Serial Communication Protocol
1 Supported Models
Standard and Advanced versions of MyAGVPro
2 USB Communication Settings
- Baud Rate: 1000000
- Data Bits: 8
- Parity: None
- Stop Bits: 1
Main Interface:
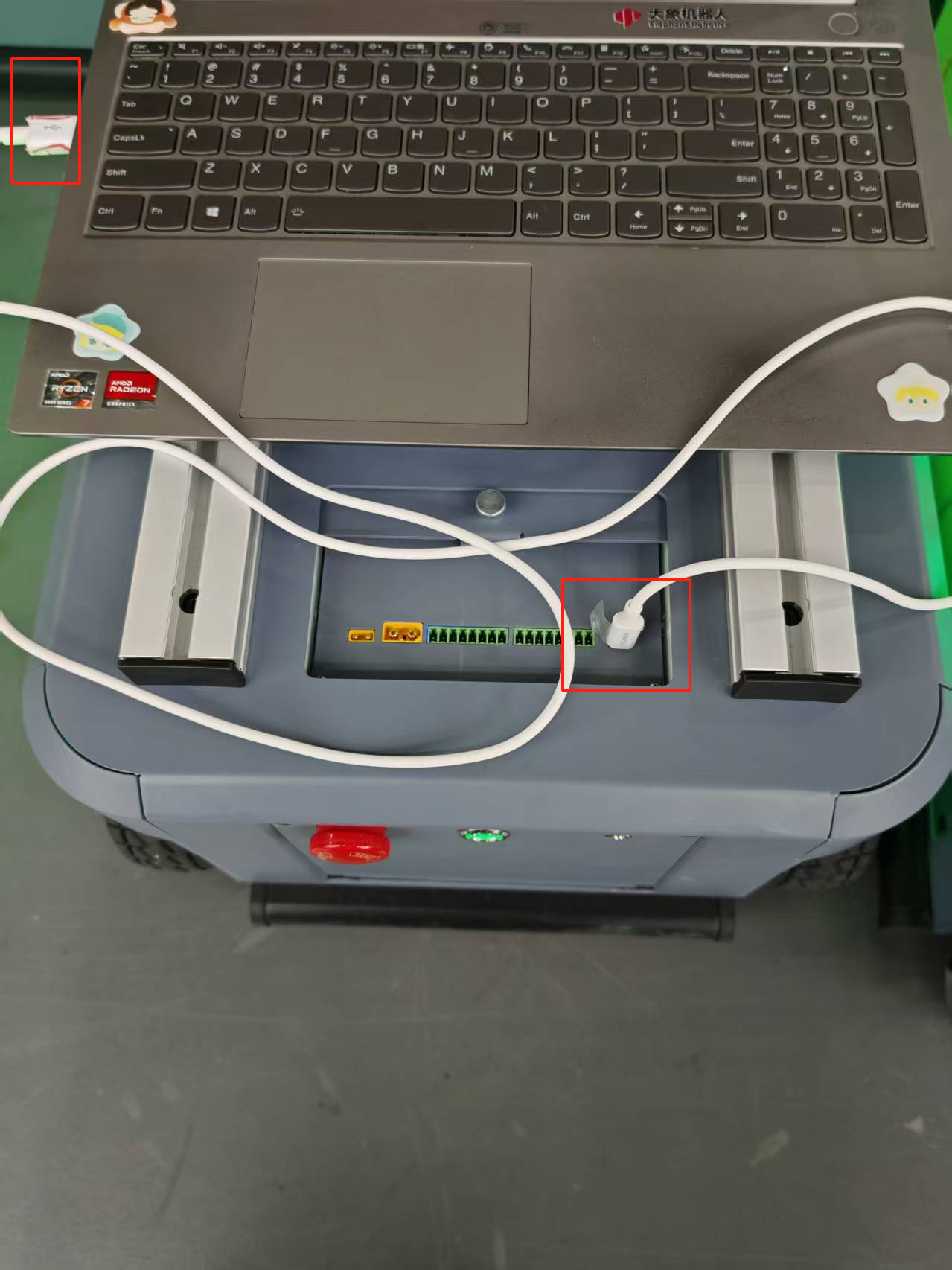
Standard Version: Communication between PC and main controller via USB Type-C:
Advanced Version: Communication between Jetson Orin Nano and main controller, no additional wiring required
Communication Frequency: 100Hz for 95% of interfaces
3 Protocol Format for Sending and Receiving
Both sending and receiving are represented in hexadecimal. Each command consists of 5 parts as follows:
- Frame Header: 0xFE 0xFE
- Payload Length: Fixed at 0x0B
- Function Code: 0 ~ 0x53
- Data Field: Fixed 8 bytes, pad with 0 if insufficient
- Frame Footer: CRC16-Modbus, high byte first
4 Protocol Explanation
Except for the startup command, all configuration interfaces return 1 by default; byte1 = 1 indicates the command was received.
| Type | Data | Bytes | Function |
|---|---|---|---|
| Command Frame | Start Byte: 0 | 1 | Frame header identifier, 0xFE |
| Start Byte: 1 | 1 | Frame header identifier, 0xFE | |
| Data Length | 1 | Fixed length of 8 | |
| Function Code | 1 | Depends on the specific command | |
| Command Frame | Data | 8 | Command and data, varies by command |
| End Frame | End Byte: 0 | 1 | Frame footer, CRC16-Modbus high byte |
| End Byte: 1 | 1 | Frame footer, CRC16-Modbus low byte |
5 Individual Command Descriptions
Start the Robot
By default, the robot starts automatically upon power-on. The AGVPro can only be controlled after a successful startup. If the robot is not started or the startup fails, only certain information such as version can be read.
Function Code: 0x10
Example:
Serial Send: byte1–8: 0
FE FE 0B 10 00 00 00 00 00 00 00 00 1A 45
Serial Recv: Response time ≤ 2.1 seconds; status byte range: 1–5
- 1 - Normal
- 2 - Emergency stop pressed
- 3 - Battery too low (below startup threshold)
- 4 - CAN initialization error
- 5 - Motor initialization error
start success:
FE FE 0B 10 01 00 00 00 00 00 00 00 D6 84
Send Instructions:
| Data Field | Description | Data |
|---|---|---|
| Data[0] | Identification Frame | 0xFE |
| Data[1] | Identification Frame | 0xFE |
| Data[2] | Data Length Frame | 0x0B |
| Data[3] | Command Frame | 0x10 |
| Data[4] | Data Frame | 0x00 |
| Data[5] | Data Frame | 0x00 |
| Data[6] | Data Frame | 0x00 |
| Data[7] | Data Frame | 0x00 |
| Data[8] | Data Frame | 0x00 |
| Data[9] | Data Frame | 0x00 |
| Data[10] | Data Frame | 0x00 |
| Data[11] | Data Frame | 0x00 |
| Data[12] | End Frame | 0x1A |
| Data[13] | End Frame | 0x45 |
Recv Instruction:
| Data Field | Description | Data |
|---|---|---|
| Data[0] | Identification Frame | 0xFE |
| Data[1] | Identification Frame | 0xFE |
| Data[2] | Data Length Frame | 0x0B |
| Data[3] | Command Frame | 0x10 |
| Data[4] | Data Frame | 0x01 |
| Data[5] | Data Frame | 0x00 |
| Data[6] | Data Frame | 0x00 |
| Data[7] | Data Frame | 0x00 |
| Data[8] | Data Frame | 0x00 |
| Data[9] | Data Frame | 0x00 |
| Data[10] | Data Frame | 0x00 |
| Data[11] | Data Frame | 0x00 |
| Data[12] | End Frame | 0xD6 |
| Data[13] | End Frame | 0x84 |
Read the main version number
function code:0x02
eg:
Serial Send:byte1-8:0
FE FE 0B 02 00 00 00 00 00 00 00 00 BA 91
Serial Recv:byte1:version,/10
FE FE 0B 02 10 00 00 00 00 00 00 00 B6 90
This is the return,the main version is 1.0.
Get Robot Status
function code:0x05
eg:
Serial Send:byte1-8:0
FE FE 0B 05 00 00 00 00 00 00 00 00 8A B7
Serial Recv:
byte1:Machine Status (Whole System Status)
Byte 2: Battery level, unit: % (value / 10)
Byte 3 to Byte 8: Reserved (all set to 0)
Status Byte Explanation (Byte 1 - Machine Status Flags)
Each bit in Byte 1 represents a specific status flag:
Bit Meaning Value 0 Value 1
Bit 0 Emergency stop status Normal Emergency stop
Bit 1 Power-on status Powered on Not powered on
Bit 2 Bumper strip 1 status Normal Triggered
Bit 3 Bumper strip 2 status Normal Triggered
Bit 4 Motor 1 connection status Connected Disconnected
Bit 5 Motor 2 connection status Connected Disconnected
Bit 6 Motor 3 connection status Connected Disconnected
Bit 7 Motor 4 connection status Connected Disconnected
A value of 0 means normal, 1 indicates an abnormal or error state for all status bits.
eg:
FE FE 0B 05 00 F0 00 00 00 00 00 00 85 47
This is the return,1-4 motors are functioning properly and the battery voltage is 24V.
Power On Only
function code:0x19
Only when powered on, the machine cannot move. The available interfaces are: start the robot, query the startup status of the machine, read the main version number, and read the machine status.
eg:
Serial Send:byte1-8:0
FE FE 0B 19 00 00 00 00 00 00 00 00 4A 2F
Serial Recv:the return time:<= 2.1s,byte1-8:0
FE FE 0B 19 01 00 00 00 00 00 00 00 86 EE
Close Robot
function code:0x11
After shutting down the machine, the available functions will be the same as when it is powered on, and the wheels will be released.
eg:
Serial Send:byte1-8:0
FE FE 0B 11 00 00 00 00 00 00 00 00 E7 1C
Serial Recv:byte1-8:0
FE FE 0B 11 01 00 00 00 00 00 00 00 46 89
Query the startup status of the machine
function code:0x12
eg:
Serial Send:byte1-8:0
FE FE 0B 12 00 00 00 00 00 00 00 00 7A 5C
Serial Recv:byte1: state 0/1,0-start failed,1-start success;byte2-8:0
success:
FE FE 0B 12 01 00 00 00 00 00 00 00 B6 9D
Motion
function code:0x21
Advance, retreat, leftward movement, rightward movement, clockwise rotation, counterclockwise rotation.
eg:
Serial Send:
Byte 1–2: Forward/Backward speed × 100.
Positive = Forward, Negative = Backward
Max speed: 1.5 m/s
Byte 3–4: Left/Right movement × 100.
Positive = Left, Negative = Right
Max speed: 1.0 m/s
Byte 5–6: Rotation speed × 100.
Positive = Clockwise, Negative = Counter-clockwise
Byte 7–8: Reserved (set to 0)
1m/s Forward:
FE FE 0B 21 00 64 00 00 00 00 00 00 4D 39
0.5m/s Right movement:
FE FE 0B 21 00 00 FF CE 00 00 00 00 54 61
0.1m/s Clockwise Rotation:
FE FE 0B 21 00 00 00 00 00 0A 00 00 89 3C
Serial Recv:byte1:1;byte2-8:0
FE FE 0B 21 01 00 00 00 00 00 00 00 47 DD
If all data bits are set to 0, the movement can be stopped
Stop Motion
function code:0x22
eg:
Serial Send:byte1-8:0
FE FE 0B 22 00 00 00 00 00 00 00 00 7B 08
Serial Recv:byte1:1;byte2-8:0
FE FE 0B 22 01 00 00 00 00 00 00 00 B7 C9
Set the automatic upload status
function code:0x23
eg:
Serial Send:byte1:state 0/1,0-close;1-open,default 0;2-8:0
Enable automatic upload:
FE FE 0B 23 01 00 00 00 00 00 00 00 27 C4
Serial Recv:byte1:1;byte2-8:0
FE FE 0B 23 01 00 00 00 00 00 00 00 27 C4
Get the automatic upload status
function code:0x24
eg:
Serial Send:byte1-8:0
FE FE 0B 24 00 00 00 00 00 00 00 00 DB 23
Serial Recv:byte1:0/1;byte2-8:0
eg:
FE FE 0B 24 01 00 00 00 00 00 00 00 17 E2
Automatically upload content description
function code:0x25
Automatic upload frequency:20HZ
- byte1-3:linear velocity,/100
- byte4:Overall machine status: bit0: Emergency stop, bit1: Not started machine, bit2: Anti-collision strip 1, bit3: Anti-collision strip 2, bit4: Connection status of Motor No. 1, bit5: connection status of motor No. 2, bit6: Connection status of motor No. 3, bit7: Connection status of motor No. 4 0- normal
- byte5:When the motor reports an error, bit0-1 wheel, bit1-2 wheel, bit2-3 wheel, bit3-4 wheel (0-normal), it can be used
- byte6:battery voltage /10
- byte7:enabled state,0-enabled,If a wheel drops the enable, this status position is 1
- byte8:0
Serial Recveg:
This is the return,the motor is normal and the battery voltage is 21VFE FE 0B 25 00 00 00 00 00 D2 00 00 4B 2E
Set the enable status of the motor
function code:0x30
eg:
Serial Send:byte1,ID,1-4/254,254-set all;byte2,state 0/1,0-disabed,1-enable;byte3-8:0
motor 1 enable:
FE FE 0B 30 01 01 00 00 00 00 00 00 D7 0D
all disable:
FE FE 0B 30 FE 00 00 00 00 00 00 00 13 52
Serial Recv:byte1:1;byte2-8:0
FE FE 0B 30 01 00 00 00 00 00 00 00 17 1D
Read the status of all motors
function code:0x31
eg:
Serial Send:byte1-8:0
FE FE 0B 31 00 00 00 00 00 00 00 00 4B D1
Serial Recv:byte1-4:1-4 motor state;byte2-8:0
motor state:0-normal;> 0 error:
- bit1 is under-voltage
- bit2 driver exception
- bit3 is overheated
- bit4: Magnetic coding anomaly
- bit5: Overload
- bit6: Uncalibrated
eg:
This is the return,1-4 motor normalFE FE 0B 31 00 00 00 00 00 00 00 00 4B D1
Read the temperatures of all motors
function code:0x35
eg:
Serial Send:byte1-8:0
FE FE 0B 35 00 00 00 00 00 00 00 00 8B E3
Serial Recv:byte1-8:4X2 motors temperature,/10
eg:
FE FE 0B 35 01 2C 01 2C 01 2C 01 2C EA 9F
This is the return,1-4 motors temperature:30°
Read the rotational speeds of all motors
function code:0x36
eg:
Serial Send:byte1-8:0
FE FE 0B 36 00 00 00 00 00 00 00 00 7B F7
Serial Recv:byte1-8:4X2 motors speed,/100,range:+-44rad/s
eg:
FE FE 0B 36 03 F4 03 F4 03 F4 03 F4 86 F3
This is the return,1-4 motors speed:10.12rad/s
Read the torque of all motors
function code:0x37
eg:
Serial Send:byte1-8:0
eg:
FE FE 0B 37 00 00 00 00 00 00 00 00 EB FA
Serial Recv:byte1-8:4X2motors torque,/100,range:+-17N
eg:
FE FE 0B 37 01 2C 01 2C 01 2C 01 2C 8A 86
This is the return,1-4 motors torque:3N
Read the enable status of all motors
function code:0x38
eg:
Serial Send:byte1-8:0
FE FE 0B 38 00 00 00 00 00 00 00 00 1B BB
Serial Recv:byte1-4:4X1 motor enabled state,0/1,0-disable,1-enable;byte5-8:0
eg:
FE FE 0B 38 01 01 01 01 00 00 00 00 06 56
Set the communication mode
function code:0x32
eg:
Serial Send:byte1:mode,0-2,default0;byte2-8:0
模式:0-uart,1-wifi,2-ble;Except for the serial port mode, it is a normal phenomenon that this statement does not return after switching to other modes.
eg:
FE FE 0B 32 02 00 00 00 00 00 00 00 62 44
Serial Recv:Set to Bluetooth mode, first return the ASCII code Bluetooth address, ASCII code, frame header:“AGVPro:BLE:MAC:”;frame end:“;\r\n”
eg:
AGVPro:BLE:MAC:0c:8b:95:bd:0a:ce;\r\n
Read communication mode
function code:0x33
eg:
Serial Send:byte1-8:0
FE FE 0B 33 00 00 00 00 00 00 00 00 2B C8
Serial Recv:byte1:mode,0-2;byte2-8:0
eg:
FE FE 0B 33 01 00 00 00 00 00 00 00 E7 09
DIY light strip
Set the color and brightness of the left and right light strips
function code:0x34
eg:
Serial Send:byte1:left/right light strip;byte2:brightness,0-255;byte3-5:RGB;byte6-8:0
eg:
FE FE 0B 34 01 FA FF 00 00 00 00 00 D7 61
Serial Recv:byte1:mode,0-2;byte2-8:0
eg:
FE FE 0B 34 01 00 00 00 00 00 00 00 D7 2F
Set the light strip mode
function code:0x3A
eg:
Serial Send:byte1:模式,0/1,0-electric quantity display
,1-DIY;byte2-8:0
eg:
FE FE 0B 3A 01 00 00 00 00 00 00 00 B7 63
Serial Recv:byte1:1;byte2-8:0
eg:
FE FE 0B 3A 01 00 00 00 00 00 00 00 B7 63
Set the status of the output pins
function code:0x40
eg:
Serial Send:byte1:pin number,1-6;byte2:status,0/1,1-high,0-low;byte3-8:0
eg:
FE FE 0B 40 01 01 00 00 00 00 00 00 15 68
Serial Recv:byte1:1;byte2-8:0
eg:
FE FE 0B 40 01 00 00 00 00 00 00 00 D5 78
Read the status of the input pins
function code:0x41
eg:
Serial Send:byte1:pin number,1-6/254,254-scram button
;byte2-8:0
eg:
FE FE 0B 41 01 00 00 00 00 00 00 00 45 75
Serial Recv:pin number,1-6;byte2:status,0/1/255,255-A non-existent pin;byte3-8:0
eg:
FE FE 0B 41 01 01 00 00 00 00 00 00 85 65
Read the WIFI account password
function code:0x50
eg:
Serial Send:byte1-8:0
FE FE 0B 50 00 00 00 00 00 00 00 00 D9 74
Serial Recv:ASCII,Frame header:“AGVPro:WIFI:”;Frame end:“;\r\n”
Fixed return:
AGVPro:WIFI:S:ElephantAGVPro-AP2.4G;P:elephant;\r\n
Read the WiFi ip and port number
function code:0x51
eg:
Serial Send:byte1-8:0
FE FE 0B 51 00 00 00 00 00 00 00 00 49 79
Serial Recv:ASCII,Frame header:“AGVPro:WIFI:”;Frame end:“;\r\n”
Fixed return:
AGVPro:WIFI:IP:192.168.4.1;PORT:9000;\r\n
Read the Bluetooth name and uuid
function code:0x52
eg:
Serial Send:byte1-8:0
FE FE 0B 52 00 00 00 00 00 00 00 00 B9 6D
Serial Recv:ASCII,Frame header:“AGVPro:BLE::”;Frame end:“;\r\n”
Fixed return:
AGVPro:BLE::Name:BLE-Elephant-AGVPro;Service_UUID:9a95aa42-ba2f-4bd0-8296-73c0c89c0871;CHAR_UUID:d886e992-a18a-4dc3-9362-2fc15b4b576a;\r\n
Read the Bluetooth address
function code:0x53
eg:
Serial Send:byte1-8:0
FE FE 0B 53 00 00 00 00 00 00 00 00 29 60
Serial Recv:ASCII,Frame header:“AGVPro:BLE:MAC:”;Frame end:“;\r\n”
eg:
AGVPro:BLE:MAC:0c:8b:95:bd:0a:ce;\r\n