Questions about the Structure
Q1: What are the maximum angle of Joint 1 and Joint 5 of myCobot?
A1: The maximum angle of Joint 1 and Joint 5 are 160° both clockwise and anticlockwise. Remember to rotate the joints gently. Do not force a rotation when the joint reach its maximum angle.
Q2: What controls the six steering engine?
A2: They are controlled by Atom at the top of the robot.
Q3: What functions Atom performs?
A3: It serves to control the robot by algorithm, such as forward, inverse kinematics and coordinate switching. Atom is temporarily not open-sourced.
Questions about the Communication
Q1: Why the screen has no display although the robotic arm has been connected with HDMI cable? Does it need to download a port driver?
A1: Check whether the connection is correct and the power has been turned on. Try to use another interface and plunge into the interface stably. There is no need to download a port driver.
Q2: What are the versions of communication interface supported by different robotic arms?
A2: The robotic arms of micro-processor supports TCP communication, and the robotic arms of micro-controller supports USB-port communication.
Q3: How much is the frequency of the communication of robotic arm?
A3: 10-20Hz.
Questions about Parameters
Q1: What's the unit of measurement of the speed of robotic arm?
A2: 180°/s.
Solutions to Hardware Problems
How to deal with the shaking of robotic arms?
Step 1: Burn the latest version of ATOM via myStudio.
Step 2: Upgrade pymycobot. Click on Win+R, and type cmd to enter in the terminal. Type pip install pymycobot --upgrade --user and then click on Enter.
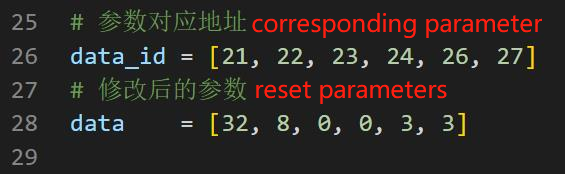
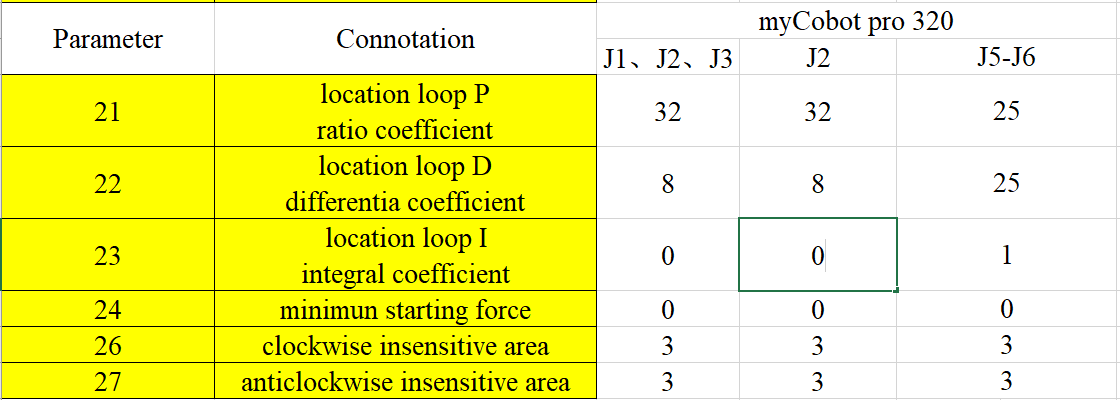
Step 3: Go to GitHub to download pid_read_write.py. Reset each parameter of the steering engine according to the prompt message. And then, operate the system again.
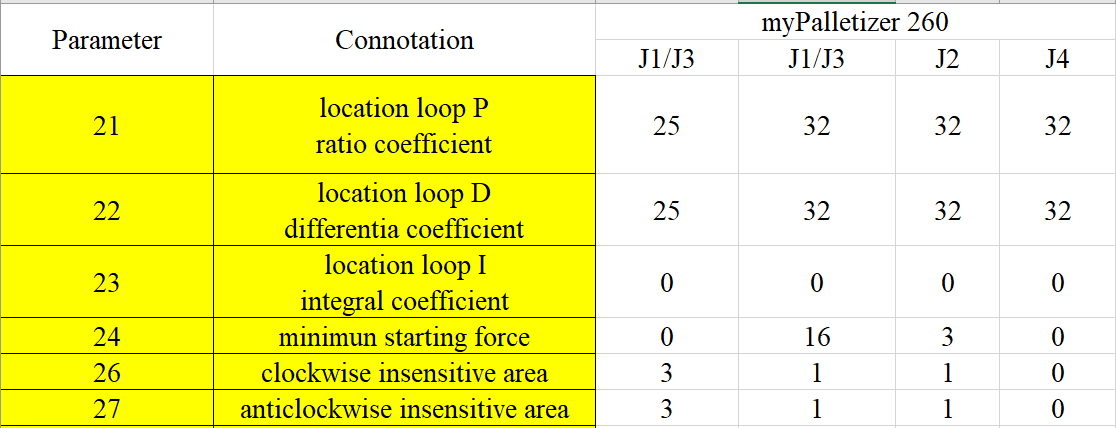
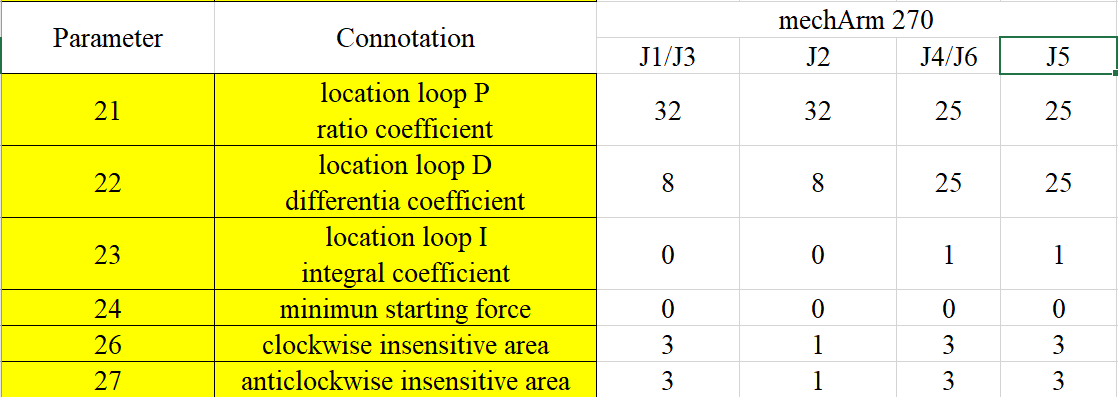
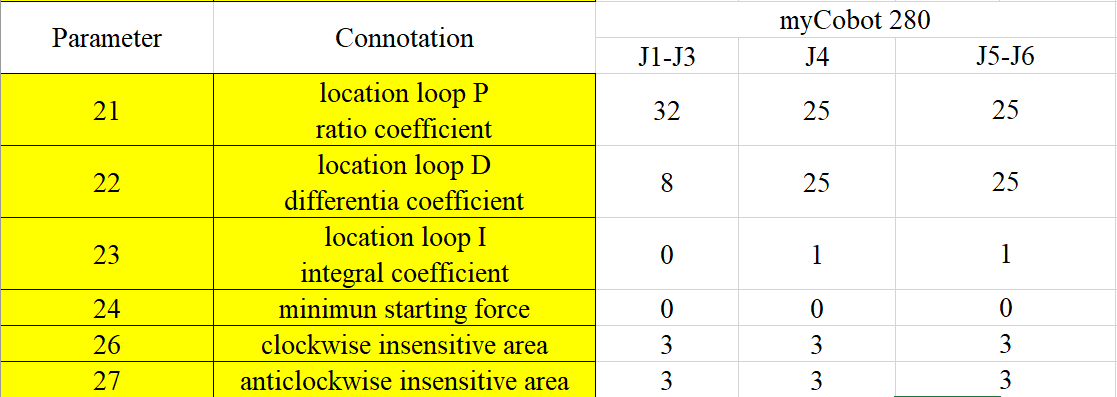
Notice: The parameters of each version of robot are different. Set the parameters according to the data given in the pictures below.
Questions about Gripper & End
Q1: Can the gripper close completely?
A1: Due to the thickness of the gripper, it cannot close completely. You resort to a shim to make it completely closed.
Q2: What is the kind of communication of adaptive gripper?
A2: It is TTL communication.
Q3: What is the communication of the end of myCobot 320?
A3: 485 communication interface.
Q4: How to fix a camera at the end of a robotic arm?
A4: A flange is required to fix a camera.
Other Questions
Q1: Why the electric engine powers off during usage?
A1: Because the engine is too hot to be used. Please wait for a few minutes and reuse again.
Q2: Does the robotic arms support the development based on Android?
A2: We doesn't support Android development. If you want to develop it by yourself, we can provide you with port protocol.
Q3:What is the function of the USB carried by the PI version?
A3: It serves to charge the robotic arm.