mycobot280RDKX5视觉套装
1 软件环境配置
在终端输入下面指令,按下键盘回车键,将程序克隆到本地
git clone https://github.com/elephantrobotics/mycobot280RDKX5_vision_kit.git
在终端输入下面指令,按下键盘回车键,进入克隆的文件夹
cd mycobot280RDKX5_vision_kit
在终端输入下面指令,按下键盘回车键,安装需要的依赖库
pip install -r requirements.txt
2 硬件安装
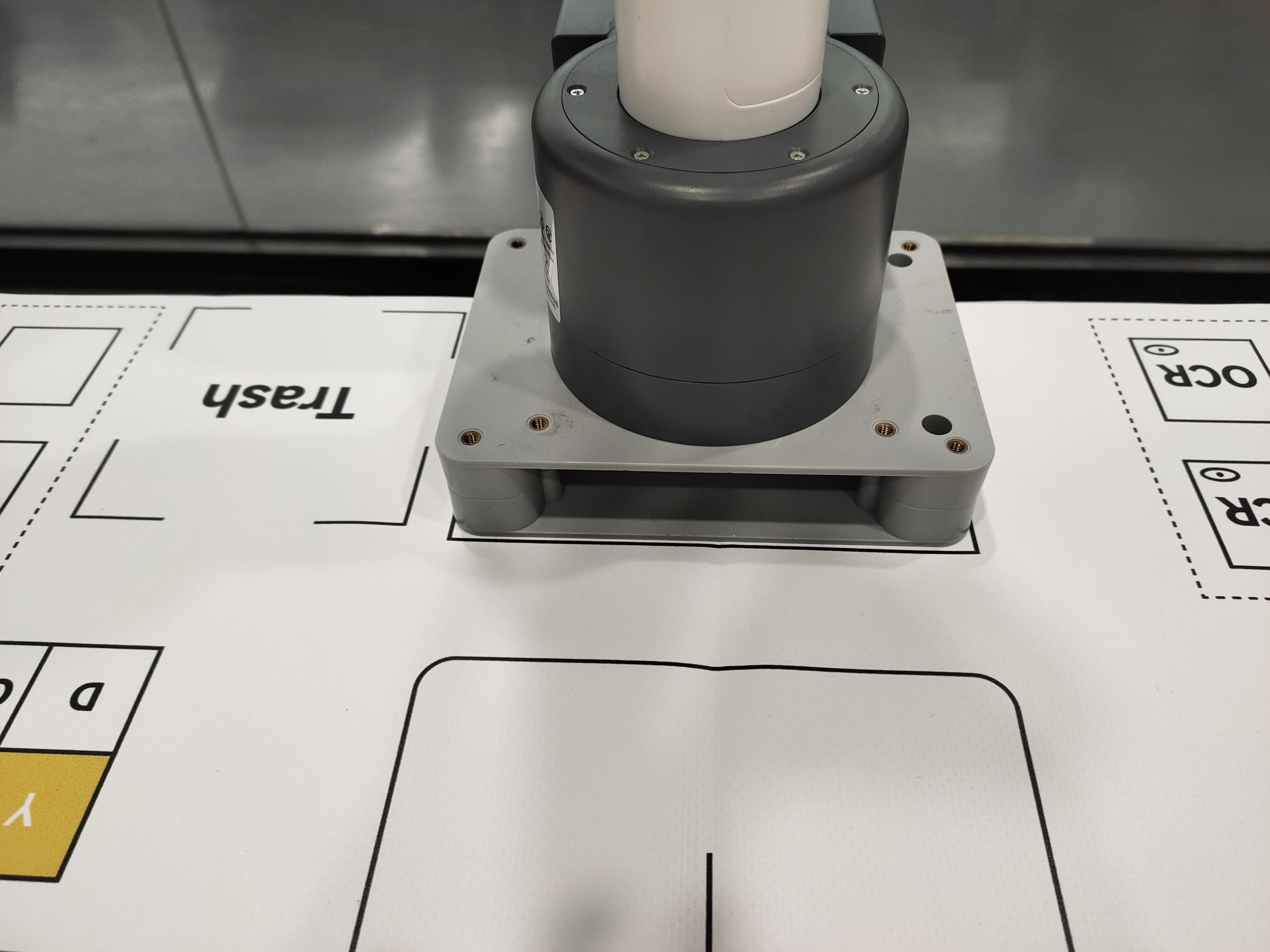
将地图放置在桌子的边缘,方便后面机械臂固定

将底座对准机械臂的底部安装孔,用内六角扳手进行固定

再用G型夹将机械臂固定到地图的机械臂固定区域

尽量将底座和矩形框贴合
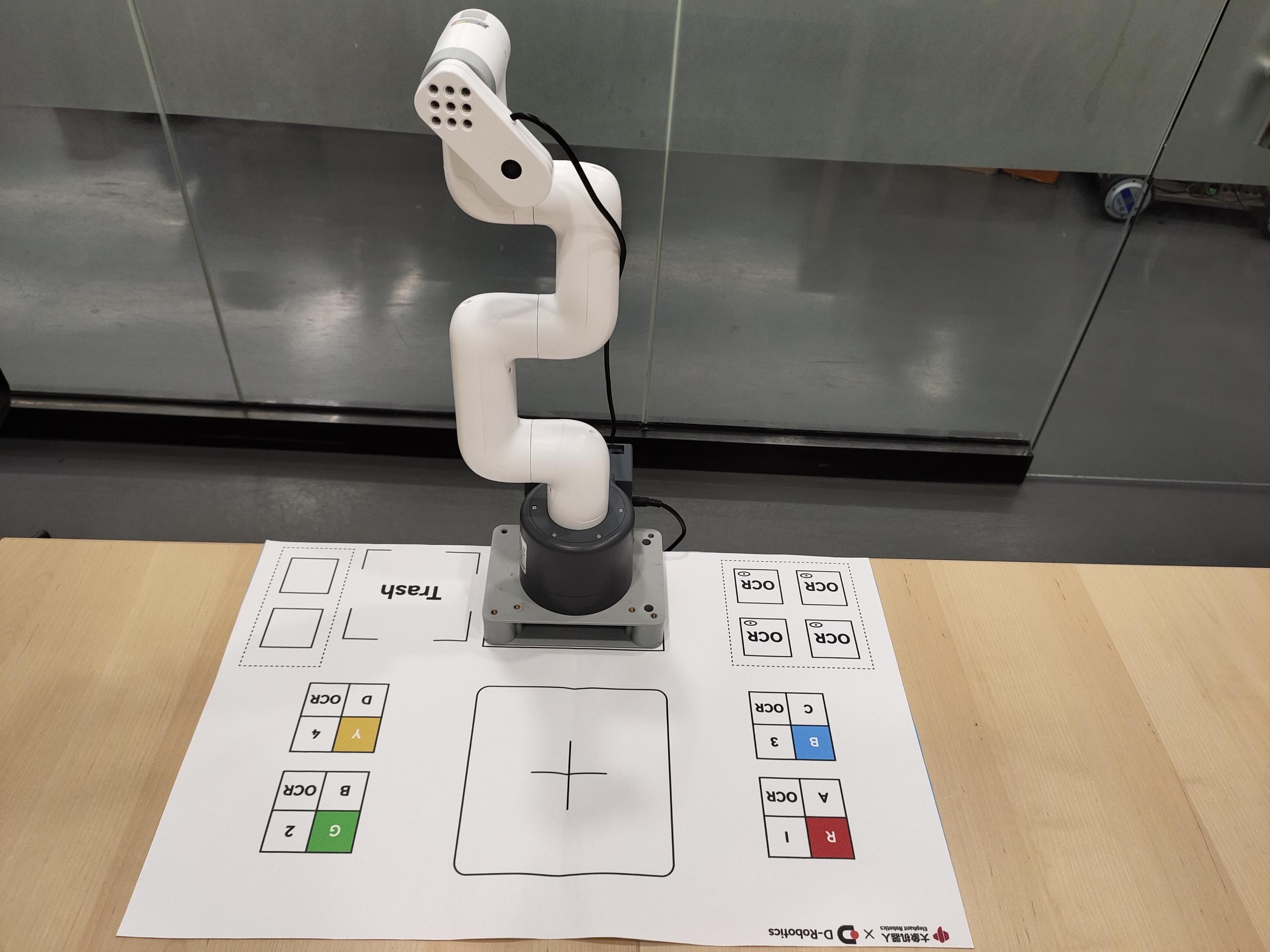
进入mycobot280RDKX5_vision_kit文件夹,在终端输入下面指令,按下键盘回车键,机械臂各个关节会回到零位
python robot_test.py
然后将相机务必按照图片的位置安装到机械臂末端法兰上,否则会导致后面的案例程序则无法正常运行。 注意: 待机械臂回到零位后,观察J6是否处在,若不在的话,需要对机械臂进行零位校准操作

安装完后,需对比一下实物和图片安装是否一致。
然后将末端吸盘安装到相机的乐高插件孔中

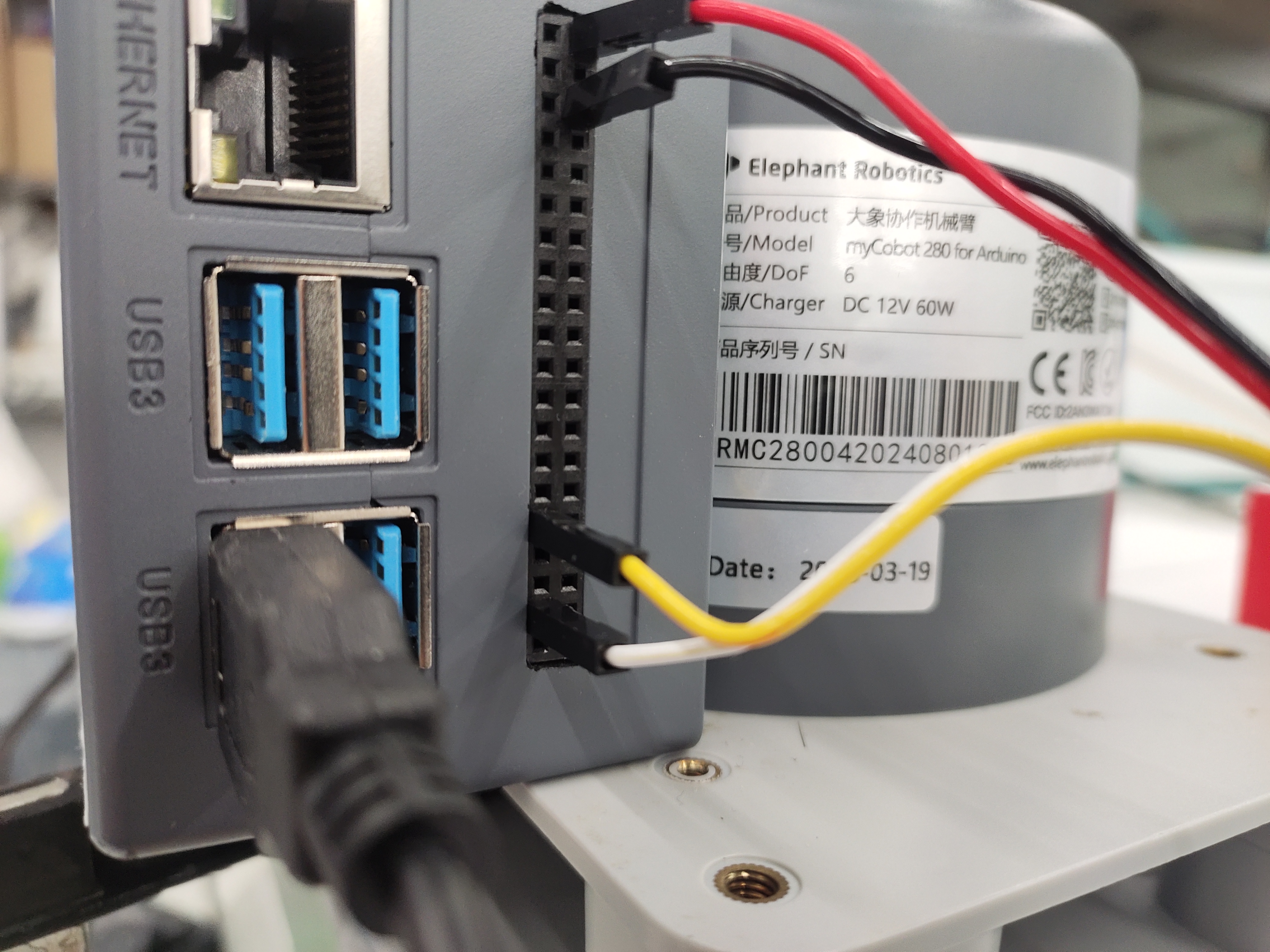
之后将吸泵盒的控制线按照图片进行连接

将相机线接入底部主控的USB接口
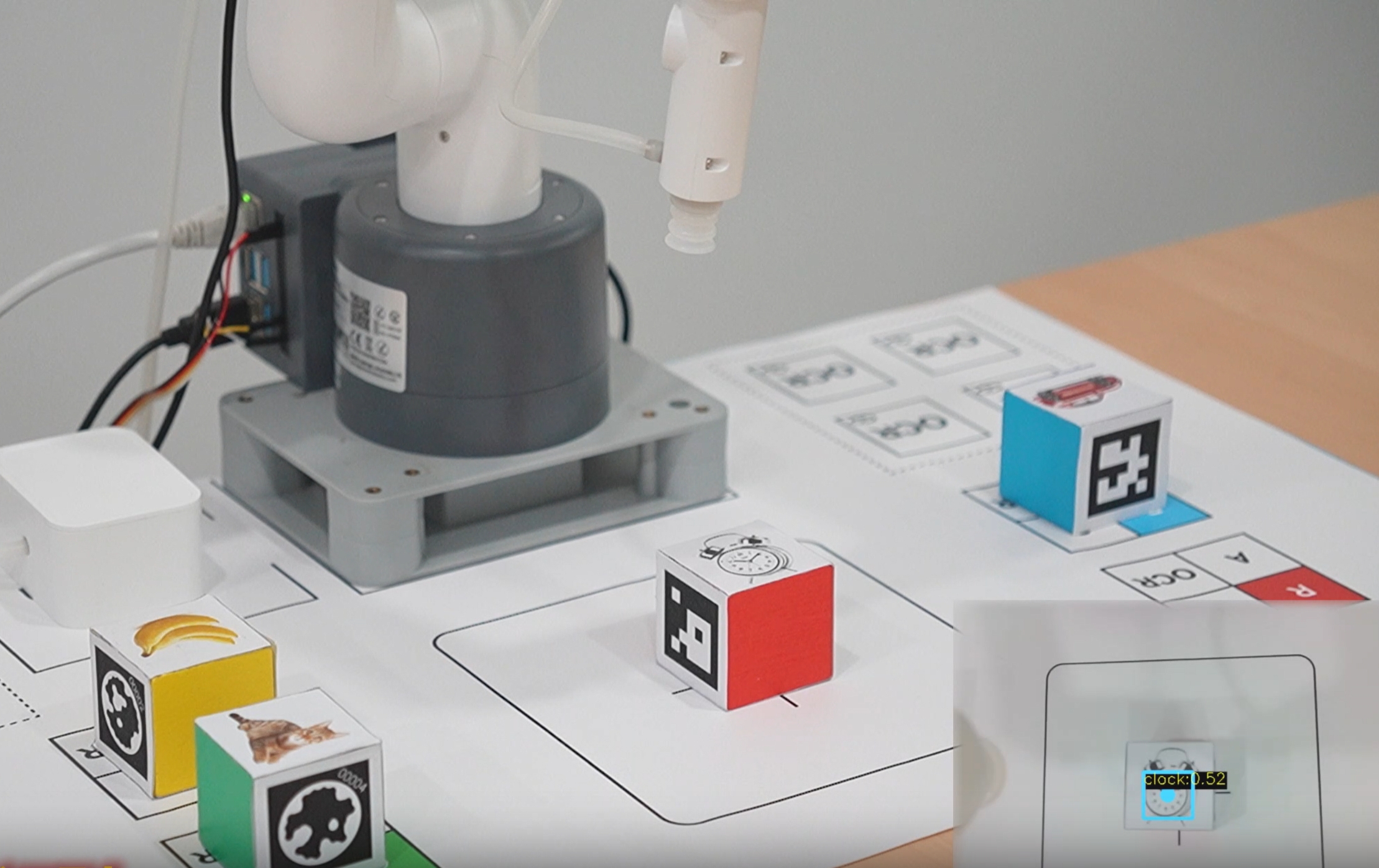
3 案例复现
注意:若要切换案例,需要先把当前案例程序结束掉。先把木块放到拍摄区,再运行案例程序
stag二维码分拣
将4个木块贴着stag码朝上放置到拍摄区,尽量放置在中间,避免机械臂限位

进入mycobot280RDKX5_vision_kit文件夹,在终端输入下面指令,按下键盘回车键后,稍等一段时间,就会打开一个相机窗口,识别成功后,机械臂就会开始抓取
python stag_demo.py
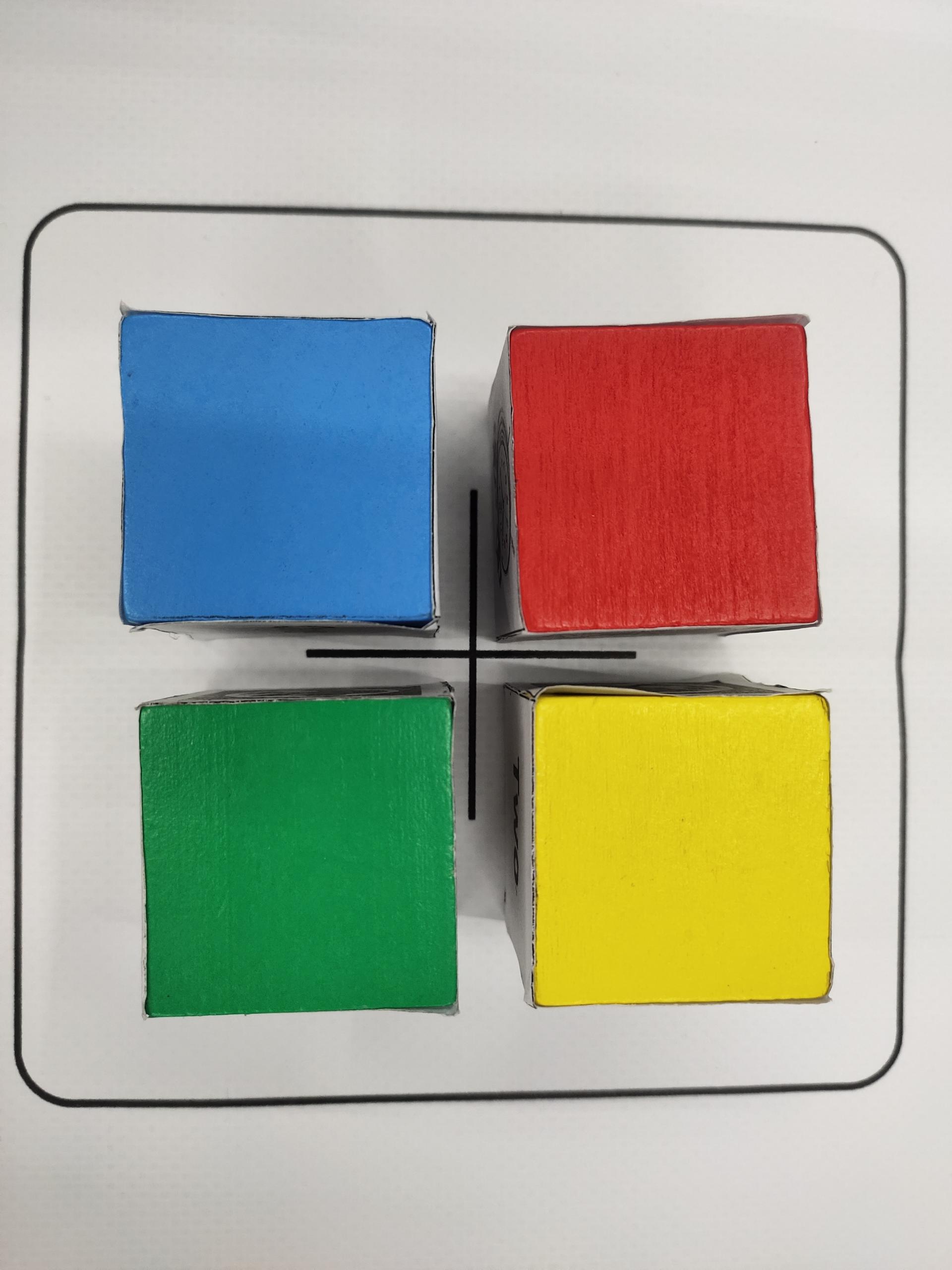
颜色分拣
将4个木块没有贴纸的一面朝上放置到拍摄区,尽量放置在中间,避免机械臂限位
进入mycobot280RDKX5_vision_kit文件夹,在终端输入下面指令,按下键盘回车键后,稍等一段时间,就会打开一个相机窗口,识别成功后,机械臂就会开始抓取
python color_demo.py

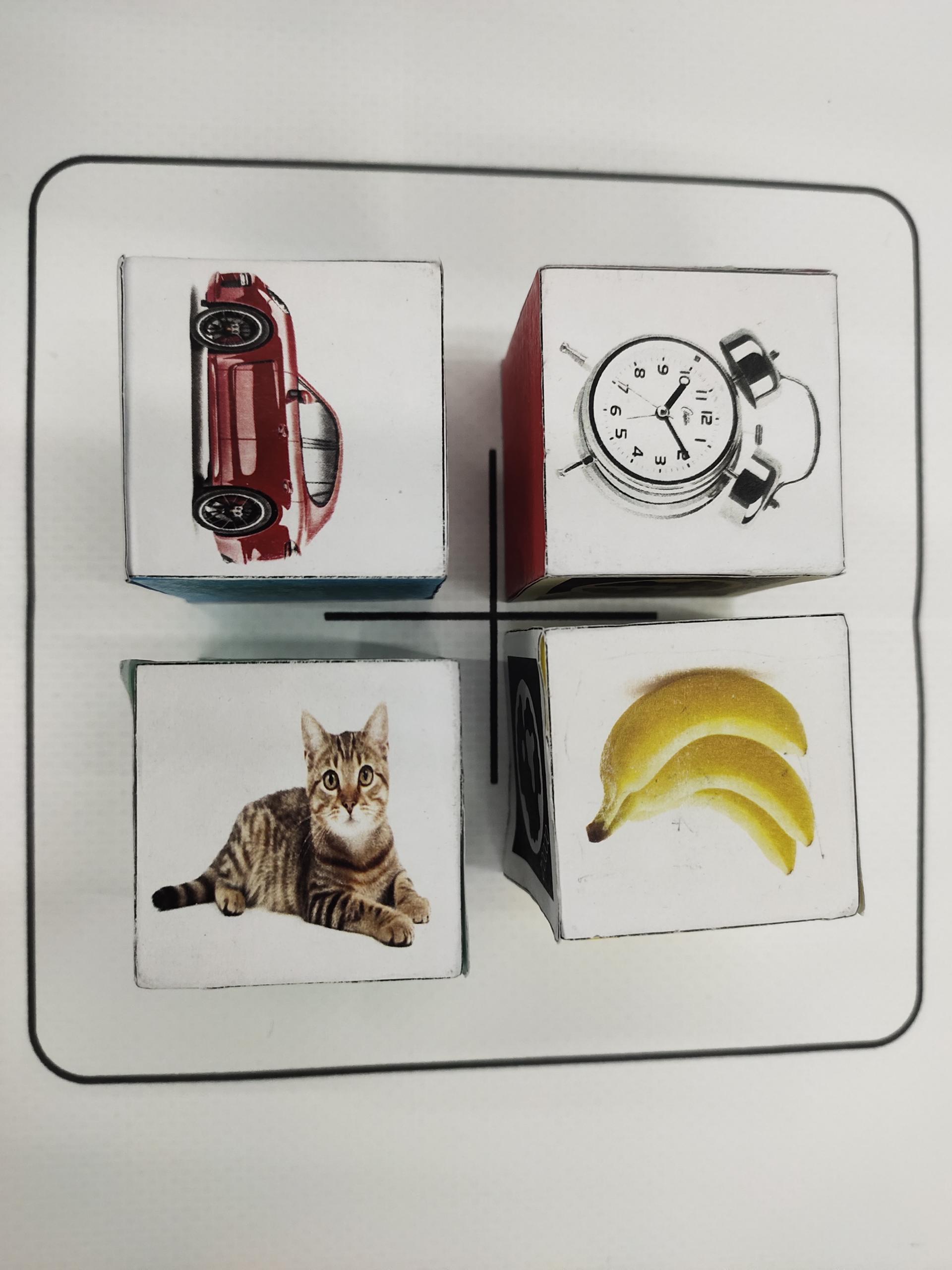
物体分拣
将4个木块贴着物品的一面朝上放置到拍摄区,尽量放置在中间,避免机械臂限位
进入mycobot280RDKX5_vision_kit文件夹,在终端输入下面指令,按下键盘回车键后,稍等一段时间,就会打开一个相机窗口,识别成功后,机械臂就会开始抓取
python yolo_demo.py
注意:如有线物品长时间识别不到,可用人手稍微旋转或移动一下木块
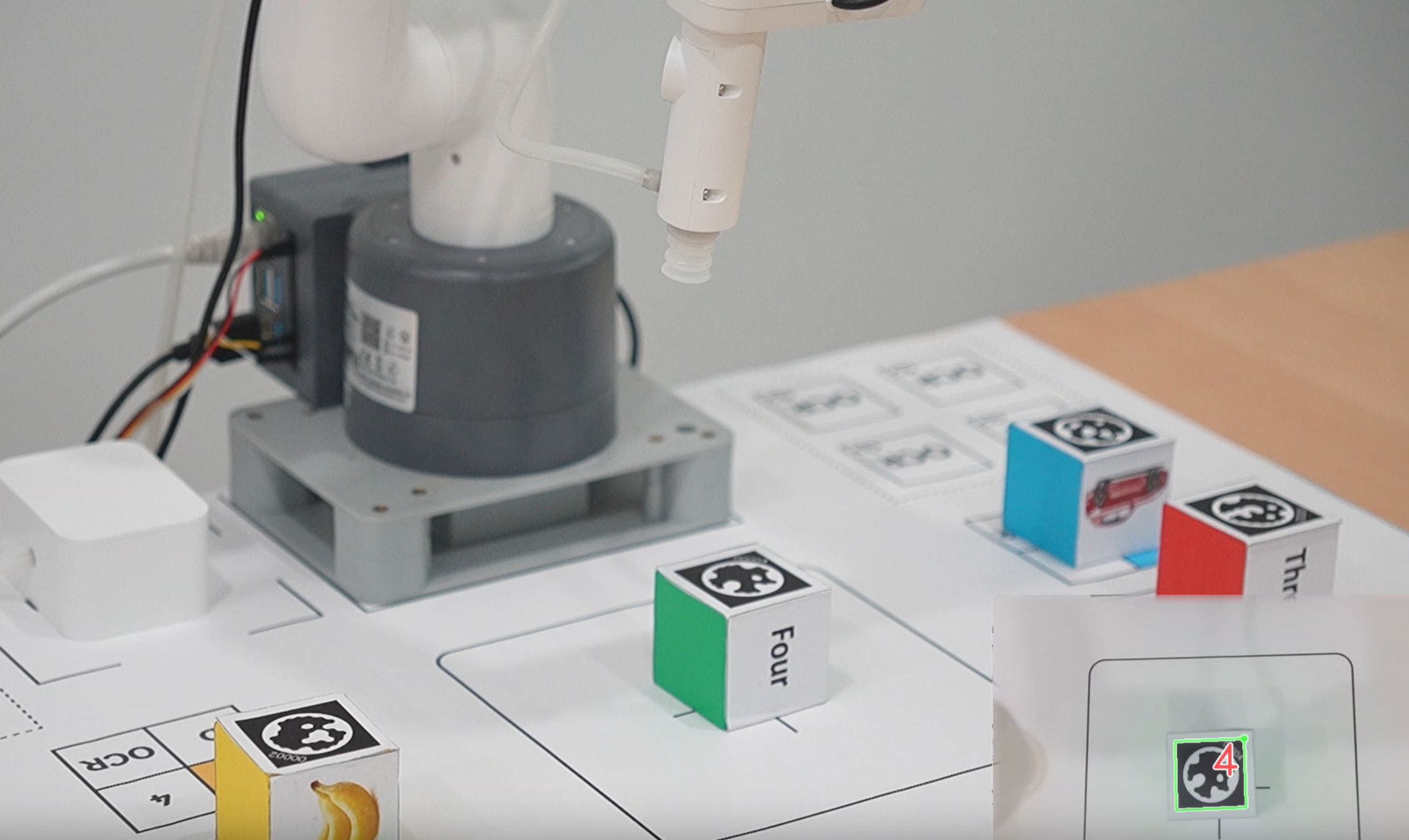
aruco二维码码垛
将4个木块贴着aruco二维码的一面朝上放置到拍摄区,尽量放置在中间,避免机械臂限位

进入mycobot280RDKX5_vision_kit文件夹,在终端输入下面指令,按下键盘回车键后,稍等一段时间,就会打开一个相机窗口,识别成功后,机械臂就会开始抓取
python aruco_demo.py

注意:若有一个木块没成功堆叠,需要先把程序结束掉,把4个木块放回拍摄区,重新运行程序,避免在码垛区发生碰撞
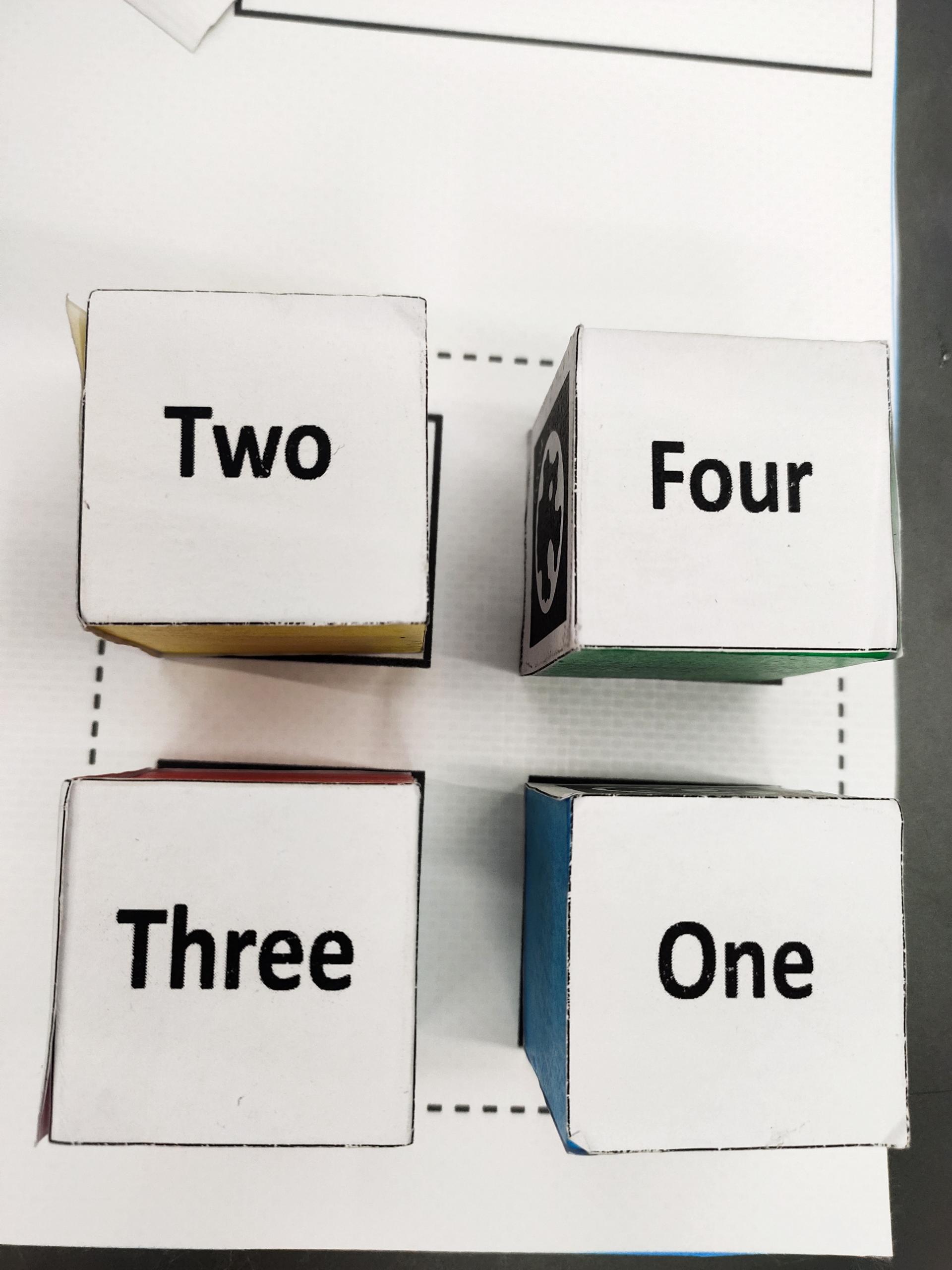
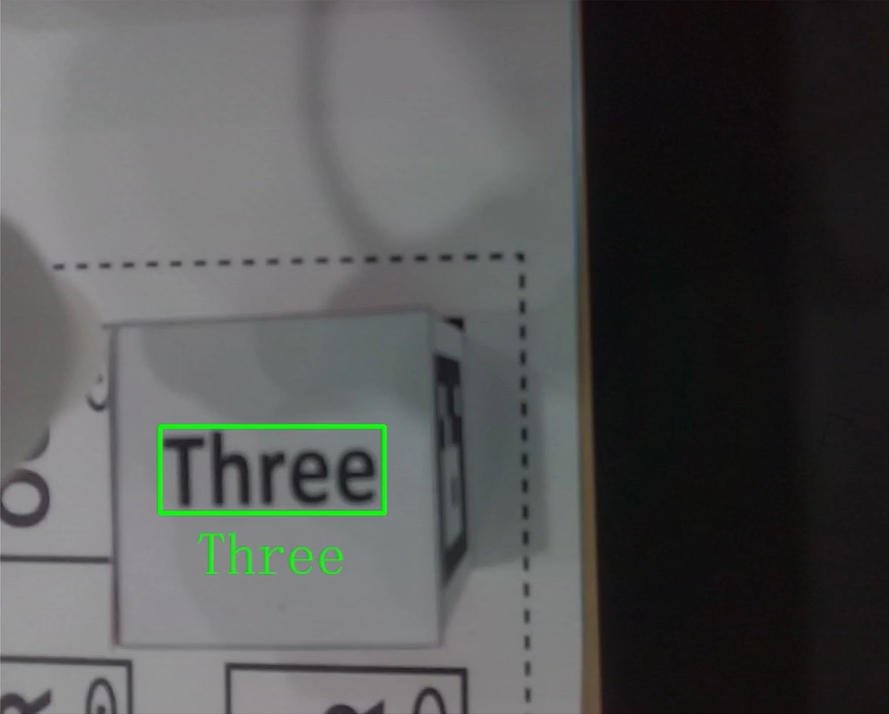
OCR分拣
将4个木块贴着英文单词的一面朝上放置到OCR拍摄区,尽量放置在中间,避免机械臂限位
先在终端输入下面指令,按下键盘回车键
export LD_PRELOAD=/home/sunrise/.local/lib/python3.10/site-packages/paddle/libs/libcommon.so
然后进入mycobot280RDKX5_vision_kit文件夹,在终端输入下面指令,按下键盘回车键后,稍等一段时间,就会打开一个相机窗口,识别成功后,机械臂就会开始抓取
python ocr_demo.py
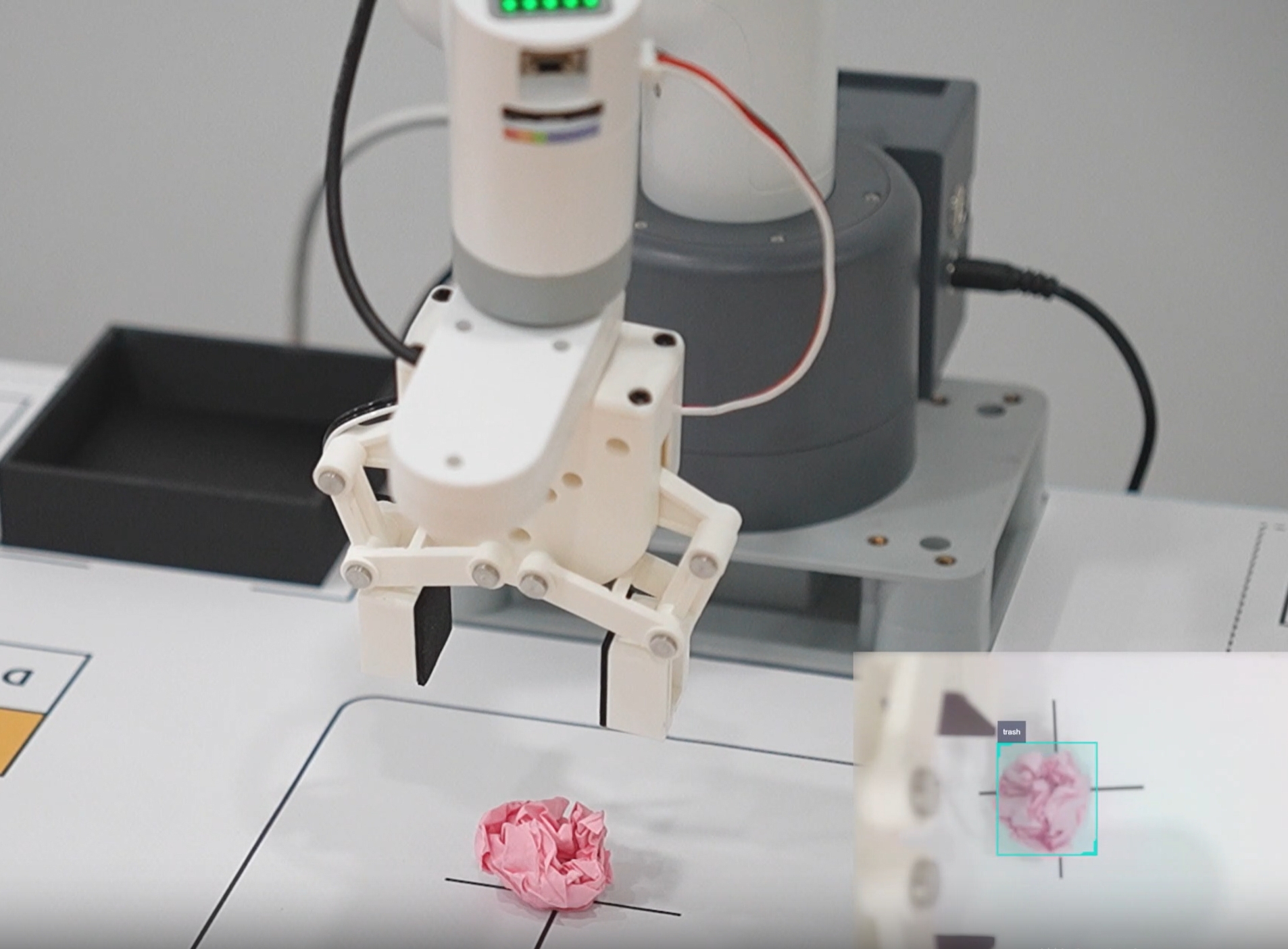
垃圾检测
先将末端吸盘从机械臂末端拆下来,将连接主控的吸泵盒,进入mycobot280RDKX5_vision_kit文件夹,在终端输入下面指令,按下键盘回车键,机械臂各个关节会回到零位
python robot_test.py
然后夹爪按照下图进行连接

将夹爪线接到机械臂末端的3Pin接口上

打开一个终端输入命令,按下键盘回车键运行
export CAM_TYPE=usb
然后再输入下面命令,启动相机识别节点
ros2 launch dnn_node_example dnn_node_example.launch.py dnn_example_config_file:=config/ppyoloworkconfig.json dnn_example_msg_pub_topic_name:=ai_msg_mono2d_trash_detection dnn_example_image_width:=640 dnn_example_image_height:=480
在RDKX5主控上的浏览器输入http://192.168.127.10:8000 即可查看图像和算法渲染效果:
然后进入mycobot280RDKX5_vision_kit文件夹,在终端输入下面指令,按下键盘回车键后,识别成功后,机械臂就会开始抓取
python garbage_demo.py