STAG码跟踪案例
将相机安装在机械臂的末端。 该功能使用 eye-in-hand 的方式。重新安装相机之后,需进行一次手眼标定。(注意:260、270设备不支持此功能)
系统开机后,会自动启动程序,该程序支持启动颜色识别、形状识别、特征点图像识别、AR二维码识别、YOLOv5 图像识别、AiKit_UI程序、手柄控制程序、myCobot自适应夹爪案例、myCobot五指灵巧手案例以及stag码跟踪案例。
注意:M5版本机器使用前需选择设备型号,PI版本则不需要。
根据终端信息提示,选择对应机械臂型号,如果是PI版本设备,则忽略此步骤。这里以280M5为例,输入1:
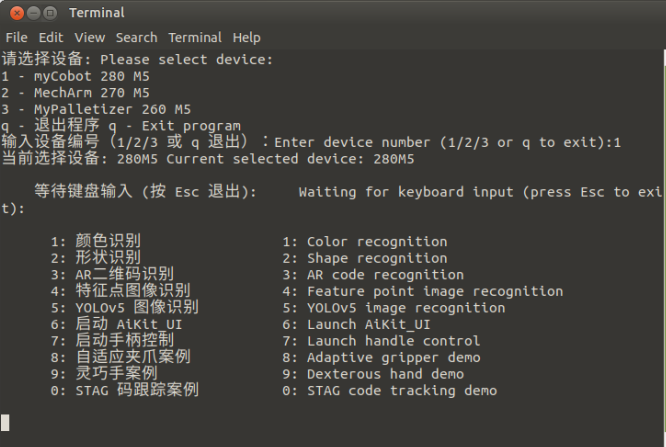
按下数字0,启动stag码跟踪案例功能。首先机械臂会运动到观测点初始位置,然后Stag码木块与机械臂末端摄像头法兰保持30cm距离,机械臂开始进行跟踪运动。

演示视频:
Stag码
本文使用stag码用作二维码跟踪,建议使用彩印,黑白打印识别率较低。
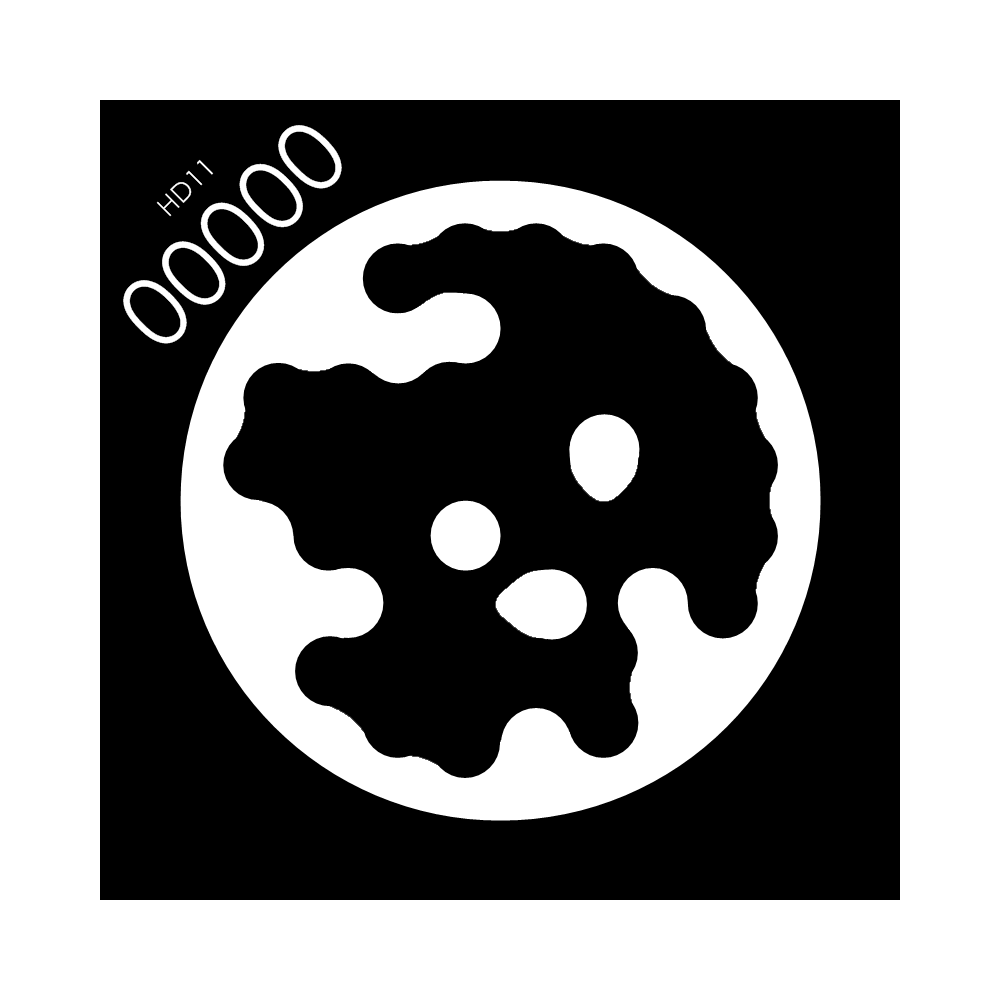
下载地址:Stag码下载
注意: stag码的左上角为编号,使用opencv的stag识别库可以识别该编号,你可以为不同编号设计不同的行为逻辑,比如00设为位置跟踪,01设为回到观测点。
手眼标定
2.1 手眼矩阵原理
手眼标定是视觉跟踪必不可少的一环,其作用是求得机械臂坐标系(手)与相机坐标系(眼)之间的相对关系,我们把这种相对关系用一个4*4的手眼矩阵来表示,具体原理可以参考以下链接: 手眼矩阵原理
2.2 手眼标定方法
注意: 重新安装相机之后,需进行一次手眼标定。
将相机装配到机械臂上(一般装配在机械臂末端),连接需要控制的机械臂
将 home/er/convenient_aikit/AiKit_280M5/scripts/camera_detect.py 文件部分内容修改如下:
if __name__ == "__main__":
# Load camera configuration parameters
camera_params = np.load("/home/er/convenient_aikit/AiKit_280M5/scripts/camera_params.npz")
mtx, dist = camera_params["mtx"], camera_params["dist"]
# Initialize the camera detector
m = camera_detect(0, 32, mtx, dist)
# Disable vision mode initially
mc.set_vision_mode(0)
# Uncomment the following lines to run specific functions
# m.camera_open_loop() # Open camera in a continuous loop
# m.stag_identify_loop() # Continuously detect STAG markers
# m.stag_robot_identify_loop(mc) # Continuously calculate robot coordinates based on STAG
m.Eyes_in_hand_calibration(mc) # Calibrate Eyes-in-Hand matrix
# m.vision_trace(0, mc) # Perform a one-time vision trace
# Start continuous vision trace loop
# m.vision_trace_loop(mc)
修改后保存,运行命令:
cd ~/convenient_aikit/AiKit_280M5/scripts/
python3 camera_detect.py
此时机械臂会先运动到观测姿态
offset_j5 = -90
self.origin_mycbot_level = [-45, 5, -104, 14, 90 + offset_j5, 40]
ml.send_angles(self.origin_mycbot_level, 50) # Move to observation point
注意: 用户可自定义修改观测点位,比如旋转6关节使相机处于更合适的位置。
- 运动到观测姿态后,终端会弹出以下提示,将stag码置于相机视野内,输入任意键即可继续识别
make sure camera can observe the stag, enter any key quit
- 若相机识别到stag码,则会自动进入下一步识别,机械臂移动并捕捉机械臂和相机的位置信息
Move the end of the robot arm to the calibration point, press any key to release servo
- 贴紧后根据提示,输入任意键完成手眼标定
focus servo and get current coords
此时会打印EyesInHand_matrix信息,视为标定完成,生成"EyesInHand_matrix.json配置文件,标定成功后无需重复操作! 具体效果参考如下视频,效果与mycobot 280类似:
注意:手眼标定可能会由于操作不当、机器虚位等原因出现误差,当视觉跟踪效果不好时,需要重新手眼标定