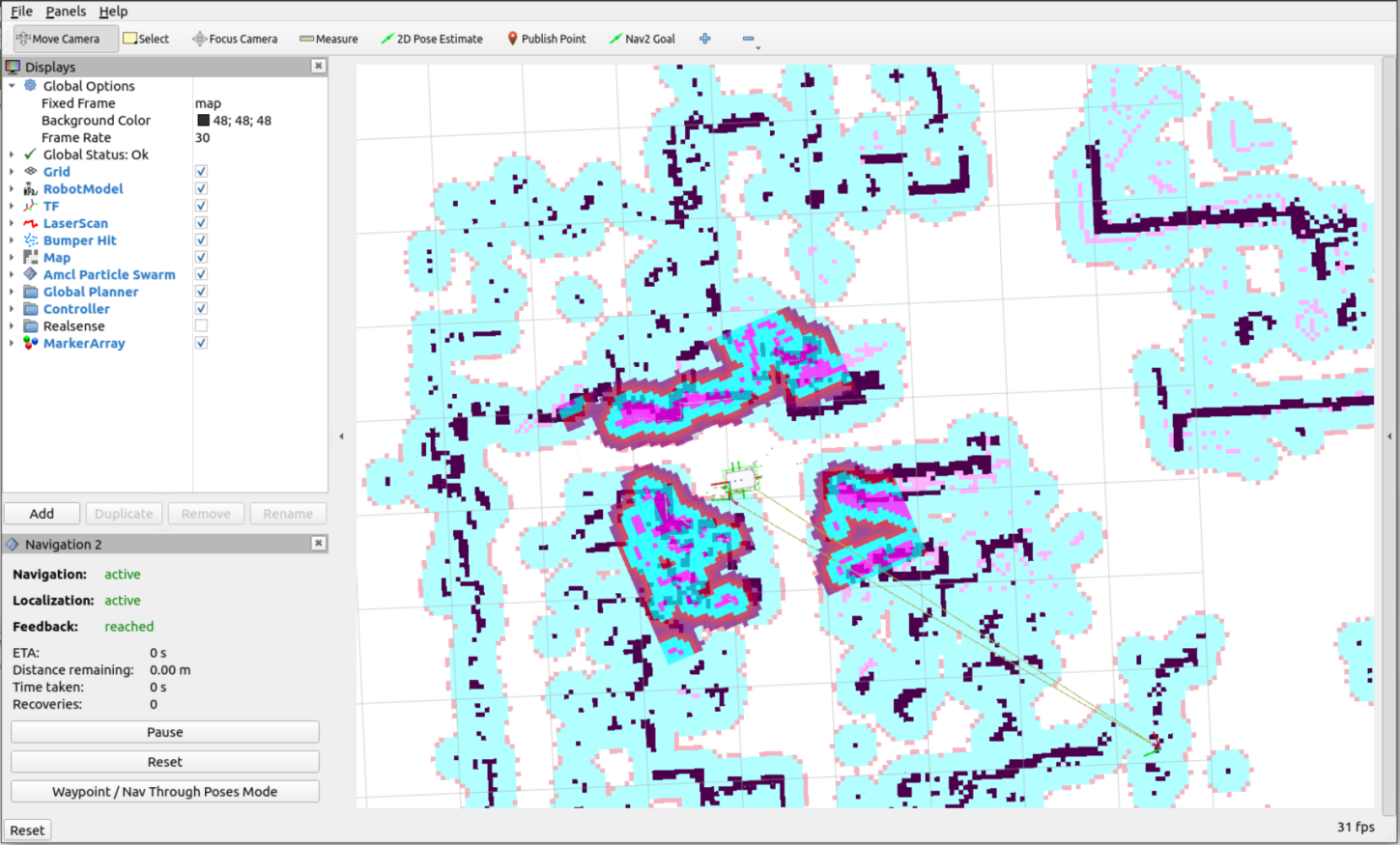
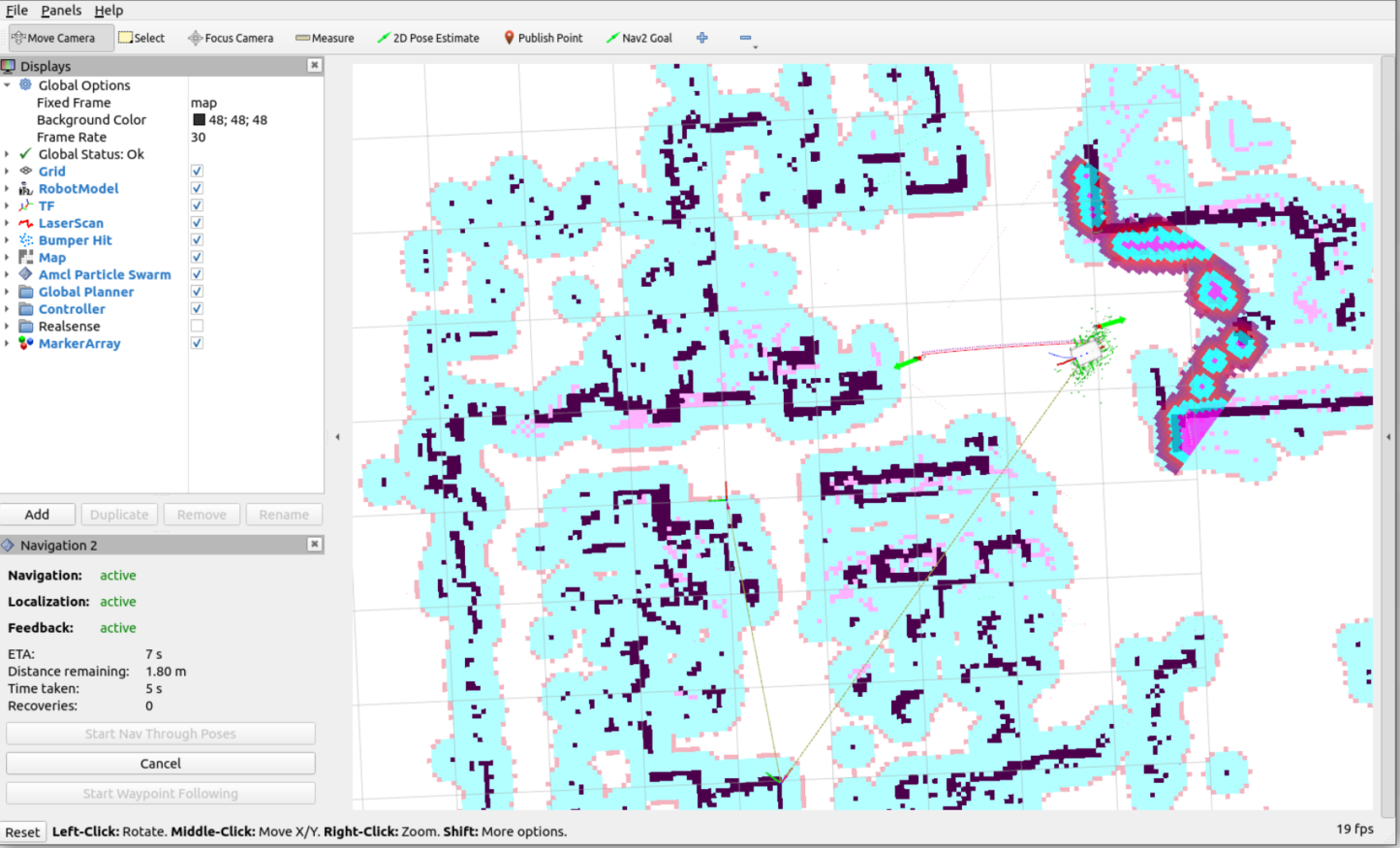
Click Start Waypoint Following in the lower left corner, and then navigation will proceed in sequence.
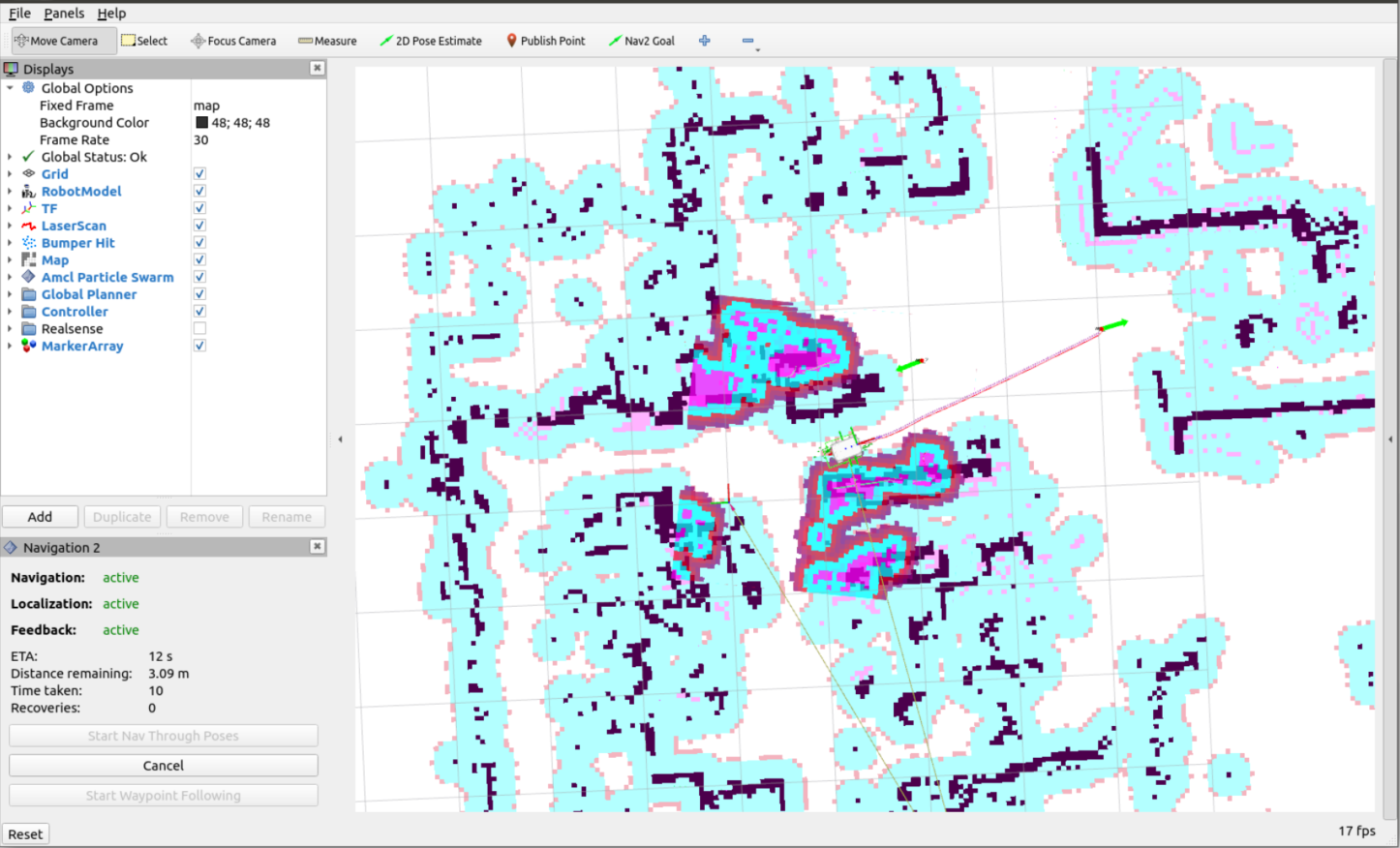
After navigating to the first point, continue navigating to the second point
Change the starting navigation map
In Chapter 6.2.2, we used the slam algorithm to create a spatial map and obtained a set of map files, namely map.pgm and map.yaml** in the ~/myagv_ros2/src/myagv_navigation2/map directory. We navigate based on these two map files. The following will introduce how nav2 loads other maps.
Method 1: Modify the launch.py file
Find the file agv_pro_ros2/agv_pro_navigation2/launch/navigation2_active.launch.py, change the 'map.yaml' on line 20 to the map file you need to load, and then compile it through colcon build.
import os
from ament_index_python.packages import get_package_share_directory
from launch import LaunchDescription
from launch.substitutions import LaunchConfiguration
from launch.actions import DeclareLaunchArgument,IncludeLaunchDescription
from launch.conditions import IfCondition
from launch.launch_description_sources import PythonLaunchDescriptionSource
from launch_ros.actions import Node
def generate_launch_description():
use_sim_time = LaunchConfiguration('use_sim_time', default='false')
use_rviz = LaunchConfiguration('use_rviz', default='true')
map_dir = LaunchConfiguration(
'map',
default=os.path.join(
get_package_share_directory('agv_pro_navigation2'),
'map',
'map.yaml'))
param_file_name = 'agvpro.yaml'
param_dir = LaunchConfiguration(
'params_file',
default=os.path.join(
get_package_share_directory('agv_pro_navigation2'),
'param',
param_file_name))
nav2_launch_file_dir = os.path.join(get_package_share_directory('nav2_bringup'), 'launch')
rviz_config_dir = os.path.join(
get_package_share_directory('agv_pro_navigation2'),
'rviz',
'agvpro_navigation2.rviz')
return LaunchDescription([
DeclareLaunchArgument(
'map',
default_value=map_dir,
description='Full path to map file to load'),
DeclareLaunchArgument(
'params_file',
default_value=param_dir,
description='Full path to param file to load'),
IncludeLaunchDescription(
PythonLaunchDescriptionSource([nav2_launch_file_dir, '/bringup_launch.py']),
launch_arguments={
'map': map_dir,
'params_file': param_dir}.items(),
),
Node(
package='rviz2',
executable='rviz2',
name='rviz2',
arguments=['-d', rviz_config_dir],
parameters=[{'use_sim_time': use_sim_time}],
condition=IfCondition(use_rviz),
output='screen'),
])
Method 2: Add the map parameter when launching launch
When launching ros2 launch agv_pro_navigation2 navigation2_active.launch.py, add the map:= parameter. For the writing of launch, you can refer to this link.
ros2 launch agv_pro_navigation2 navigation2_active.launch.py map:=~/agv_pro_ros2/src/agv_pro_navigation2/map/map_demo.yaml
nav2 performance tuning guide
The nav2 navigation framework provides a large number of adjustable parameters. The optimization focus of navigation parameters in different scenarios is different. Users can adjust the parameters according to the guide provided by nav2 to obtain the best navigation performance.
The following are the default nav2 parameters of AGV Pro
amcl:
ros__parameters:
use_sim_time: False
alpha1: 0.4
alpha2: 0.3
alpha3: 0.1
alpha4: 0.1
alpha5: 0.1
base_frame_id: "base_footprint"
beam_skip_distance: 0.5
beam_skip_error_threshold: 0.9
beam_skip_threshold: 0.3
do_beamskip: false
global_frame_id: "map"
lambda_short: 0.1
laser_likelihood_max_dist: 2.0
laser_max_range: 100.0
laser_min_range: -1.0
laser_model_type: "likelihood_field"
max_beams: 60
max_particles: 2000
min_particles: 500
odom_frame_id: "odom"
pf_err: 0.05
pf_z: 0.99
recovery_alpha_fast: 0.0
recovery_alpha_slow: 0.0
resample_interval: 2
robot_model_type: "nav2_amcl::OmniMotionModel"
save_pose_rate: 0.5
sigma_hit: 0.02
tf_broadcast: true
transform_tolerance: 0.3
update_min_a: 0.06
update_min_d: 0.025
z_hit: 0.7
z_max: 0.001
z_rand: 0.059
z_short: 0.24
# Initial Pose
set_initial_pose: True
initial_pose.x: 0.0
initial_pose.y: 0.0
initial_pose.z: 0.0
initial_pose.yaw: 0.0
amcl_map_client:
ros__parameters:
use_sim_time: False
amcl_rclcpp_node:
ros__parameters:
use_sim_time: False
bt_navigator:
ros__parameters:
use_sim_time: False
global_frame: map
robot_base_frame: base_footprint
odom_topic: /odom
bt_loop_duration: 10
default_server_timeout: 20
enable_groot_monitoring: True
groot_zmq_publisher_port: 1666
groot_zmq_server_port: 1667
# 'default_nav_through_poses_bt_xml' and 'default_nav_to_pose_bt_xml' are use defaults:
# nav2_bt_navigator/navigate_to_pose_w_replanning_and_recovery.xml
# nav2_bt_navigator/navigate_through_poses_w_replanning_and_recovery.xml
# They can be set here or via a RewrittenYaml remap from a parent launch file to Nav2.
plugin_lib_names:
- nav2_compute_path_to_pose_action_bt_node
- nav2_compute_path_through_poses_action_bt_node
- nav2_follow_path_action_bt_node
- nav2_back_up_action_bt_node
- nav2_spin_action_bt_node
- nav2_wait_action_bt_node
- nav2_clear_costmap_service_bt_node
- nav2_is_stuck_condition_bt_node
- nav2_goal_reached_condition_bt_node
- nav2_goal_updated_condition_bt_node
- nav2_initial_pose_received_condition_bt_node
- nav2_reinitialize_global_localization_service_bt_node
- nav2_rate_controller_bt_node
- nav2_distance_controller_bt_node
- nav2_speed_controller_bt_node
- nav2_truncate_path_action_bt_node
- nav2_goal_updater_node_bt_node
- nav2_recovery_node_bt_node
- nav2_pipeline_sequence_bt_node
- nav2_round_robin_node_bt_node
- nav2_transform_available_condition_bt_node
- nav2_time_expired_condition_bt_node
- nav2_distance_traveled_condition_bt_node
- nav2_single_trigger_bt_node
- nav2_goal_updated_controller_bt_node
- nav2_is_battery_low_condition_bt_node
- nav2_navigate_through_poses_action_bt_node
- nav2_navigate_to_pose_action_bt_node
- nav2_remove_passed_goals_action_bt_node
- nav2_planner_selector_bt_node
- nav2_controller_selector_bt_node
- nav2_goal_checker_selector_bt_node
bt_navigator_rclcpp_node:
ros__parameters:
use_sim_time: False
controller_server:
ros__parameters:
use_sim_time: False
controller_frequency: 5.0
min_x_velocity_threshold: 0.001
min_y_velocity_threshold: 0.5
min_theta_velocity_threshold: 0.001
failure_tolerance: 3.0
progress_checker_plugin: "progress_checker"
goal_checker_plugins: ["general_goal_checker"] # "precise_goal_checker"
controller_plugins: ["FollowPath"]
# Progress checker parameters
progress_checker:
plugin: "nav2_controller::SimpleProgressChecker"
required_movement_radius: 0.5
movement_time_allowance: 10.0
# Goal checker parameters
#precise_goal_checker:
# plugin: "nav2_controller::SimpleGoalChecker"
# xy_goal_tolerance: 0.25
# yaw_goal_tolerance: 0.25
# stateful: True
general_goal_checker:
stateful: True
plugin: "nav2_controller::SimpleGoalChecker"
xy_goal_tolerance: 0.25
yaw_goal_tolerance: 0.25
# DWB parameters
FollowPath:
plugin: "dwb_core::DWBLocalPlanner"
debug_trajectory_details: True
min_vel_x: 0.0
min_vel_y: 0.0
max_vel_x: 0.26
max_vel_y: 0.0
max_vel_theta: 0.5
min_speed_xy: 0.0
max_speed_xy: 0.26
min_speed_theta: 0.0
# Add high threshold velocity for turtlebot 3 issue.
# https://github.com/ROBOTIS-GIT/turtlebot3_simulations/issues/75
acc_lim_x: 2.5
acc_lim_y: 0.0
acc_lim_theta: 0.25
decel_lim_x: -2.5
decel_lim_y: 0.0
decel_lim_theta: -0.25
vx_samples: 20
vy_samples: 5
vtheta_samples: 20
sim_time: 1.7
linear_granularity: 0.05
angular_granularity: 0.025
transform_tolerance: 0.1
xy_goal_tolerance: 0.25
trans_stopped_velocity: 0.1
short_circuit_trajectory_evaluation: True
stateful: True
critics: ["RotateToGoal", "Oscillation", "BaseObstacle", "GoalAlign", "PathAlign", "PathDist", "GoalDist"]
BaseObstacle.scale: 0.02
PathAlign.scale: 32.0
PathAlign.forward_point_distance: 0.1
GoalAlign.scale: 24.0
GoalAlign.forward_point_distance: 0.1
PathDist.scale: 32.0
GoalDist.scale: 24.0
RotateToGoal.scale: 32.0
RotateToGoal.slowing_factor: 5.0
RotateToGoal.lookahead_time: -1.0
controller_server_rclcpp_node:
ros__parameters:
use_sim_time: False
local_costmap:
local_costmap:
ros__parameters:
update_frequency: 5.0
publish_frequency: 2.0
global_frame: odom
robot_base_frame: base_footprint
use_sim_time: False
rolling_window: true
width: 3
height: 3
resolution: 0.05
footprint: "[[0.26, 0.18], [0.26, -0.18], [-0.26, -0.18], [-0.26, 0.18]]"
plugins: ["voxel_layer", "inflation_layer"]
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 5.0
inflation_radius: 0.25
voxel_layer:
plugin: "nav2_costmap_2d::VoxelLayer"
enabled: True
publish_voxel_map: True
origin_z: 0.0
z_resolution: 0.05
z_voxels: 16
max_obstacle_height: 2.0
mark_threshold: 0
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
map_subscribe_transient_local: True
always_send_full_costmap: True
local_costmap_client:
ros__parameters:
use_sim_time: False
local_costmap_rclcpp_node:
ros__parameters:
use_sim_time: False
global_costmap:
global_costmap:
ros__parameters:
update_frequency: 0.3
publish_frequency: 0.3
global_frame: map
robot_base_frame: base_footprint
use_sim_time: False
robot_radius: 0.22
resolution: 0.05
track_unknown_space: true
plugins: ["static_layer", "obstacle_layer", "inflation_layer"]
obstacle_layer:
plugin: "nav2_costmap_2d::ObstacleLayer"
enabled: True
observation_sources: scan
scan:
topic: /scan
max_obstacle_height: 2.0
clearing: True
marking: True
data_type: "LaserScan"
raytrace_max_range: 3.0
raytrace_min_range: 0.0
obstacle_max_range: 2.5
obstacle_min_range: 0.0
static_layer:
plugin: "nav2_costmap_2d::StaticLayer"
map_subscribe_transient_local: True
inflation_layer:
plugin: "nav2_costmap_2d::InflationLayer"
cost_scaling_factor: 5.0
inflation_radius: 0.25
always_send_full_costmap: True
global_costmap_client:
ros__parameters:
use_sim_time: False
global_costmap_rclcpp_node:
ros__parameters:
use_sim_time: False
map_server:
ros__parameters:
use_sim_time: False
yaml_filename: "turtlebot3_world.yaml"
map_saver:
ros__parameters:
use_sim_time: False
save_map_timeout: 5.0
free_thresh_default: 0.25
occupied_thresh_default: 0.65
map_subscribe_transient_local: True
planner_server:
ros__parameters:
expected_planner_frequency: 1.0
use_sim_time: False
planner_plugins: ["GridBased"]
GridBased:
plugin: "nav2_navfn_planner/NavfnPlanner"
tolerance: 2.0
use_astar: false
allow_unknown: true
planner_server_rclcpp_node:
ros__parameters:
use_sim_time: False
recoveries_server:
ros__parameters:
costmap_topic: local_costmap/costmap_raw
footprint_topic: local_costmap/published_footprint
cycle_frequency: 10.0
recovery_plugins: ["spin", "backup", "wait"]
spin:
plugin: "nav2_recoveries/Spin"
backup:
plugin: "nav2_recoveries/BackUp"
wait:
plugin: "nav2_recoveries/Wait"
global_frame: odom
robot_base_frame: base_footprint
transform_timeout: 0.1
use_sim_time: False
simulate_ahead_time: 2.0
max_rotational_vel: 1.0
min_rotational_vel: 0.4
rotational_acc_lim: 3.2
robot_state_publisher:
ros__parameters:
use_sim_time: False
waypoint_follower:
ros__parameters:
loop_rate: 20
stop_on_failure: false
waypoint_task_executor_plugin: "wait_at_waypoint"
wait_at_waypoint:
plugin: "nav2_waypoint_follower::WaitAtWaypoint"
enabled: True
waypoint_pause_duration: 200