手柄控制
系统开机后,会自动启动程序,该程序支持启动颜色识别、形状识别、特征点图像识别、AR二维码识别、YOLOv5 图像识别、AiKit_UI程序、手柄控制程序、myCobot自适应夹爪案例、myCobot五指灵巧手案例以及stag码跟踪案例。
可以通过手柄来控制机器的运动,实现使用夹爪或者吸泵来抓取物体。
- 手柄按键功能如下:

- 1:RX坐标值增大
- 2:RX坐标值减小
- 3:RY坐标值增大
- 4:RY坐标值减小
- 5:X坐标值增大
- 6:X坐标值减小
- 7:Y坐标值增大
- 8:Y坐标值减小
- 9:Z坐标值减小
- 10:Z坐标值增大
- 11:RZ坐标值减小
- 12:RZ坐标值增大
- X:点击按钮,自适应夹爪张开
- Y:点击按钮,自适应夹爪关闭
- A:点击按钮,打开吸泵
- B:点击按钮,关闭吸泵
- Left1:长按2s,初始化机器人至关节零位状态。
- Left2:长按2s,机器人停止力矩输出,放松所有关节。
- Right1:长按2s,初始化机器人至移动初始点位。
- Right2:长按2s,机器人打开力矩输出,所有关节锁定。
注意:M5版本机器使用前需选择设备型号,PI版本则不需要。
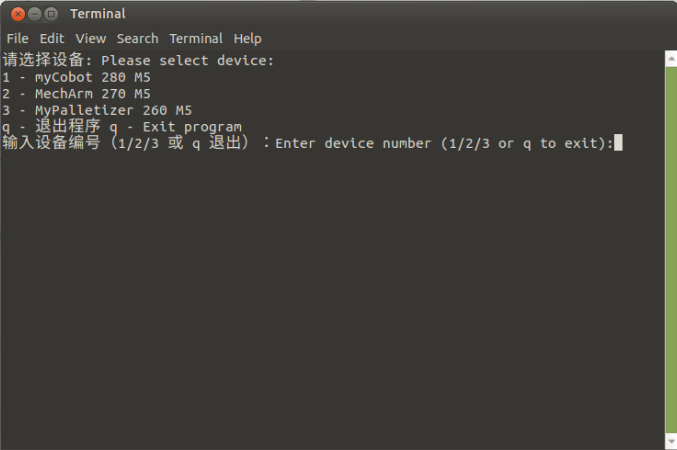
根据终端信息提示,选择对应机械臂型号,如果是PI版本设备,则忽略此步骤。这里以280M5为例,输入1:
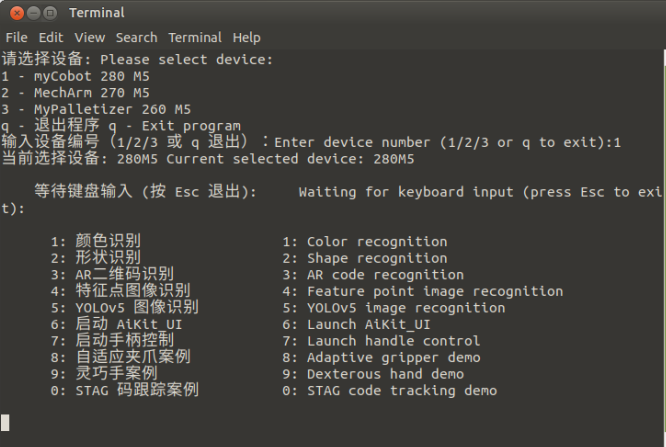
按下数字7,启动手柄控制功能。启动后需将键鼠设备切换到手柄控制模式,手柄按键功能使用参考如下(在运行程序以后,首先要先点击Right 1按钮,机器到达初始点位以后,才可以进行其他的操作。)
- 手柄键盘切换模式如下,按钮往左边拔切换为键盘模式,按钮往右边拨切换为手柄控制模式。


演示视频: