pneumatic gripper
Compatible models: myCobot 320, myCobot Pro 630
product icon

Specifications:
| name | mycobot320 pneumatic gripper |
|---|---|
| Model model | myCobotPro_Gripper_Air_10 |
| craft | Metal + 7500 Nylon |
| Clamping rangeClamp size | 0-8mm |
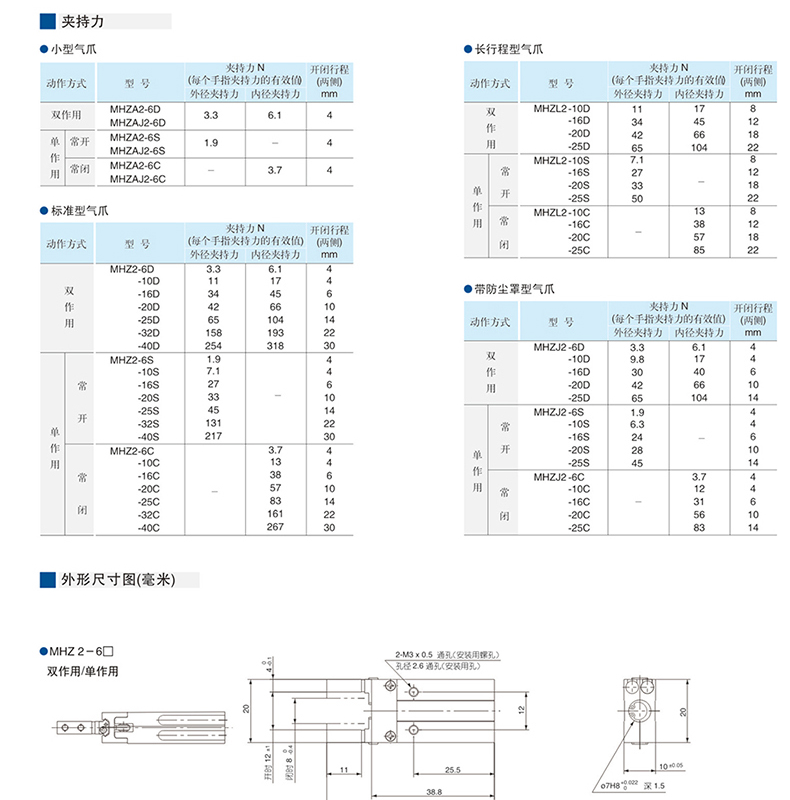
| Clamp force | Outer diameter 34N Inner diameter 45N |
| Repeatability precision | ±0.01mm |
| Lifetime | one year |
| drive mode drive | pneumatic |
| transfer method | Piston cylinder |
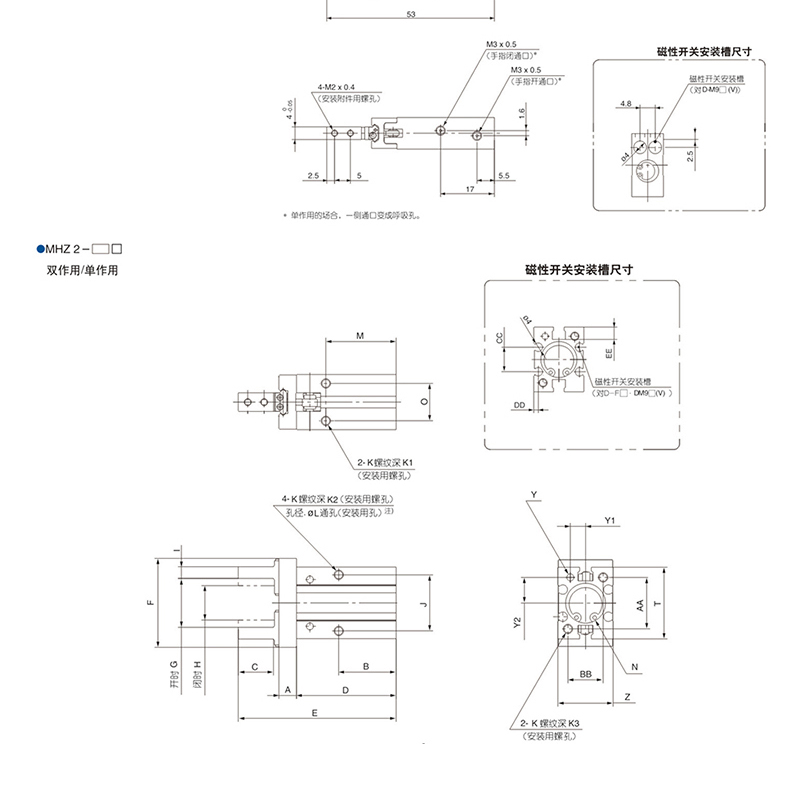
| size | 67.3×38×23.6mm |
| weightweight | 180g |
| Fixed method Fixed | screw fixed |
| Use environment requirements | Temperature and pressure |
| control interface control | I/O control |
| Applicable equipment | ER myCobot 320 M5 ER myCobot 320 Pi ER myCobot Pro 63png0 |
Pneumatic Gripper: used for gripping objects
Introduction
Pneumatic grippers, also known as pneumatic fingers or pneumatic grippers, are actuators that use compressed air as power to grip or grab workpieces. It is small in size, light in weight, compact in appearance, capable of single- and two-way grabbing, automatic centering, high repeatability, and automatic control of the magnetic switch.
Pneumatic gripper set includes gripper flange, air pump, φ8 air pipe, φ6 air pipe, φ8-6 quick connector, solenoid valve and cables. Its main function is to replace human grasping work, which can effectively improve production efficiency and work safety. An external suction pump is required.
working principle
Single piston: the axis drives the crank, and the air claw is driven by the piston to open and close. A corresponding crank groove is respectively arranged on the two claw pieces. In order to reduce the frictional resistance, the claw piece and the body are connected by a steel ball slide rail structure.
Double piston: It is operated by two pistons, and each piston is connected with a pneumatic finger by a roller and a double crank to form a special drive unit. Realize that the pneumatic fingers always move axially to the center, and each finger cannot move independently. Parallel jaw cylinder If the finger moves in the opposite direction, the previously compressed piston is in the exhausted state, while the other piston is in the compressed state.
Applicable object
The volume is smaller than the clamping stroke
The weight is less than the maximum clamping weight
Custom fingertips can expand more items
Appearance introduction
Specifications
| Cylinder body (mm) | 6 | 10 | 16 | 20 |
|---|---|---|---|---|
| Guide bearing width | 5 | 7 | 9 | 12 |
| use fluid | Air | |||
| action mode | Double acting | |||
| Minimum working pressure | 0.15MPa | 0.06MPa | 0.05MPa | |
| Maximum working pressure | 0.7MPa | |||
| Ambient and fluid temperature | Without magnetic switch: -10~+70℃, with magnetic switch: -10~+60℃ (but for freezing) | |||
| Piston speed | 50-500mm/s | |||
| Allowable kinetic energy J | 0.0125 | 0.025 | 0.05 | 0.1 |
| Give oil | unnecessary | |||
| buffer | Rubber bumpers on both ends |
Installed for use
Required for use with an air compressor:

Insert the black plug into the plug;
insert the matching red hose into the socket on the machine:

- The red button is the on/off switch, pull it out to turn it on, press it back in to turn it off:

The clamping jaws are mounted:
You can view the installation instructions for the corresponding accessories in the video:
- Connect the other end of the red hose from the air compressor to the solenoid valve connection:

- Unscrew the other end of the solenoid valve for the activation of the gripper to control opening and closing:


- Use the two matching clear hoses with one end connected to the two ports of the solenoid valve:

- The other end of the transparent hose is connected to the two connections of the gripper jaws:

- Attach the gripper to the end of the arm with the matching screws:

- Connect the other end of the red hose from the air compressor to the solenoid valve connection:
Electrical connection:
- Connect the black wire to the GND of the robot arm base, and the red wire to any one of OUT1~OUT6, and change the pin number of the subsequent programme according to the interface you choose, here we use OUT1:

- Connect the black wire to the GND of the robot arm base, and the red wire to any one of OUT1~OUT6, and change the pin number of the subsequent programme according to the interface you choose, here we use OUT1:
Software driver test:
Test that the jaws are available after installation, using myBlockly. myblockly download
- After confirming that the structural and electrical connections are complete, start the robot arm and open the myblockly software when the graphical interface appears.

- Modify the baud rate to 115200:

- Find
Basicin the list on the left and select theSet Pin Outmodule:
- Set
pin numberto '1' andoutputto '0':
- Find
Timeand select theSleepmodule:
- Set the time as required, here set to
2s:
- Repeat the above steps for the final setup as follows:

- Click on the green Run button in the upper right corner to see the jaws close-open once.
- After confirming that the structural and electrical connections are complete, start the robot arm and open the myblockly software when the graphical interface appears.
Programming Development:
Programming development of jaws using python. python sownload
Create a new python file:
Right click on the desired file path to create a new python file:
The name of the file can be changed as needed

Perform function programming:

The code is as follows:
- Pi Version:
from pymycobot import MyCobot320 from pymycobot import PI_PORT, PI_BAUD # When using the Raspberry Pi version of mycobot, you can refer to these two variables for MyCobot320 initialisation import time # Initialise a MyCobot320 object mc = MyCobot320(PI_PORT, 115200) # Control the jaws to close-open: # Use the gripper state interface 0 for open, 1 for closed mc.set_basic_output(1, 0) time.sleep(1) mc.set_basic_output(2, 1) time.sleep(1) mc.set_basic_output(1, 1) time.sleep(1) mc.set_basic_output(2, 0) time.sleep(1) # See the python API for details on interface usage.Save the file and close it, and open a command-line terminal by right-clicking on an empty space in the folder.

输入:
python AirGripper.py
Clamping jaws can be seen closed-open