环境搭建
mycobot 280 RDK X5机械臂内置python环境
可以通过以下方法来对机械臂的python环境进行检查
python包的检查:
打开终端,输入
pip list
然后按下enter回车键,即可查看目前python环境内所安装的全部包。
在终端内输入
python --version
即可查询目前机械臂所使用的python版本。
在终端输入python,然后回车,当显示了>>>后即代表进入了python编译环境,此时可以使用python来编写代码。
同时也可以使用nano命令来创立python文件。首先打开终端,输入
nano demo.py
然后按下回车键,即可创建名为demo的python文件。此处的demo为创立的python文件的文件名,您可以在此更改为任意名称。按下回车键后会进入代码编辑页面,您可以在此界面对进行python程序代码编写。


当编写好python程序后,按下ctrl+s来对已经编辑好的程序进行保存,再按下ctrl+x退出编辑器。
在打开的终端中输入
python demo.py
即可运行刚刚编写完成的python程序。

Python简单使用
上述准备工作完成之后,开始通过Python代码实现对机械臂的操控。这里以myCobot 280 RDK X5 版本为例进行演示。
首先,打开您安装好的PyCharm,新建一个Python文件,输入以下代码,导入我们的库:
from pymycobot import MyCobot280RDKX5
注意:
如果输入
from pymycobot import MyCobot280RDKX5,字体下方没有出现红色波浪线证明已经安装成功可以使用了,如果出现红色波浪线可以参考如何安装API库 ,如何调用API库。如果不想通过上述命令安装API库,可以通过以下github下载项目到本地。
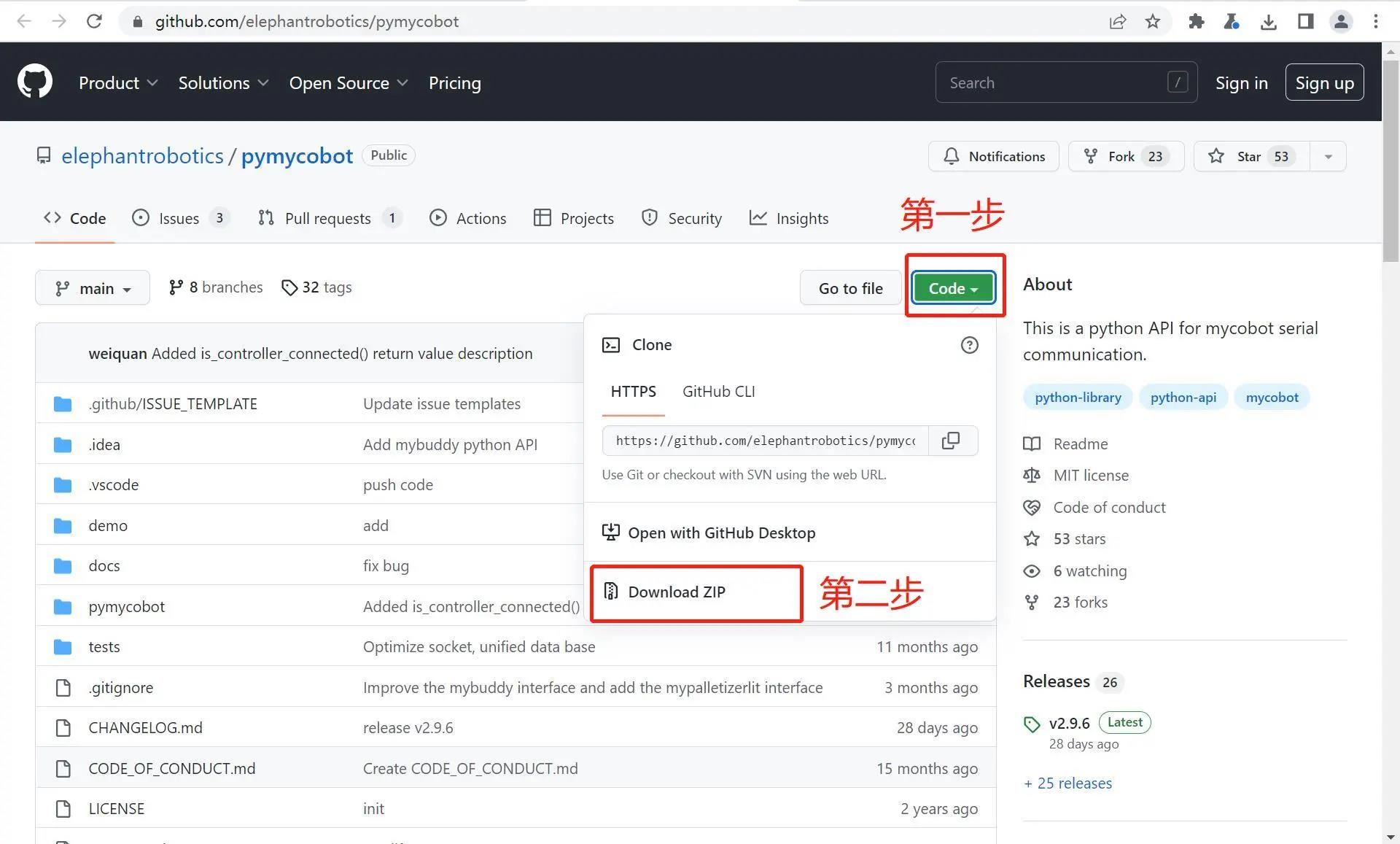
首先,进入项目地址:https://github.com/elephantrobotics/pymycobot。然后点击网页右边Code按钮,再点击Download ZIP下载到本地,将压缩包pymycobot文件项目中的 pymycobot文件夹放入你python依赖库目录中,就可以直接导入使用。
简单演示
新建一个 Python 文件,输入以下代码可执行 LED 闪烁
from pymycobot import MyCobot280RDKX5
import time
#以上需写在代码开头,意为导入项目包
# MyCobot280RDKX5 类初始化需一个个参数:串口
# 初始化一个MyCobot280RDKX5对象
# 下面为 RDK X5版本创建对象代码
mc = MyCobot280RDKX5("/dev/ttyS1")
i = 7
#循环7次
while i > 0:
mc.set_color(0,0,255) #蓝灯亮
time.sleep(2) #等2秒
mc.set_color(255,0,0) #红灯亮
time.sleep(2) #等2秒
mc.set_color(0,255,0) #绿灯亮
time.sleep(2) #等2秒
i -= 1