文档目录
Introduction
1 产品简介
1.1 产品介绍
1.2 应用场景
2 产品参数
2.1 Ai 便携实训箱-280版本
2.2 Ai 便携实训箱-270版本
2.3 Ai 便携实训箱-260版本
2.4 适配配件
2.4.1 自适应夹爪
2.4.2 灵巧手
2.4.3 垂直吸泵V2.0
2.4.4 myCobot 摄像头模组V2.0
3 用户须知
4 首次开箱
5 基础算法功能
5.1 颜色识别
5.2 形状识别
5.3 二维码识别
5.4 特征点识别
5.5 yolov5识别
5.6 AiKit可视化软件
5.7 手柄控制
5.8 STAG码跟踪案例
5.9 注意事项
6 机械臂知识快速学习
6.1 知识准备
6.2 串联机器人
6.3 电子背景知识
6.4 电子与舵机知识
6.5 机器人运动学
6.5.1 myCobot 六轴协作系列
6.5.2 myCobot 四轴协作系列
7 基础功能应用
7.1 myStudio
7.1.1 myStudio 环境搭建
7.1.2 烧录与更新固件
7.2 资料下载
Published with GitBook
在这篇文章中:
6.5.1 myCobot 六轴协作系列
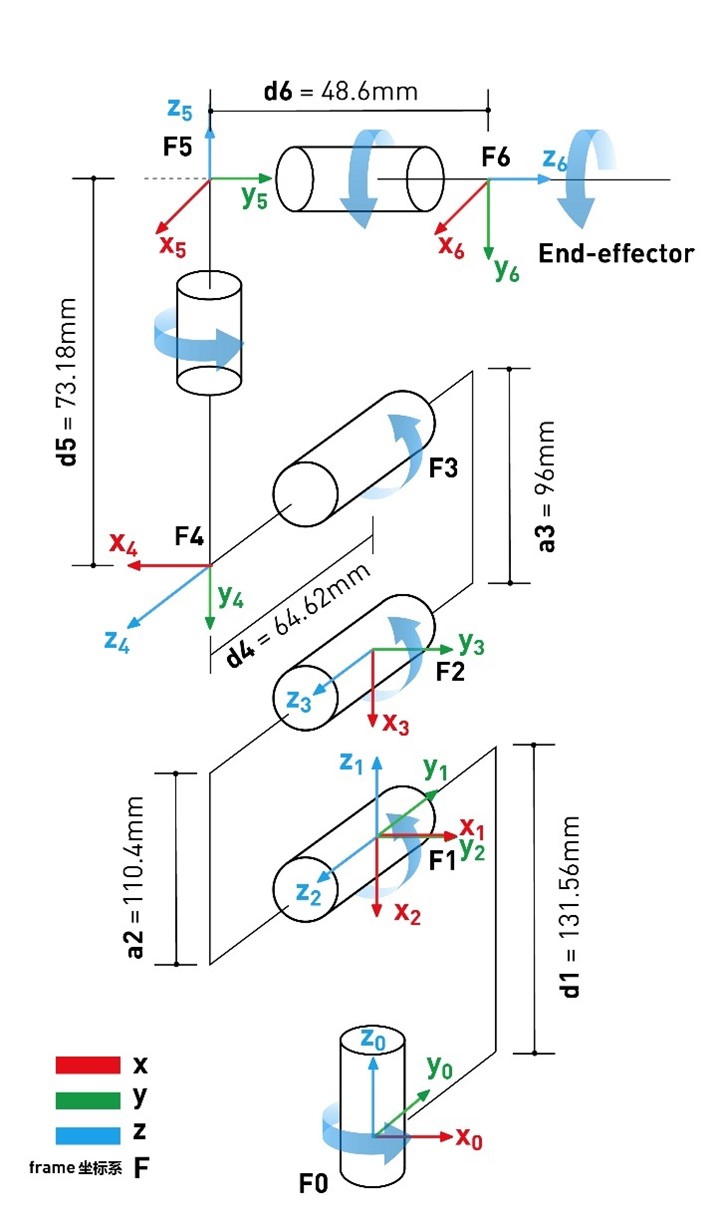
myCobot 280 算法
1 结构参数
1.1 机械臂DH参数
joint
theta
d
a
alpha
offset
1
q1
131.22
0
1.5708
0
2
q2
0
-110.4
0
-1.5708
3
q3
0
-96
0
0
4
q4
63.4
0
1.5708
-1.5708
5
q5
75.05
0
-1.5708
1.5708
6
q6
45.6
0
0
0
1.2 运动学模型
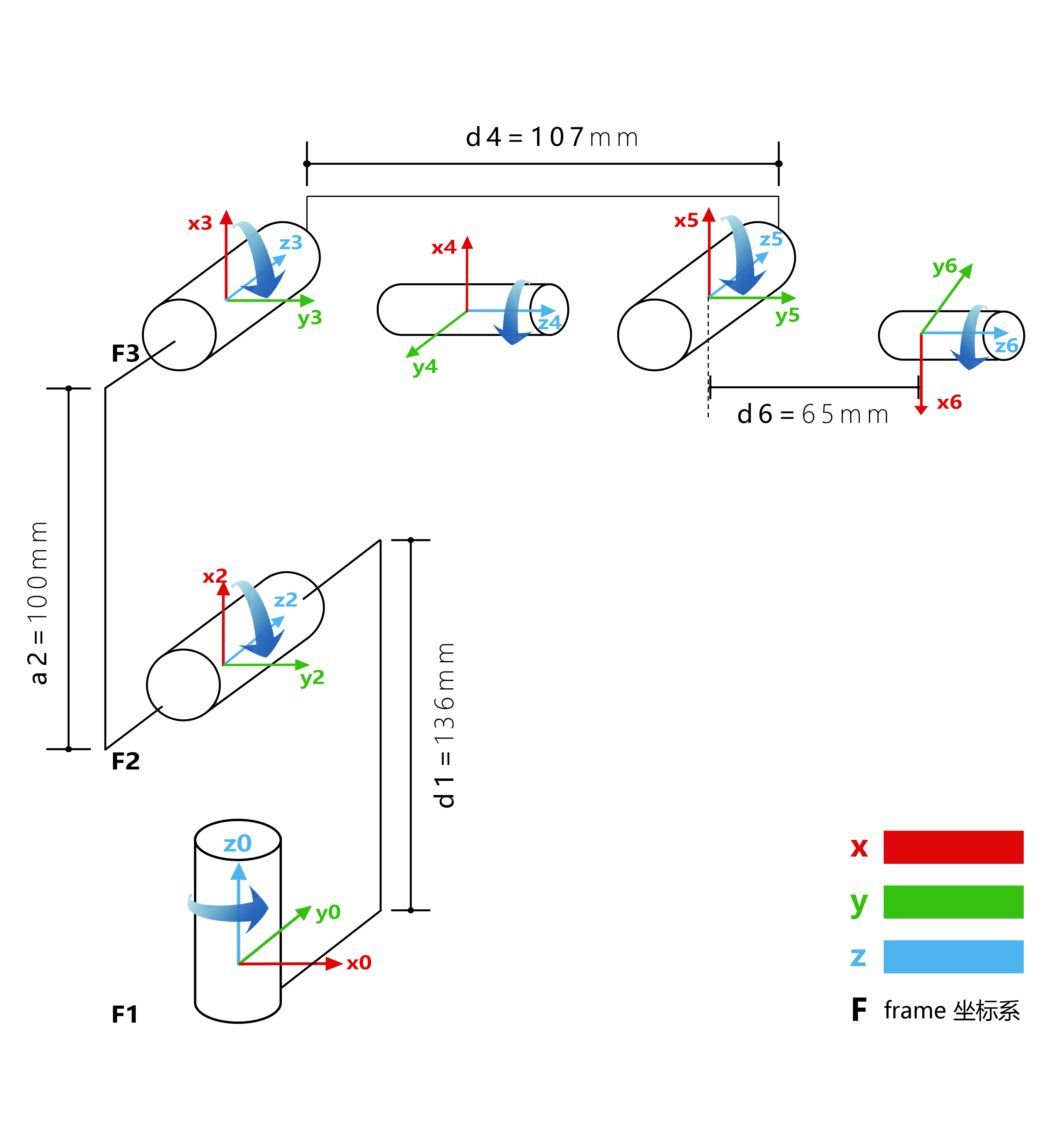
MechArm 270 算法
DH参数
results matching "
"
No results matching "
"