myCobot camera module v2.0
Compatible models: myCobot 280, myPalletizer 260, mechArm 270
product icon
Specifications:
| name | myCobot camera module v2.0 |
|---|---|
| model | myCobot_cameraHolder_J6 |
| color | white (default) |
| Material | ABS injection molding |
| size | 836416 |
| USB protocol | USB2.0 HS/FS |
| lens focal length | Standard 1.7mm |
| Field of view | about 60° |
| supported system | Win7/8/10, Linux, MAC |
| service life | two years |
| a fixed way | Lego Connectors |
| Use environment requirements | Temperature and pressure |
| Applicable equipment support | ER myCobot Series 280, ER myPalletizer Series 260, ER mechArm Series 270, ER myBuddy Series 280 |
Camera Flange: Machine Vision
Introduction
- USB high-definition camera can be used with suction pump, self-adaptive gripper, artificial intelligence kit, etc., eye in hand to achieve precise positioning and calibration.
Installation and use
Check that the kit has everything: LEGO connectors, camera module with usb cable.

Camera Mount:
Structural mounting:
Insert the LEGO connector into the socket reserved for the camera module:

Insert the camera module with the connector inserted against the end socket of the arm:

Electrical connections:
- Plug the USB cable into the base USB port:

- Plug the USB cable into the base USB port:
Programming Development:
Programming development of camera modules using python. python 环境下载
Create a new python file:
Ctrl + Alt + TOpen the command line and type:gedit camera.py
The name of the file can be changed as needed
Perform function programming:
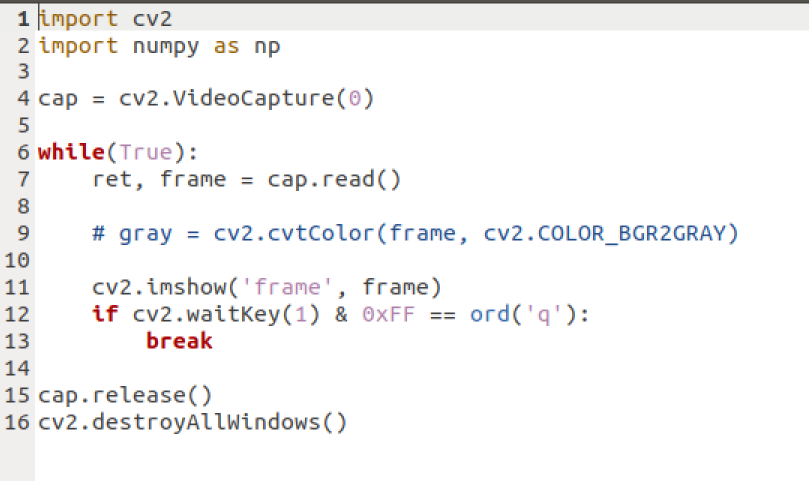
The code is as follows:
import cv2 import numpy as np cap = cv2.VideoCapture(0) # "0", based on the queried camera equipment number while(True): ret, frame = cap.read() # gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY) cv2.imshow('frame', frame) if cv2.waitKey(1) & 0xFF == ord('q'): break cap.release() cv2.destroyAllWindows()Save the file and close it, return to the command line terminal and type:
python camera.py
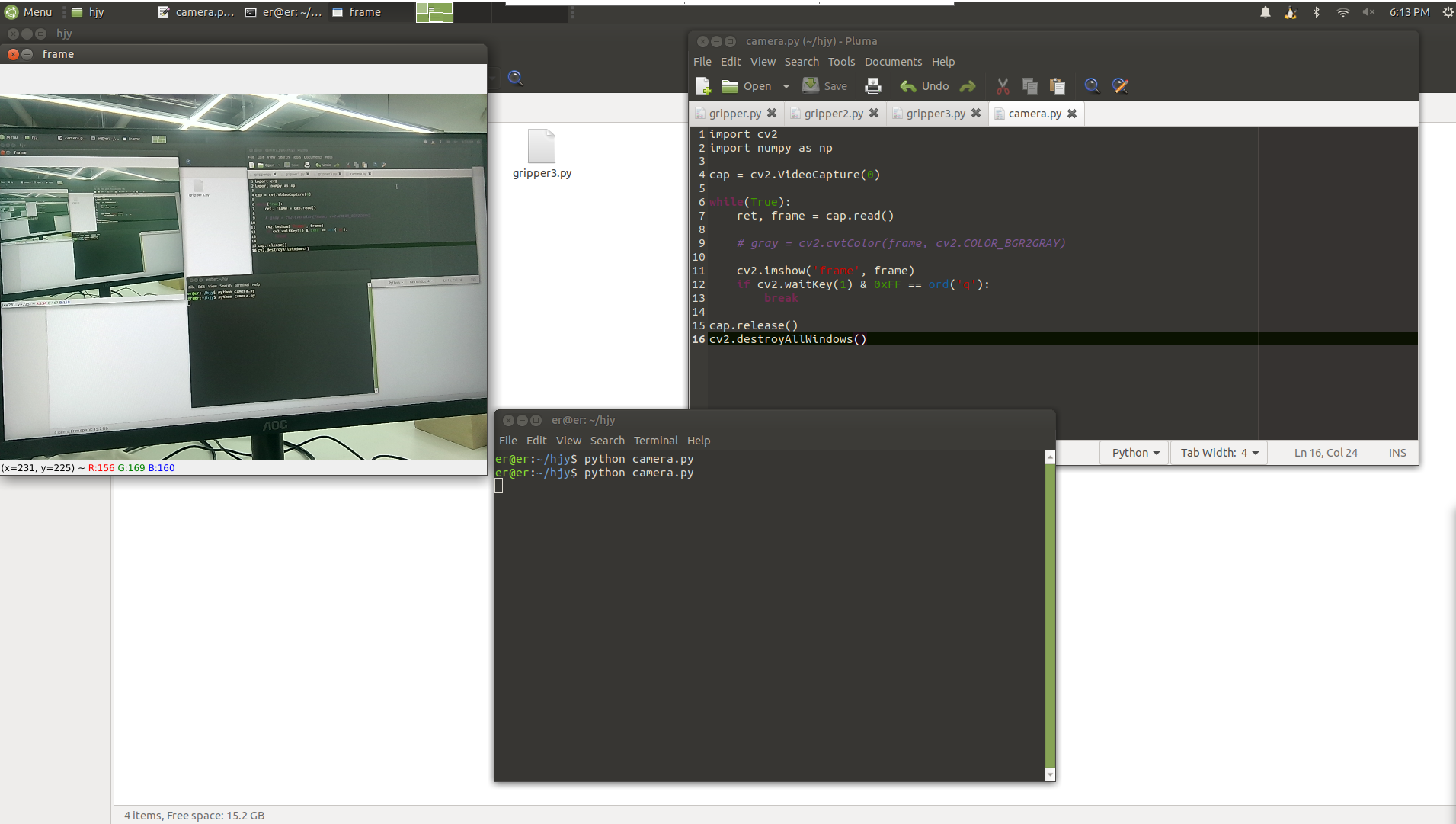
You can see what the camera captured
Run results:
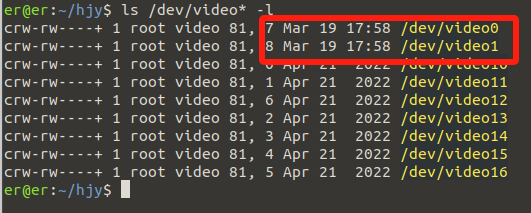
How to check camera device number
ls /dev/video* -l
You can confirm by plugging and unplugging the devices and using the command separately to observe the added device number.
Example result: