规格尺寸
1、 2D 文件
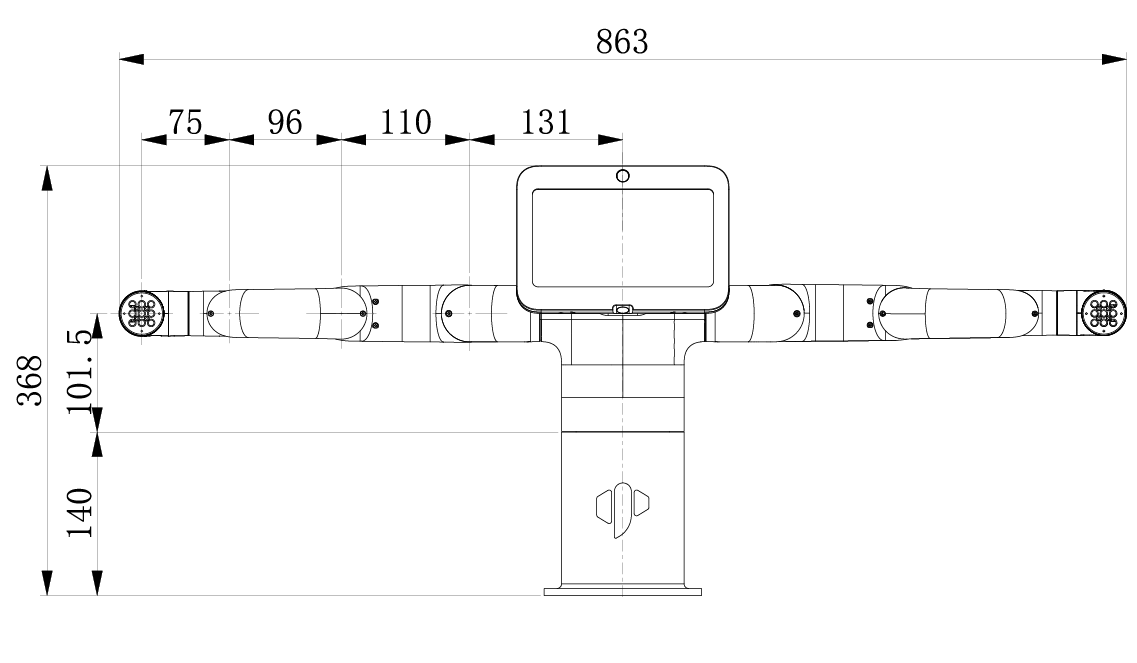
1.1 正视图
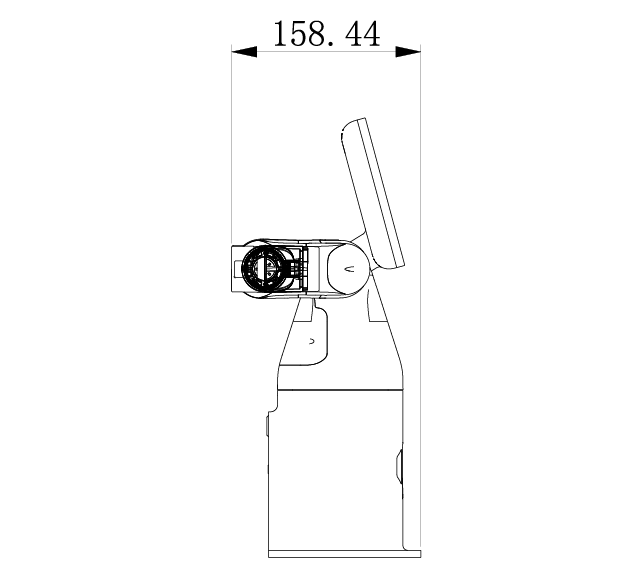
1.2 侧视图
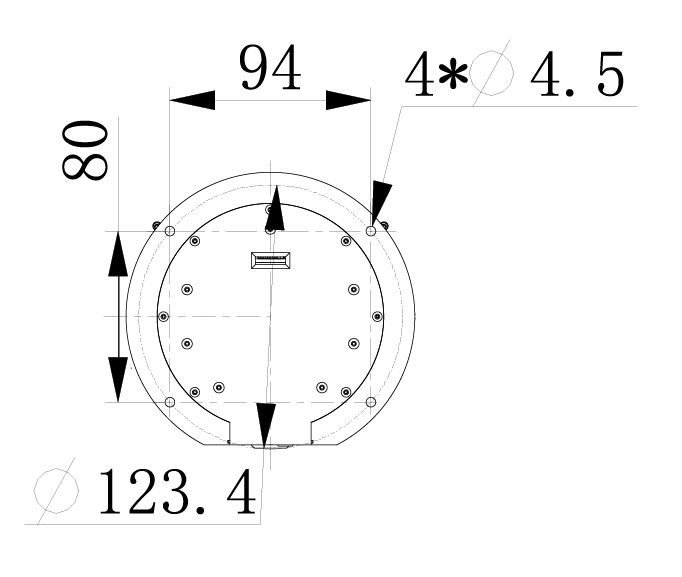
1.3 底座固定孔位
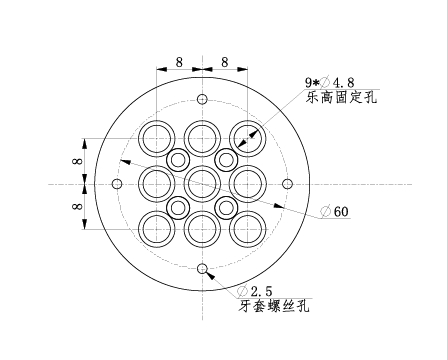
1.4 末端固定孔位
2、 3D 文件
3D Download
运动学模型
2、 DH模型
2.1 整机建模
mybuddy280由Right机械臂、Left机械臂以及本体部分构成,由下图可知左右臂的基坐标系存在一定的偏转,为了方便在笛卡尔空间描述双臂的末端执行器,我们规定了位于本体底部的Base坐标系,其原点位于底座中心,x轴垂直屏幕向外,y轴水平向右,z轴竖直向上。
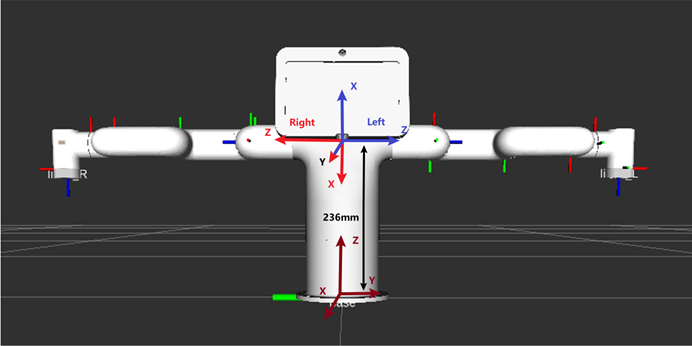
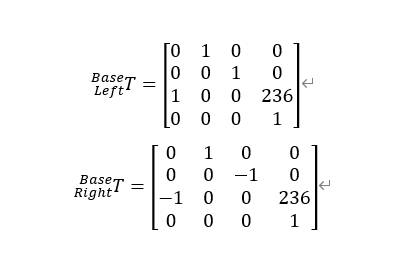
由于Base坐标系与Right、Left坐标系的相对关系无法用DH参数法描述,此处直接给出两者的齐次变换矩阵:
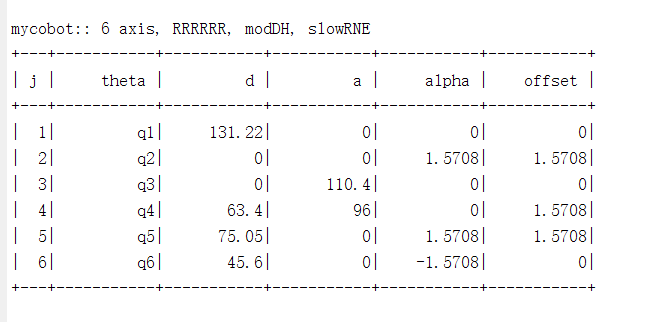
2.2 左臂DH参数
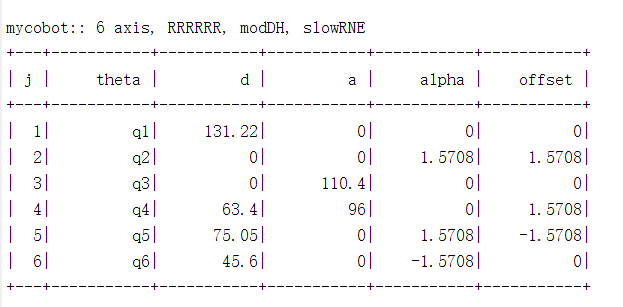
2.3 右臂DH参数
2.4 Base坐标运动范围
| Base坐标 | left | right |
|---|---|---|
| x | 0 ~ 250 | 0 ~ 250 |
| y | -40 ~ 260 | -260 ~ 40 |
| z | 0 ~ 480 | 0 ~ 480 |
| rx/ry/rz | -180 ~ 180 | -180 ~ 180 |