Catalogue
Introduction
1 Product Introduction
1.1 Product Introduction
1.2 Application Scenario
2 Product Feature
2.1 Basic Edition
2.2 Visual-Navigation Edition
2.3 Electrical Characteristic Parameter
3 User Notes
3.1 Safety Instruction
3.2 Product Care
3.3 Charging Instruction
4 First Install and Use
4.1 Basic Version
4.2 Navigation-Visual Version
4.2.1 Unboxing video
4.2.2 Bill Of Materials
4.2.3 System Introduction
4.2.4 Quick Experience
5 Basic Application
5.1 Image Update Instructions
5.2 ExceptionInformation
5.2.1 ExceptionInformation
6 SDK Development
6.1 ApplicationBasePython
6.1.1 Environment Building
6.1.2 Introduction to API
6.2 ApplicationBaseROS2
6.2.1 ROS2 Introduction
6.2.2 Real-time Mapping with Gmapping
6.2.3 Navigation2
6.2.4 Multi AGV Pro control
6.2.5 Gazebo simulation
6.2.6 Real_Time_Mapping_with_Point_lio
6.2.7 Real_Time_Mapping_with_FAST_LIO
6.2.8 Autocharge
6.2.9 Rtabmap
6.3 ApplicationBaseSerialPortProtocol
6.3.1 ApplicationBaseSerialPortProtocol
7 Scenario Examples
7.1 myAGVPro+MyArmM750 Composite Robot
7.2 myAGVPro+MyCobot320 Composite Robot
7.3 myAGVPro+MyCobotPro630 Composite Robot
8 Download Area
8.1 Structure Data Download
8.2 Software Data Download
9 About Us
9.1 Elephant Robotics
9.2 Contact us
Published with GitBook
In this Chapter:
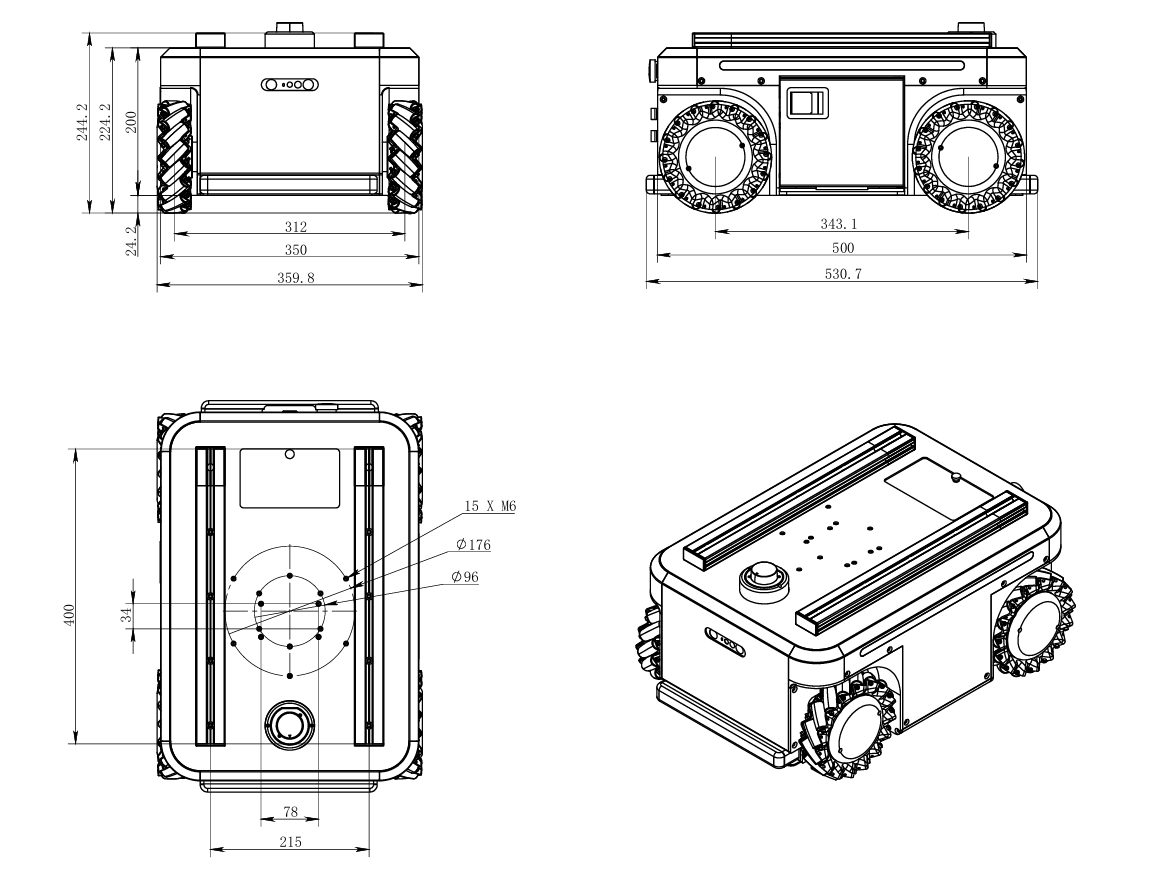
2.3 Electrical Characteristic Parameter
Structural drawing
← 上一页
results matching "
"
No results matching "
"