手势识别案例
1 硬件安装
先将末端法兰手动对齐刻度线

然后将相机按照图片的姿态安装到末端法兰上,再将相机线查到底部的主控的USB接口上

2 软件运行
打开一个终端输入命令,按下键盘回车键运行
export CAM_TYPE=usb
然后再输入下面命令,启动相机识别节点
# 切换到主目录
cd ~
# 再运行程序
ros2 launch hand_gesture_detection hand_gesture_detection.launch.py
输出log显示,节点运行成功
[hand_gesture_detection-5] [C][32711][08-12][09:39:39:575][configuration.cpp:49][EasyDNN]EasyDNN version: 0.4.11
[hand_gesture_detection-5] [DNN] Runtime version = 1.9.7_(3.14.5 HBRT)
[hand_gesture_detection-5] [WARN] [1660268379.611419981] [hand gesture det node]: input_idx: 0, tensorType = 8, tensorLayout = 0
[hand_gesture_detection-5] [WARN] [1660268379.619313022] [hand gesture det node]: Create subscription with topic_name: /hobot_hand_lmk_detection
[hand_gesture_detection-5] [WARN] [1660268379.629207314] [hand gesture det node]: ai_msg_pub_topic_name: /hobot_hand_gesture_detection
[mono2d_body_detection-3] (MOTMethod.cpp:39): MOTMethod::Init config/iou2_euclid_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (IOU2.cpp:34): IOU2 Mot::Init config/iou2_euclid_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (MOTMethod.cpp:39): MOTMethod::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (IOU2.cpp:34): IOU2 Mot::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (MOTMethod.cpp:39): MOTMethod::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (IOU2.cpp:34): IOU2 Mot::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (MOTMethod.cpp:39): MOTMethod::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[mono2d_body_detection-3] (IOU2.cpp:34): IOU2 Mot::Init config/iou2_method_param.json
[mono2d_body_detection-3]
[hand_gesture_detection-5] [WARN] [1660268381.026173815] [hand_gesture_det]: Sub smart fps 31.16
[hand_gesture_detection-5] [WARN] [1660268381.206196565] [hand_gesture_det]: Pub smart fps 30.17
[hand_gesture_detection-5] [WARN] [1660268382.054034899] [hand_gesture_det]: Sub smart fps 30.19
[hand_gesture_detection-5] [WARN] [1660268382.234087357] [hand_gesture_det]: Pub smart fps 30.19
[hand_gesture_detection-5] [WARN] [1660268383.055988982] [hand_gesture_det]: Sub smart fps 29.97
[hand_gesture_detection-5] [WARN] [1660268383.235230316] [hand_gesture_det]: Pub smart fps 30.00
[hand_gesture_detection-5] [WARN] [1660268384.087152150] [hand_gesture_det]: Sub smart fps 30.10
[hand_gesture_detection-5] [WARN] [1660268384.256141566] [hand_gesture_det]: Pub smart fps 30.39
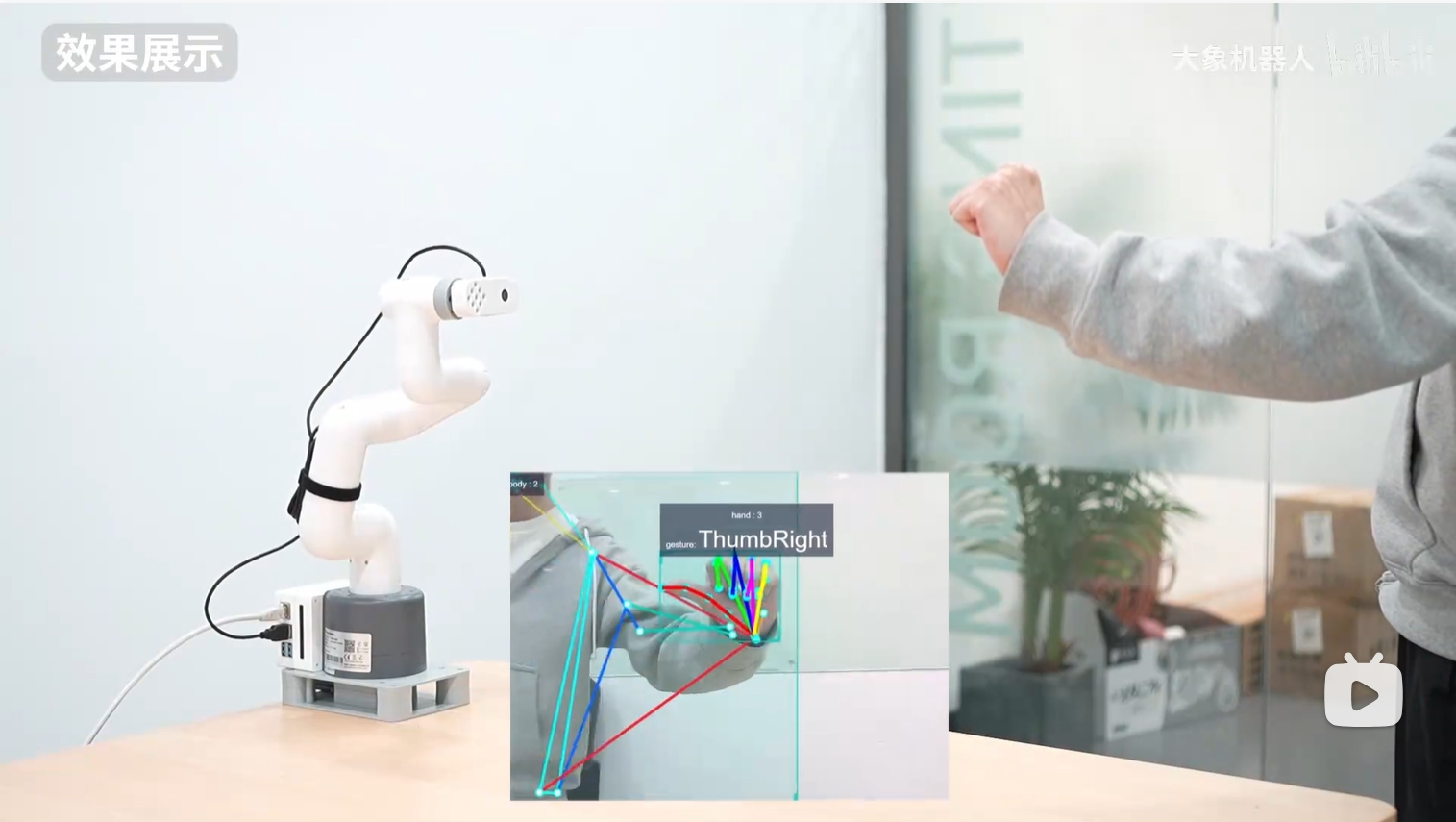
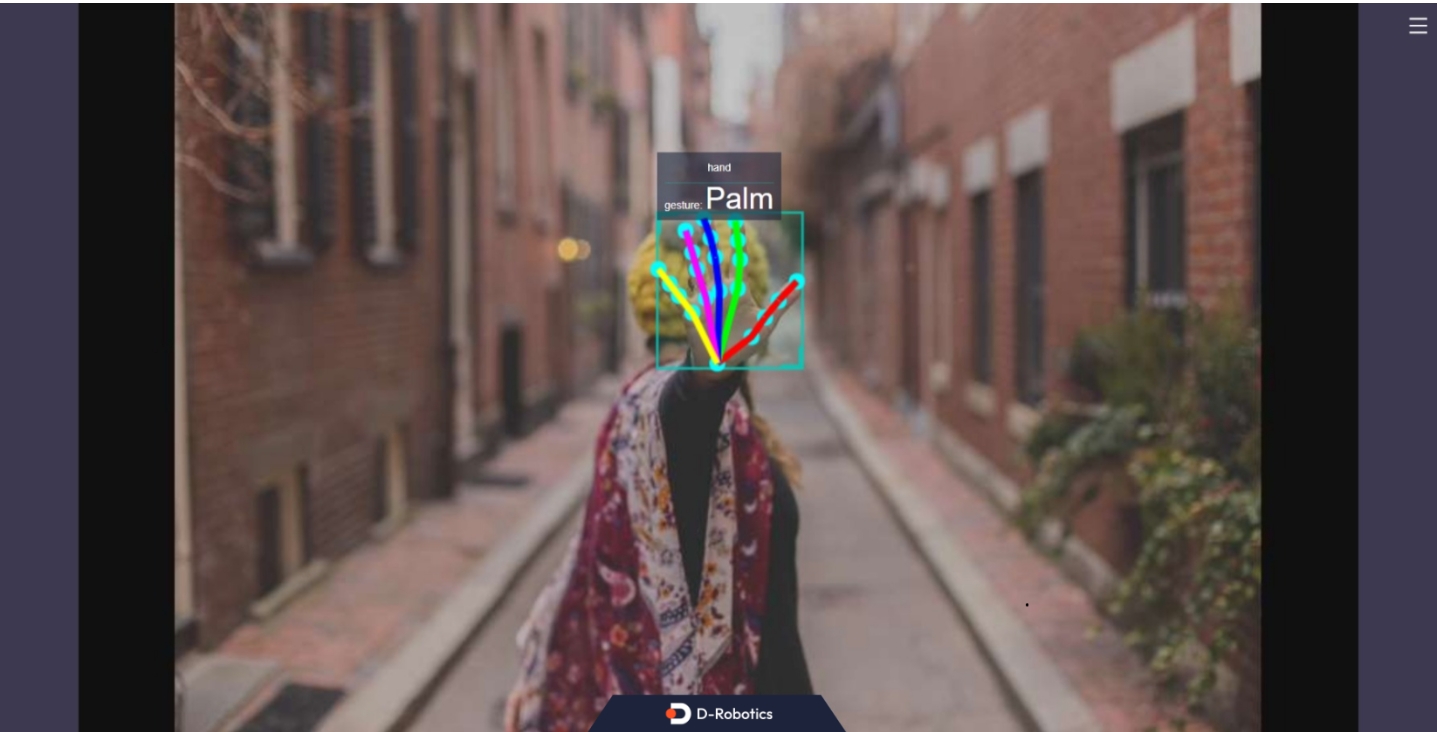
在PC端的浏览器输入http://IP:8000 即可查看图像和算法渲染效果(IP为RDK的IP地址):
| 手势 | 说明 | 数值 |
|---|---|---|
| ThumbUp | 竖起大拇指 | 2 |
| Victory | “V”手势 | 3 |
| Mute | “嘘”手势 | 4 |
| Palm | 手掌 | 5 |
| Okay | OK手势 | 11 |
| ThumbLeft | 大拇指向左 | 12 |
| ThumbRight | 大拇指向右 | 13 |
| Awesome | 666手势 | 14 |
案例程序
import rclpy
from rclpy.node import Node
from ai_msgs.msg import PerceptionTargets
from sensor_msgs.msg import CompressedImage
from pymycobot import MyCobot280RDKX5,utils
import time
import cv2
import numpy as np
class MinimalSubscriber(Node):
def __init__(self):
self.mc=MyCobot280RDKX5("/dev/ttyS1",1000000)
self.mc.set_fresh_mode(0)
self.mc.sync_send_angles([0,0,0,0,0,46.3],100)
print("ok")
super().__init__('minimal_subscriber')
self.cam_subscription = self.create_subscription(
CompressedImage,
'/image',
self.cam_listener_callback,
10)
self.subscription = self.create_subscription(
PerceptionTargets,
'hobot_hand_gesture_detection',
self.listener_callback,
10)
self.subscription # prevent unused variable warning
self.value=None
self.img=None
self.count=0
# self.lock = threading.Lock()
def cam_listener_callback(self, msg):
np_arr = np.frombuffer(msg.data, np.uint8)
cv_image = cv2.imdecode(np_arr, cv2.IMREAD_COLOR)
self.img=cv_image
def listener_callback(self, msg):
for target in msg.targets:
for attribute in target.attributes:
self.get_logger().info(f'Value: "{attribute.value}"')
# self.get_logger().info(f'confidence: "{attribute.confidence}"')
tmp=int(attribute.value)
self.count+=1
#print (f"count={self.count}")
if self.count==50 and tmp==self.value:
if self.value==5:
self.mc.send_angles([0,0,0,0,0,46.3],100)
time.sleep(1)
self.mc.send_angles([0, -15.99, -49.57, 67.93, 7.99, 46.3],100)
time.sleep(1)
# self.mc.sync_send_angles([0, 30.58, -49.57, 12.48, 21.44, 0],100)
# time.sleep(1)
self.mc.send_angles([0,0,0,0,0,46.3],100)
time.sleep(1)
# self.value=None
elif self.value==3:
if self.img is not None:
cv2.imshow("Compressed Image", self.img)
cv2.waitKey(2000)
cv2.destroyAllWindows()
# self.value=None
elif self.value==11:
for i in range(1):
self.mc.send_angles([0, 0, 0, -70, 0, 46.3],100)
time.sleep(1)
self.mc.send_angles([0, 0, 0, 0, 0, 46.3],100)
time.sleep(1)
# self.value=None
elif self.value==12:
self.mc.send_angles([0, -15.99, -49.57, 67.93, 7.99, 46.3],100)
time.sleep(1)
self.mc.send_angles([-30.58, -45.61, -0.96, 47.37, 38.84, 46.3],100)
time.sleep(1)
elif self.value==13:
self.mc.send_angles([0, -15.99, -49.57, 67.93, 7.99, 46.3],100)
time.sleep(1)
self.mc.send_angles([34.36, -6.24, -63.1, 69.96, -26.27, 46.3],100)
time.sleep(1)
elif self.value==2:
self.mc.send_angles([0, -15.99, -49.57, 67.93, 7.99, 46.3],100)
time.sleep(1)
self.mc.send_angles([0.79, -13.35, -28.38, 37.7, 7.47, 46.3],100)
time.sleep(1)
elif self.value==4:
self.mc.send_angles([0.7, 48.33, -113.55, 61.43, 0.0, 46.3],100)
time.sleep(1)
elif self.value==14:
self.mc.send_angles([0.7, 48.33, -113.55, 61.43, 0.0, 46.3],100)
time.sleep(1)
for i in range(3):
self.mc.send_angles([0.7, 48.33, -113.55, 61.43, 0.0, 46.3],100)
self.mc.send_angles([0.7, 33.92, -77.34, 38.4, 0.08, 46.3],100)
self.mc.send_angles([0.7, 33.92, -77.34, 38.4, 0.08, 46.3],100)
time.sleep(2)
self.count=0
self.value=tmp
if self.count>50:
self.count=0
def main(args=None):
rclpy.init(args=args)
minimal_subscriber = MinimalSubscriber()
rclpy.spin(minimal_subscriber)
minimal_subscriber.destroy_node()
rclpy.shutdown()
if __name__ == '__main__':
main()
效果展示